Downloaded 3,593 times


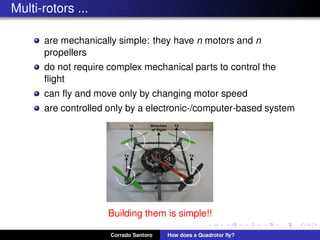

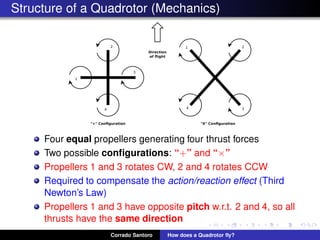

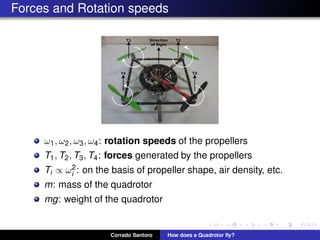

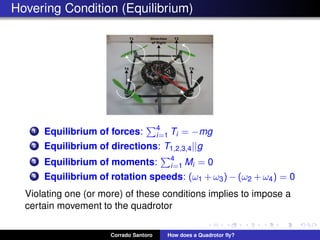


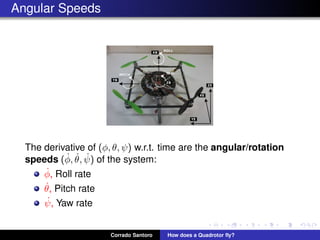









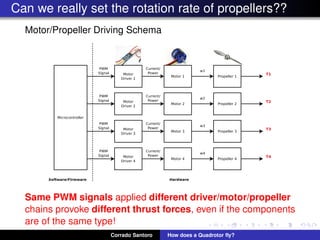






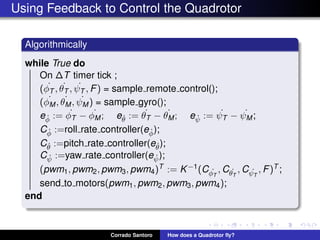
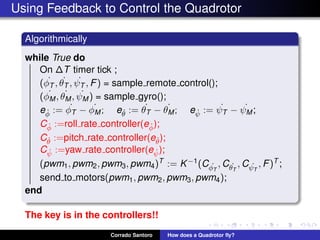




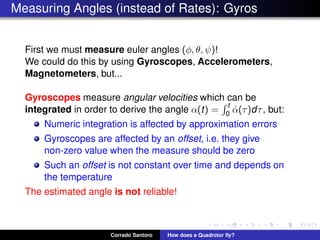





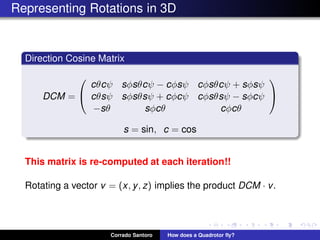
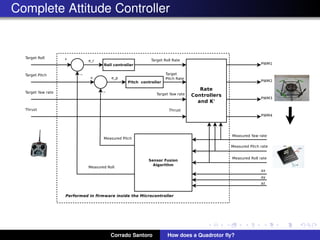









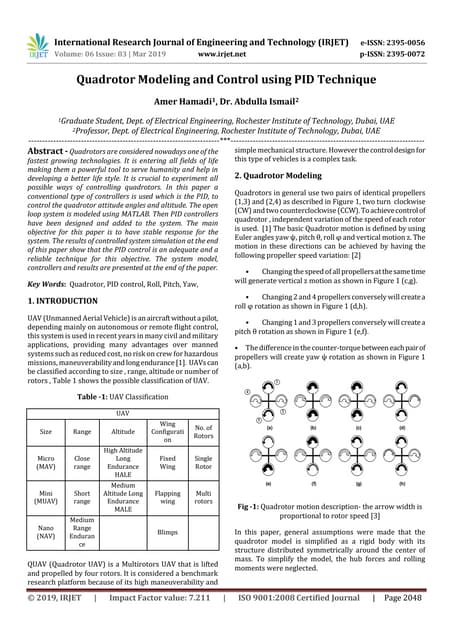
The document discusses how a quadrotor flies through physics, mathematics, control systems, and computer science. It explains that a quadrotor uses four propellers to generate thrust forces for lift and control. The speeds of the four propellers can be varied independently to control the quadrotor's roll, pitch, yaw rates and total thrust based on equations. However, real quadrotors face challenges due to differences in hardware. Control systems using feedback from sensors are needed to achieve reliable control despite uncertainties.