Download to read offline
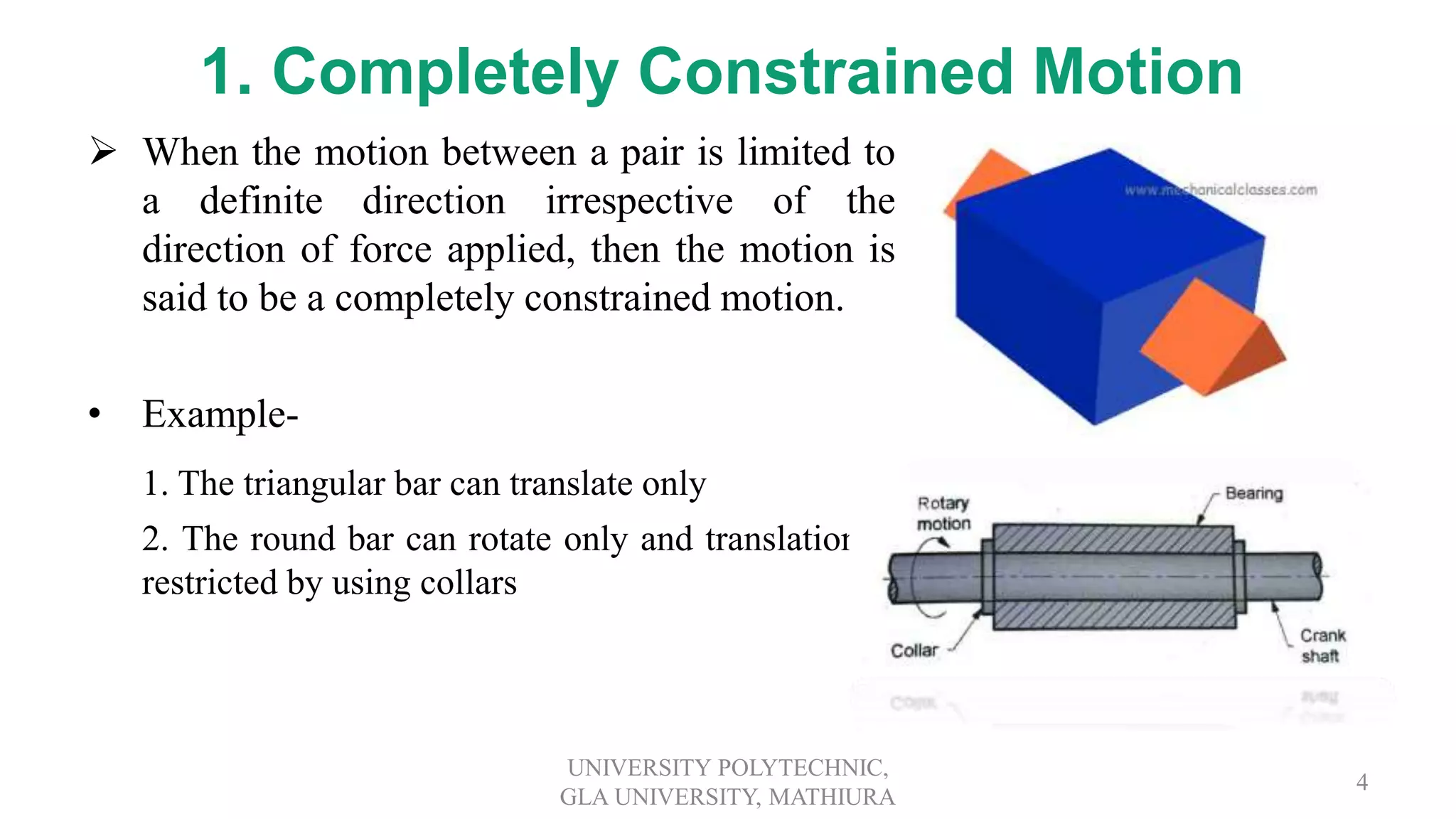
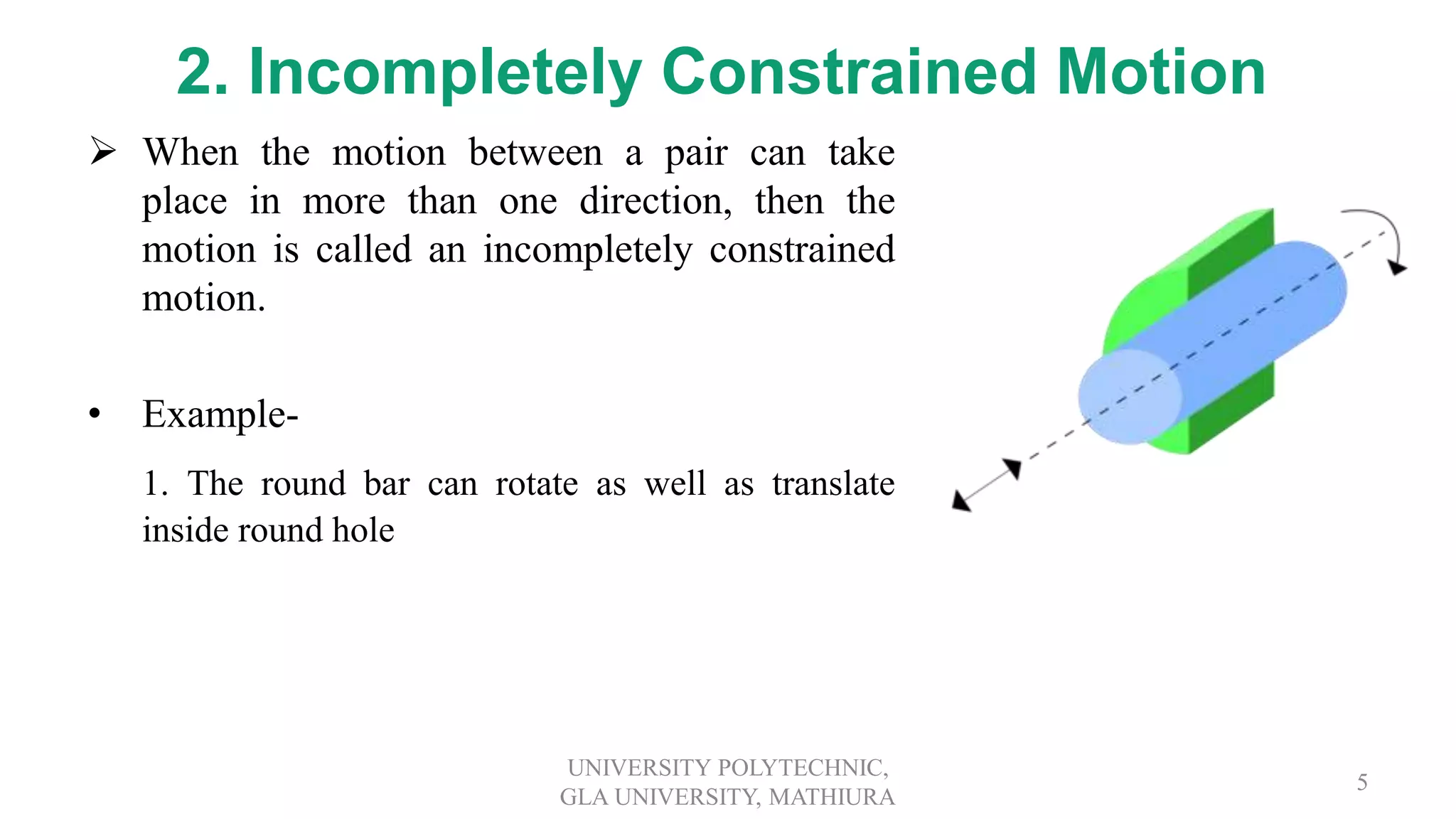
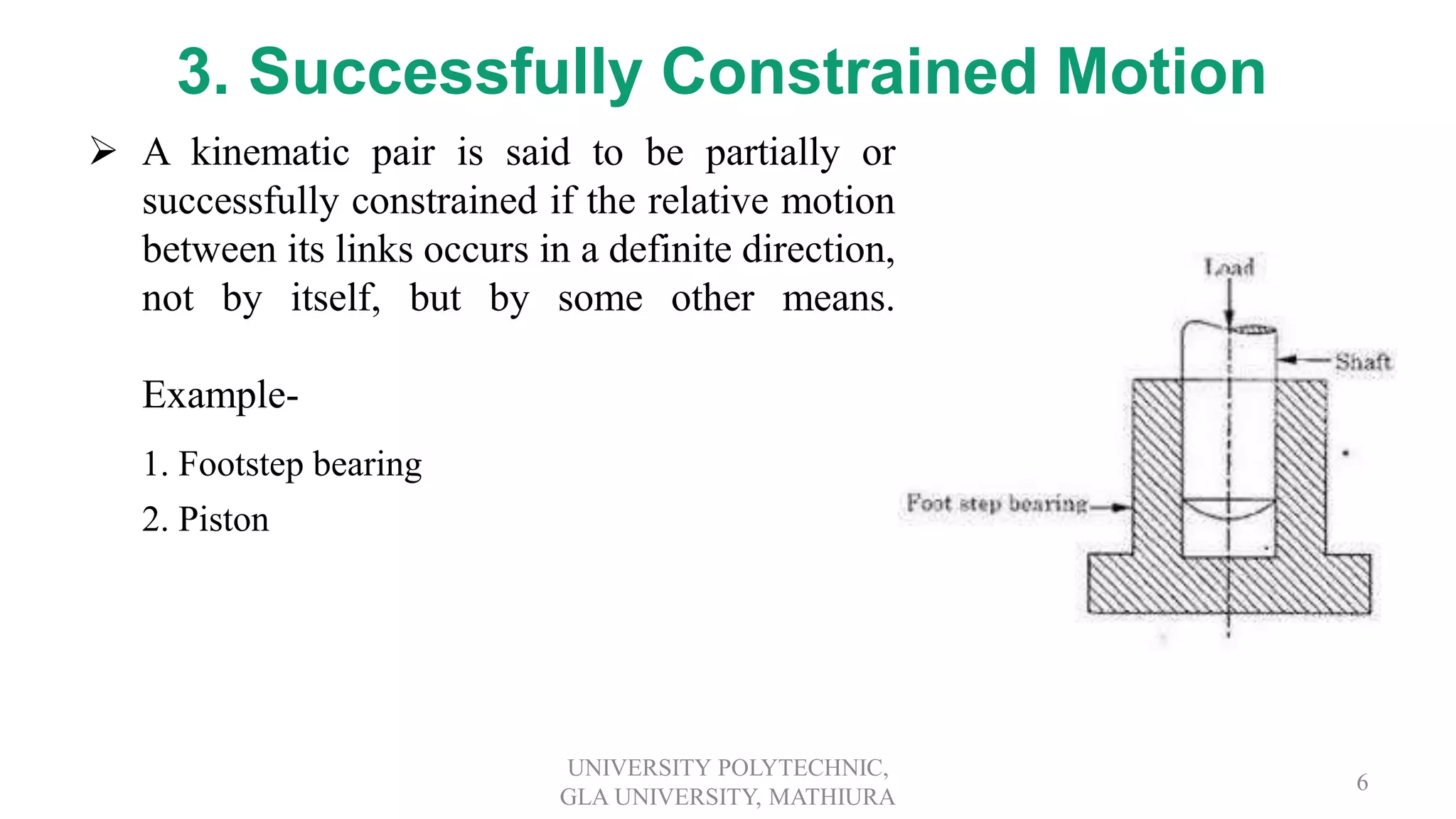
