Download as PDF, PPTX

![Integrating Cloud Services in Behaviour Programming for Autonomous Robots
PROFETA
Basic Entities
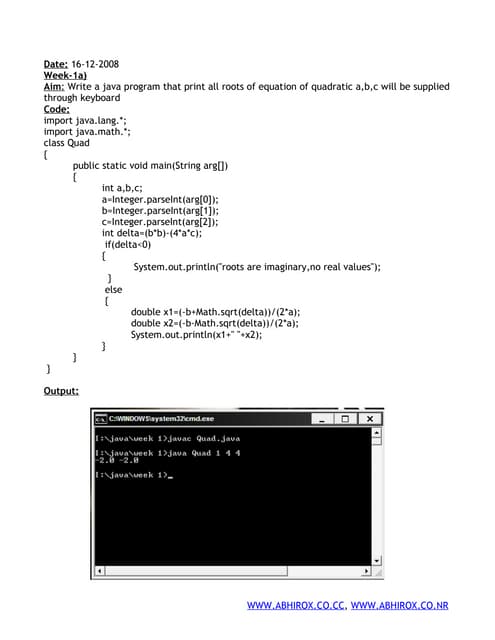
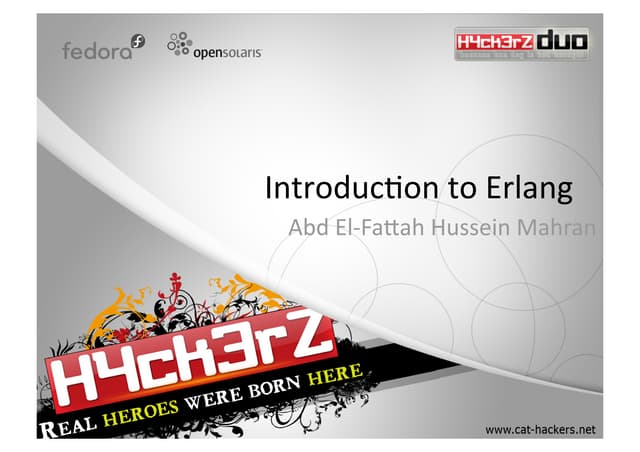
PROFETA Declarative Syntax
A PROFETA behaviour is a set of rules in the form
Event / Condition >> set of Action
where:
Event can be: belief assert or retract, goal achievement
request, goal failure.
Condition refers to a certain state of the knowledge base.
Action can be: belief assert or retract, goal achievement
request, Python expressions, user defined atomic action.
Example:
+object_at("X","Y") / object_got("no") >>
[ move_to("X", "Y"), pick_object() ]
Such expressions are managed thanks to operator
overloading](https://image.slidesharecdn.com/smartcpssantoro-131219052740-phpapp02/85/Integrating-Cloud-Services-in-Behaviour-Programming-for-Autonomous-Robots-7-320.jpg)

![Integrating Cloud Services in Behaviour Programming for Autonomous Robots
PROFETA
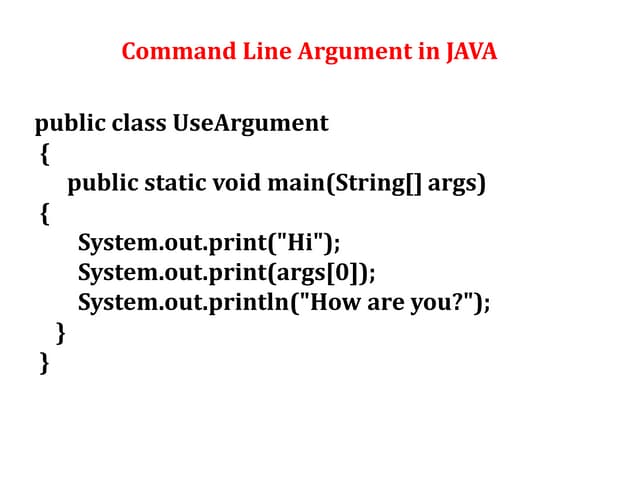
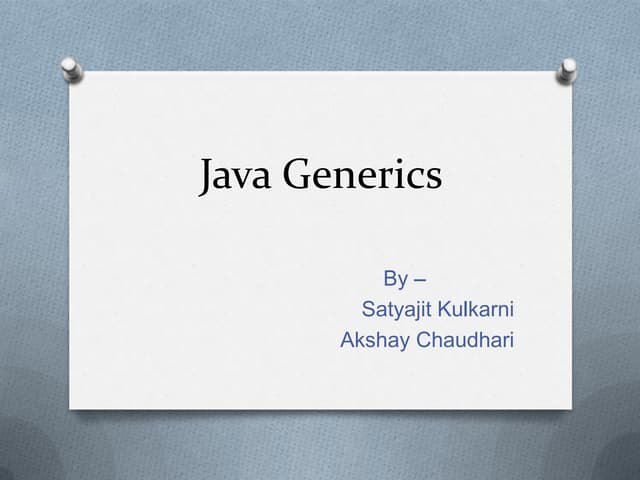
Execution Semantics
PROFETA and the Cloud
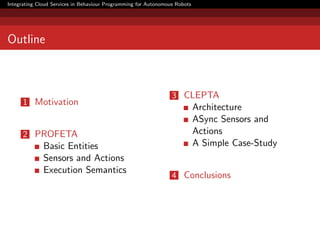
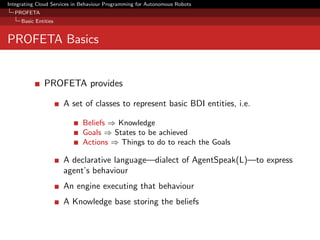
A simple robot which responds to voice commands by using TTS
and STT Cloud services (e.g. Google API).
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
...
class utterance ( Belief ): pass
class move_to ( Action ):
def execute ( self ):
x = self [0]
y = self [1]
# ... perform movement to x , y
class hear ( Sensor ):
def sense ( self ):
command = # sample audio data and invoke STT clould service
return + utterance ( command )
class say ( Action ):
def execute ( self ):
phrase = self [0]
# invoke the TTS could service with " phrase "
+ utterance ( " go " )
>> [ say ( " ok , i ’m going " ) , move_to ( " X " , " Y " ) ]](https://image.slidesharecdn.com/smartcpssantoro-131219052740-phpapp02/85/Integrating-Cloud-Services-in-Behaviour-Programming-for-Autonomous-Robots-11-320.jpg)



