Download as PDF, PPTX
![Exercise 2: Configuration Function
§
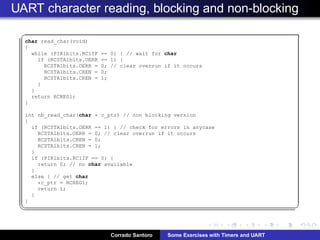
void enter_config(void)
{
char command[40];
printf(CONFIG);
for (;;) {
read_line(command);
if (strcmp(command,end) == 0) {
printf(END OF CONFIGURATIONn);
return;
}
else if (strncmp(command,timeout,7) == 0)
off_timer = atoi(command+7) * 2;
else if (strncmp(command,signal,6) == 0)
signal_timer = atoi(command+6) * 2;
else
printf(Invalid commandn);
}
}
¦ ¥
Corrado Santoro Some Exercises with Timers and UART](https://image.slidesharecdn.com/exercisesmcu-150108034558-conversion-gate01/85/Exercises-with-timers-and-UART-16-320.jpg)
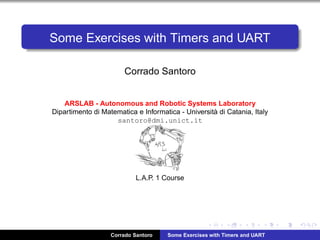

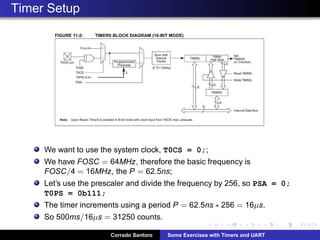
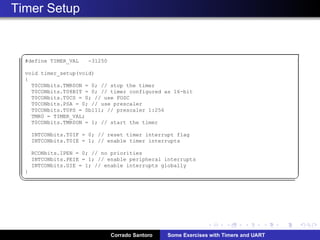
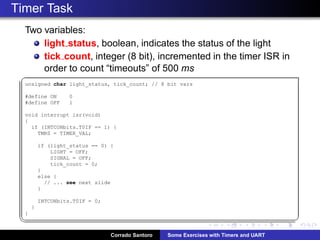
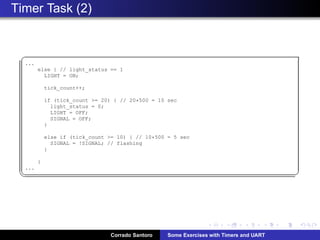
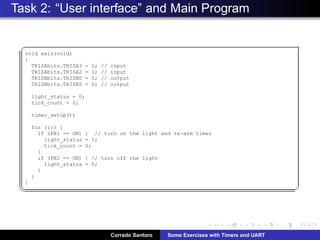
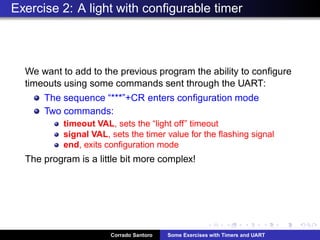
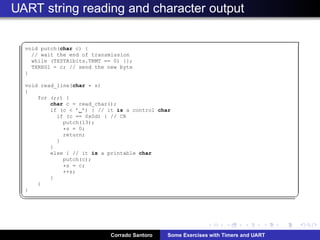
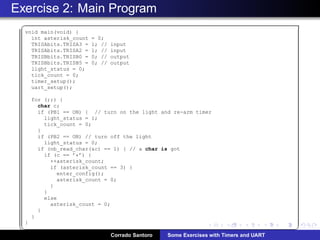
This document describes two exercises using timers and UART on a microcontroller. The first exercise implements a light that turns on with a pushbutton and off automatically after 10 seconds, with a flashing LED indicating when it will turn off. The second exercise adds the ability to configure the timer values through UART commands. It describes the timer, UART, and program setup as well as the main program flow and configuration function.