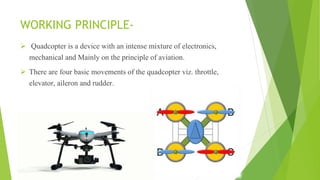
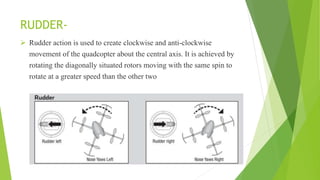
The document presents an overview of quadcopters, also known as drones, detailing their working principles, materials required, and circuit design. It explains the functions of components such as throttle, elevator, aileron, and rudder in controlling movements, along with the importance of lightweight structural materials and powerful motors. Additionally, it highlights applications of quadcopters in military, photography, and inspection tasks.






![BASIC MATERIAL-
Structure
DC Brushless Motors
Propeller
Electronic Speed Controllers [ESC]
KK2.1.5 Circuit Board
2.4 GHz Transmitter And Receiver
Battery 12V,4500mAh Li-Po](https://image.slidesharecdn.com/presentation1-180425191237/85/quadcopter-9-320.jpg)