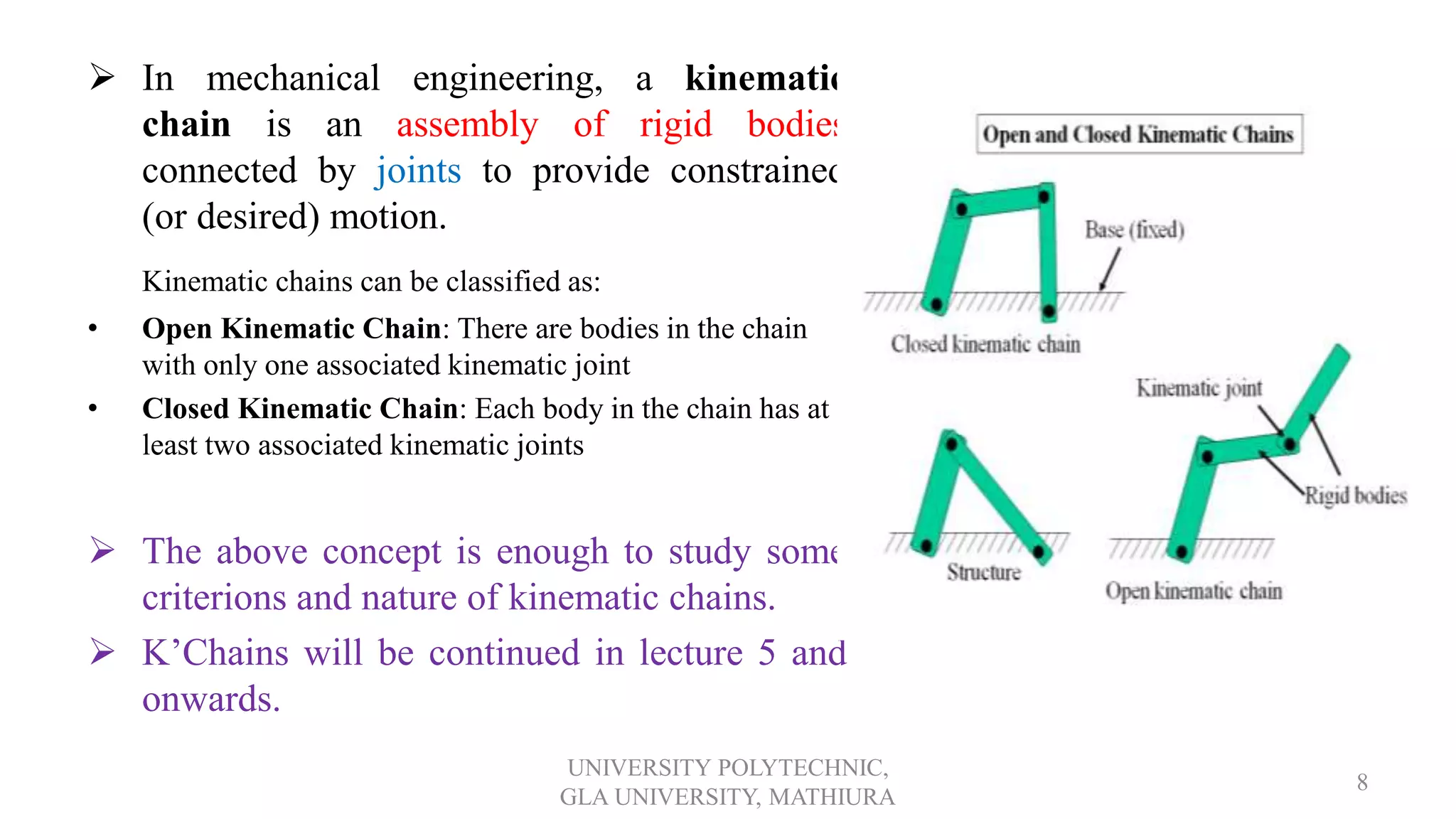
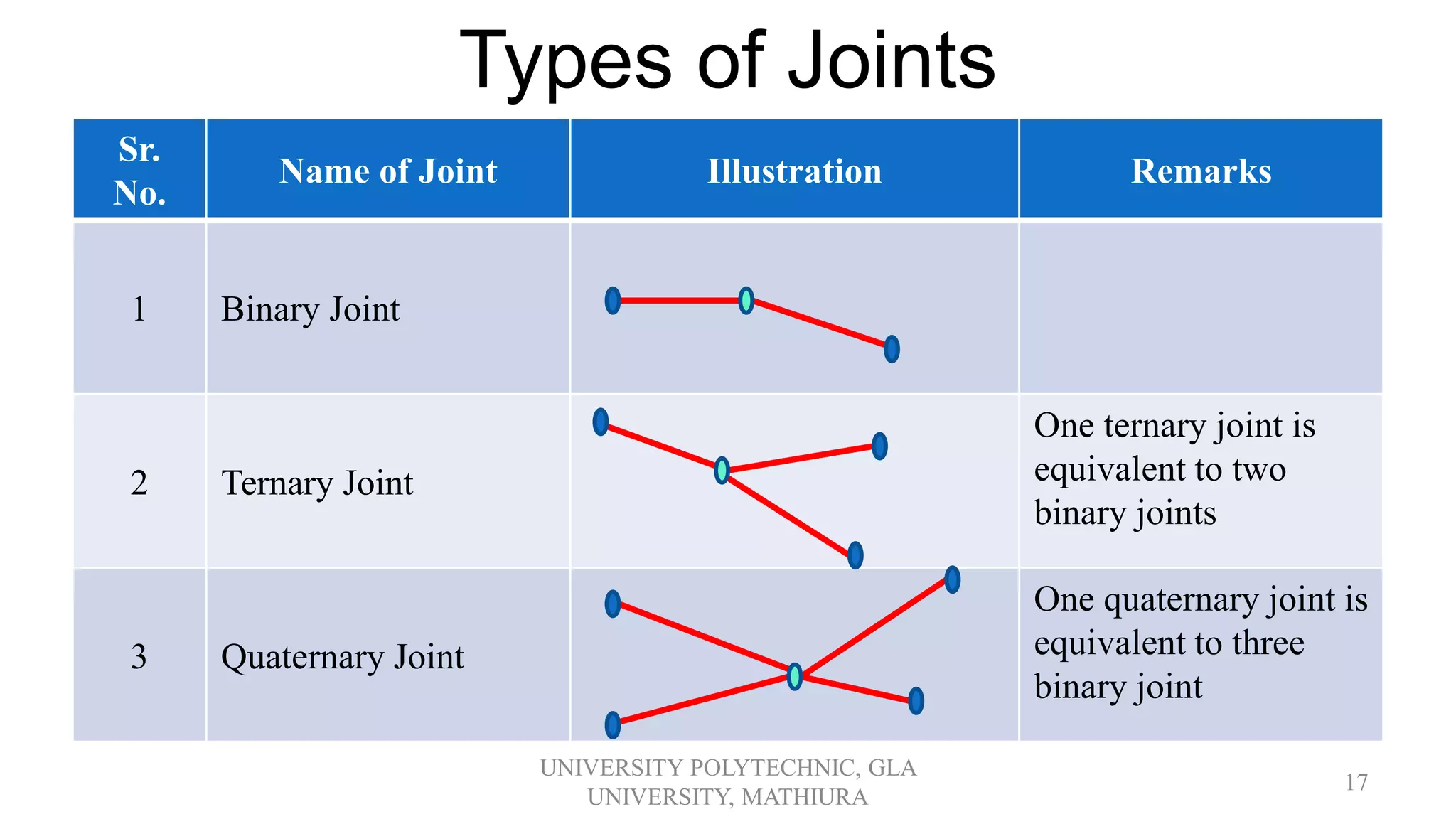
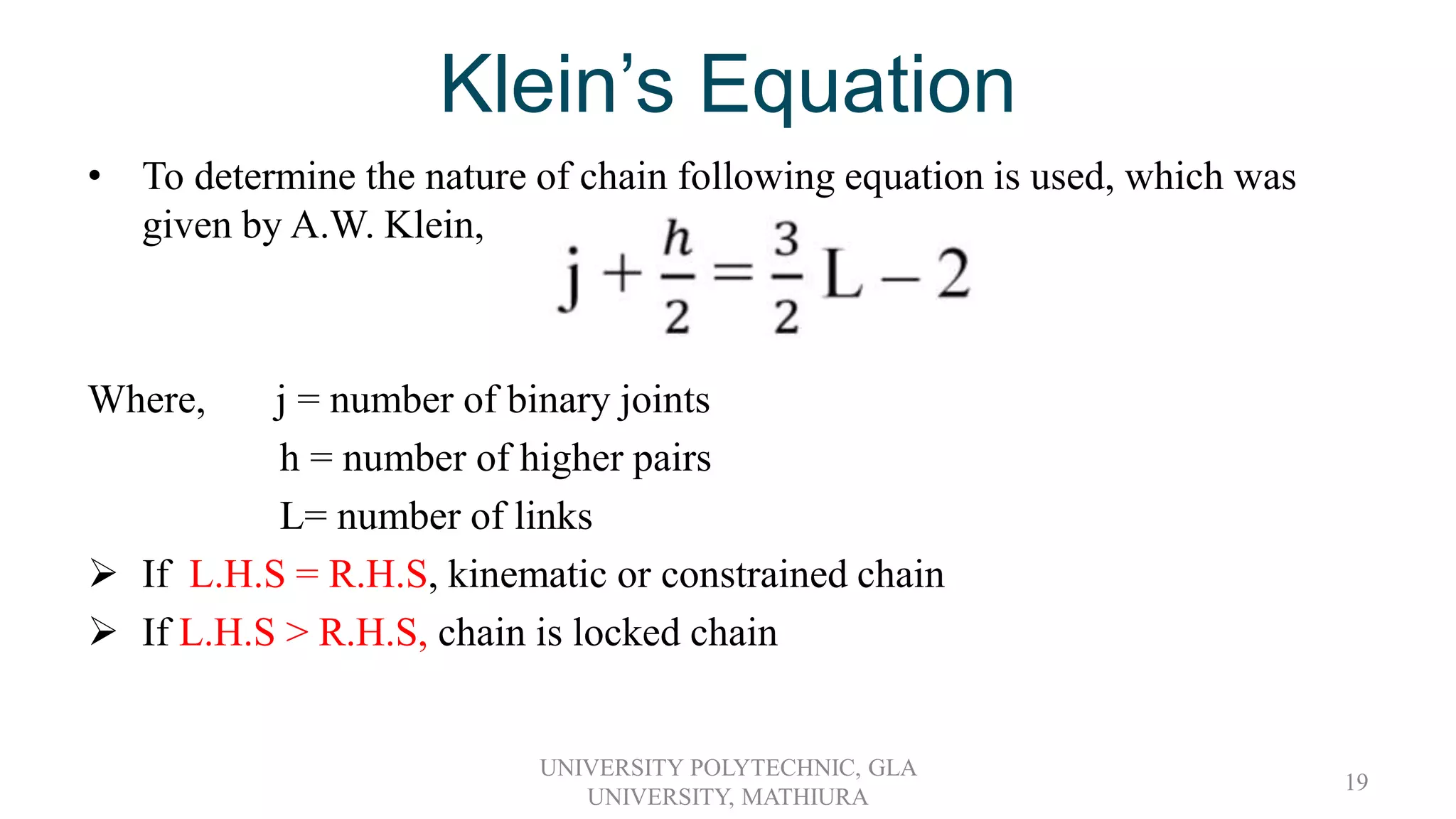
