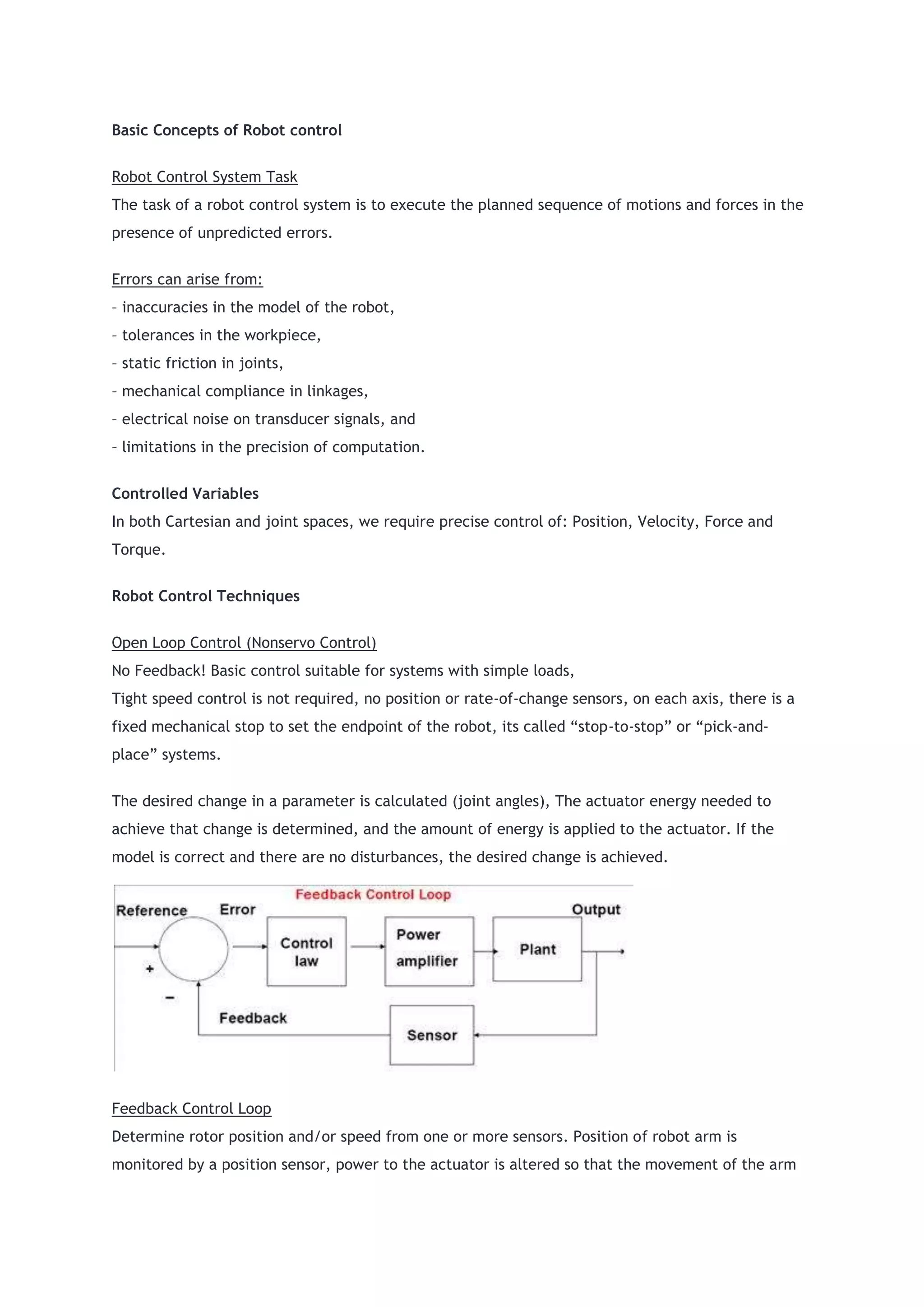
The task of a robot control system is to execute planned motions and forces despite errors from various sources. Control is needed for position, velocity, force and torque in both Cartesian and joint spaces. Open loop control uses no feedback and is suitable only for simple systems, while feedback control monitors position with sensors and alters power to conform to the desired path. Feedforward control predicts actuator settings based on a model, and adaptive control uses feedback to update the model based on previous actions.