Downloaded 135 times





















![PID CONTROLLER
• PID control is shown in block diagram form in Figure and is
performed in the following steps:
The error e(t) is calculated as Set point – Measured State
The proportional term P is calculated as [Kp * e(t)]
The integral term I is calculated as [KI * 𝑡=0
𝑡=𝑛
e(t)]
The derivative term D is calculated a [KD * (e(t) −e(t))] where e(t) is
previous error value
The 3 terms are summed to produce the controller output, u(t) = P + I + D
• In order to stabilize the quadcopter, a separate PID controller was
implemented for the roll, pitch, and yaw axes.
25](https://image.slidesharecdn.com/quadcopter-161011103403/85/Quadcopter-25-320.jpg)




![References
• [1] RC Helicopter Fun, 2008. Understanding The RC
Quadrocopter / Multi rotor. Retrieved 12th October, 2013.
• [2] Andrew Gibiansky, 2012. Quadcopter Dynamics, Simulation,
and Control. Retrieved 12th October 2013.
• [3] Quadrotors.net, 2012. Why Quadrotors are so Popular for
Research? Retrieved 19th October 2013.
• [4] Czech Technical University, 2011. AR-Drone as a platform for
Robotic Research and education. Prague. Retrieved 19th October
2013.
• [5] IEEE Spectrum, 2011. Pendulum balancing Quadrocopter
learns some new tricks. Retrieved 19th October 2013.
32](https://image.slidesharecdn.com/quadcopter-161011103403/85/Quadcopter-32-320.jpg)


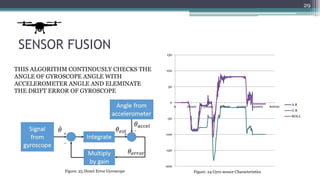
This document summarizes the implementation of a quadcopter with live video monitoring. It discusses the structure of the quadcopter, including its mechanical and electronic components. It also describes the SolidWorks design, MATLAB simulation, control theory using PID controllers, and sensor fusion techniques. The goal is to develop a stable quadcopter that can be flown wirelessly from a distance while transmitting live video footage. Future work may focus on more complex autonomous flight routines and swarm coordination.