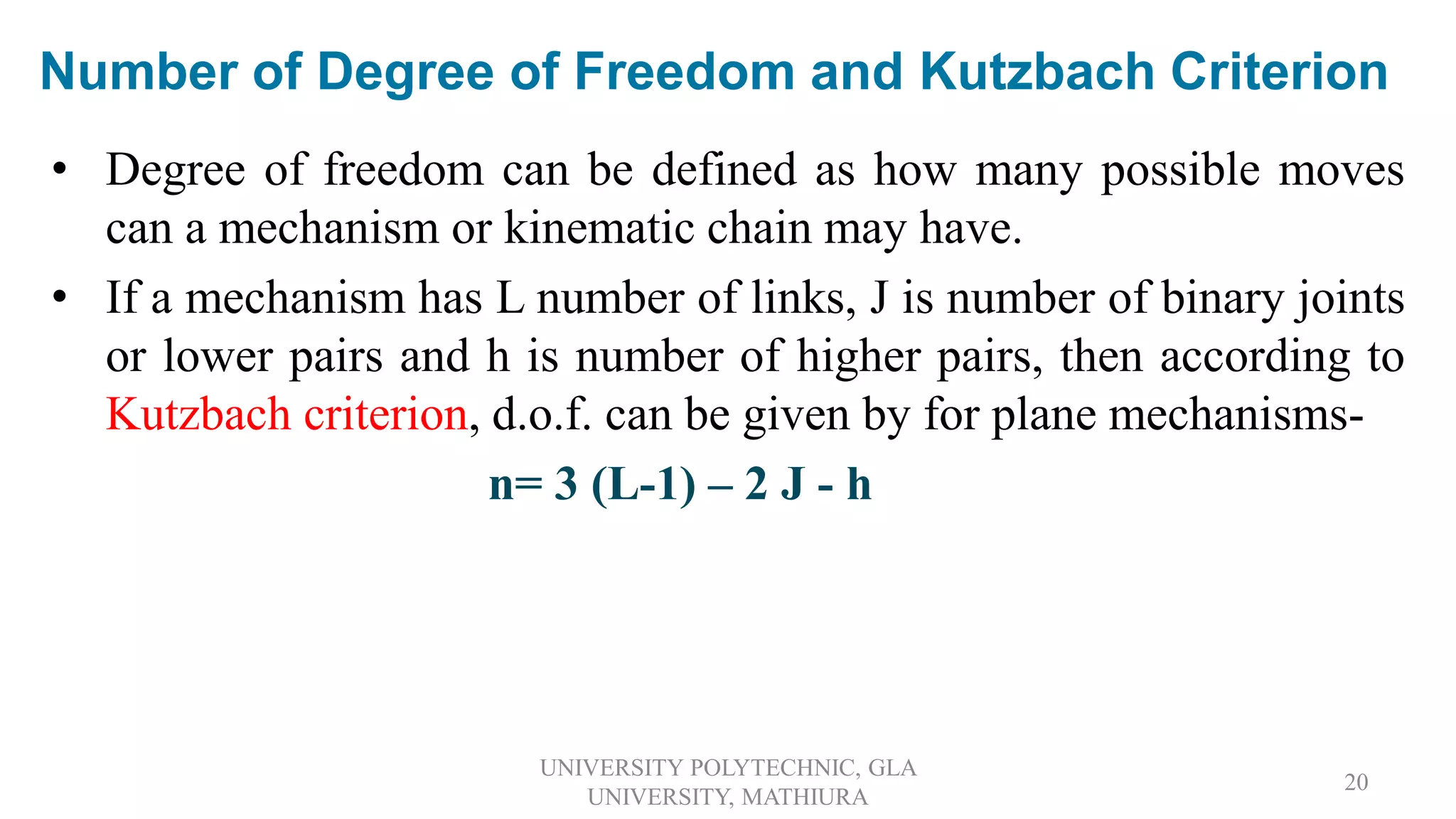

This document provides an overview of kinematic chains and concepts related to their motion analysis including: 1. It defines constrained motion and classifies it as completely, incompletely, and successfully constrained. 2. It introduces kinematic chains, distinguishing between open and closed chains. Formulas are provided to analyze chains using the number of links, joints, and pairs. 3. Common criteria for analyzing kinematic chains are described, including Kutzbach's criterion for determining degrees of freedom and Grubler's criterion for minimum links required for single degree of freedom chains.






















































