![Integrating Cloud Services in Behaviour Programming for Autonomous Robots
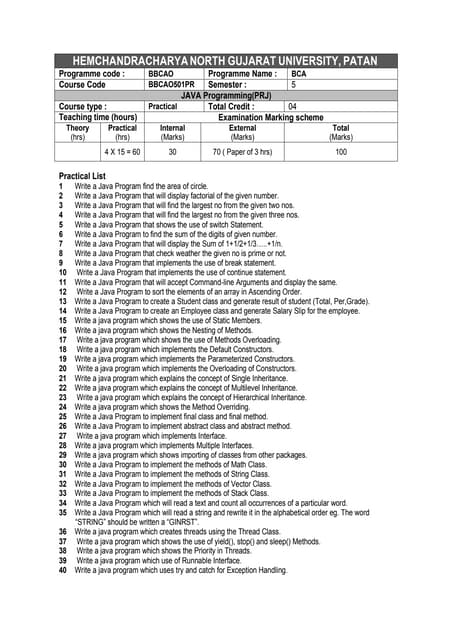
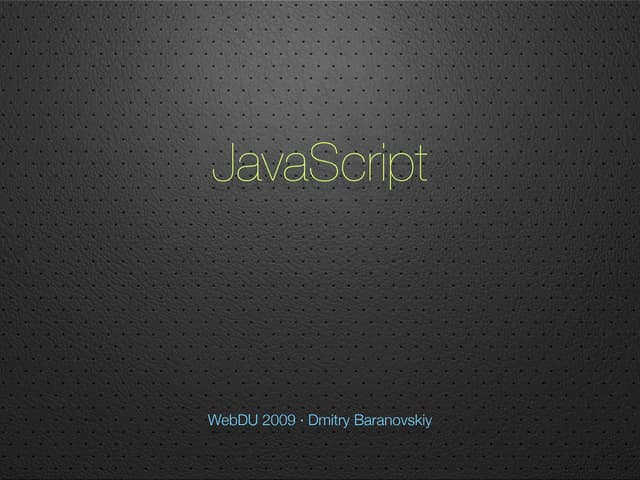
CLEPTA
A Simple Case-Study
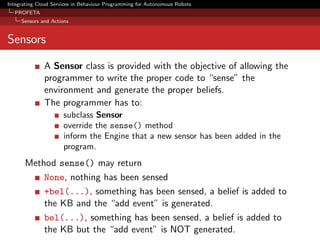
PROFETA + CLEPTA and the Cloud
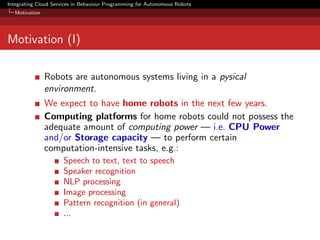
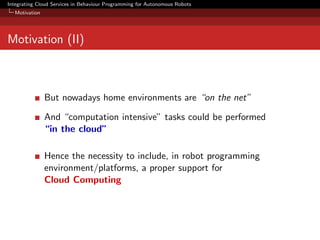
A simple robot which responds to voice commands by using TTS and
STT Cloud services (e.g. Google API).
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
...
class utterance ( Belief ): pass
class say ( AsyncAction ):
def create_service ( self , lang = ’ en ’ ):
return G o og l eT ex t To S pe ec h ( lang ) # provided by CLEPTA
def execute ( self ):
utterance = self [0]
self . async_invoke ( self . get_service (). say , [ utterance ])
class hear ( Sensor ):
def sense ( self ):
command = # sample audio data and invoke STT clould service
return + utterance ( command )
...
PROFETA . add_sensor ( AsyncSensorProxy ( hear ()))
+ utterance ( " go " ) >> [ say ( " ok , i ’m going " ) , .... ]
+ utterance ( " _ " ) >> [ say ( " could you repeat please ? " ) ]](https://image.slidesharecdn.com/smartcpssantoro-131219052740-phpapp02/85/Integrating-Cloud-Services-in-Behaviour-Programming-for-Autonomous-Robots-17-320.jpg)



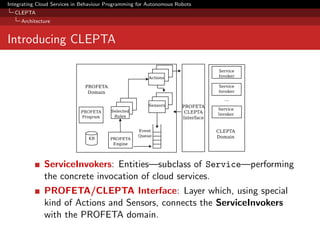
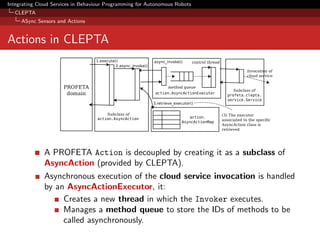
This document discusses integrating cloud services into behavior programming for autonomous robots. It introduces PROFETA, a framework for programming robot behaviors using a BDI model. PROFETA allows defining behaviors with rules but synchronous execution can cause issues for slow cloud services. CLEPTA is introduced as a decoupling layer to asynchronously execute cloud service sensors and actions. It uses service invokers and proxies asynchronous sensors and actions. This allows a robot to respond to voice commands using asynchronous cloud text-to-speech and speech-to-text services.