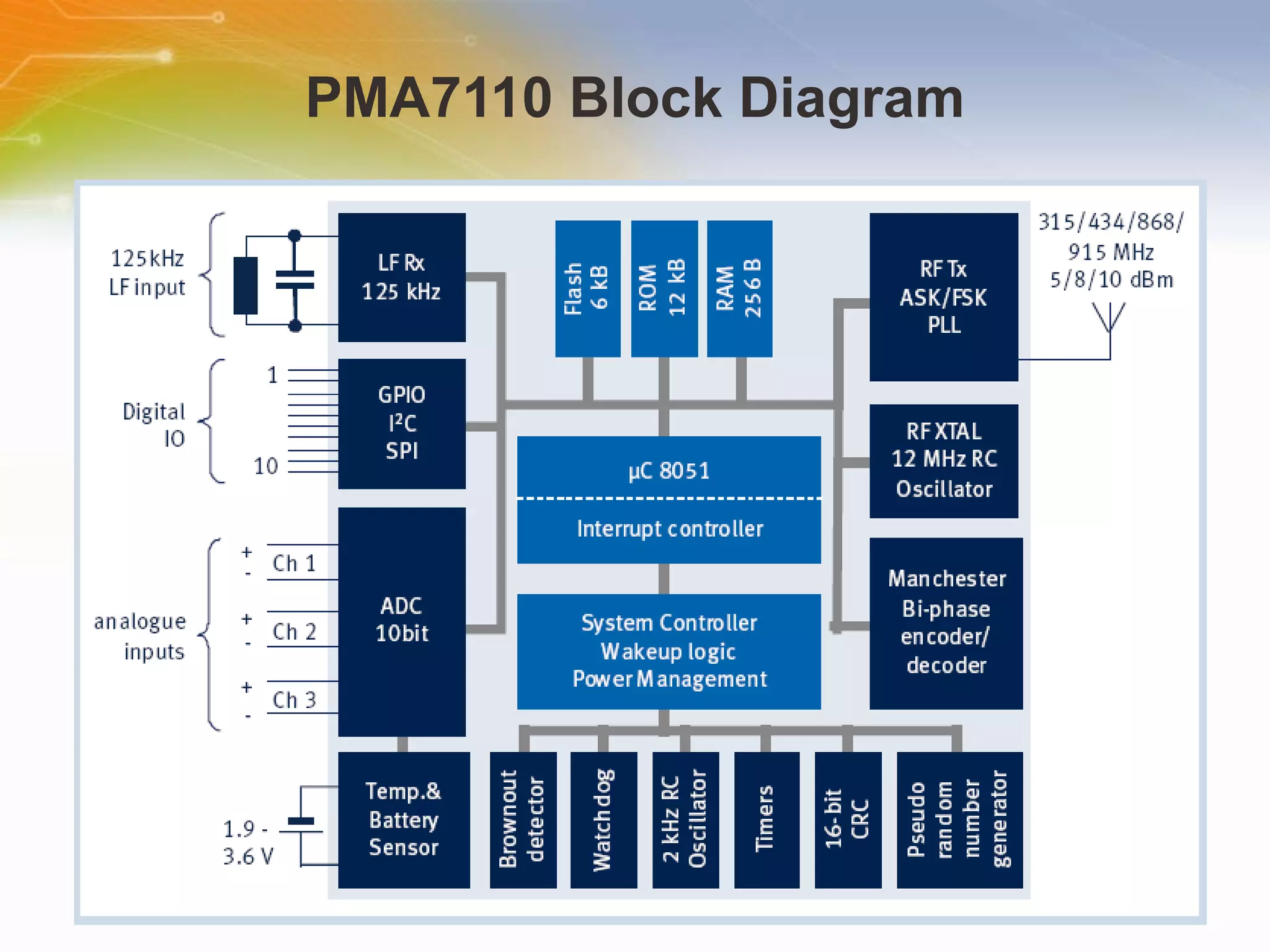
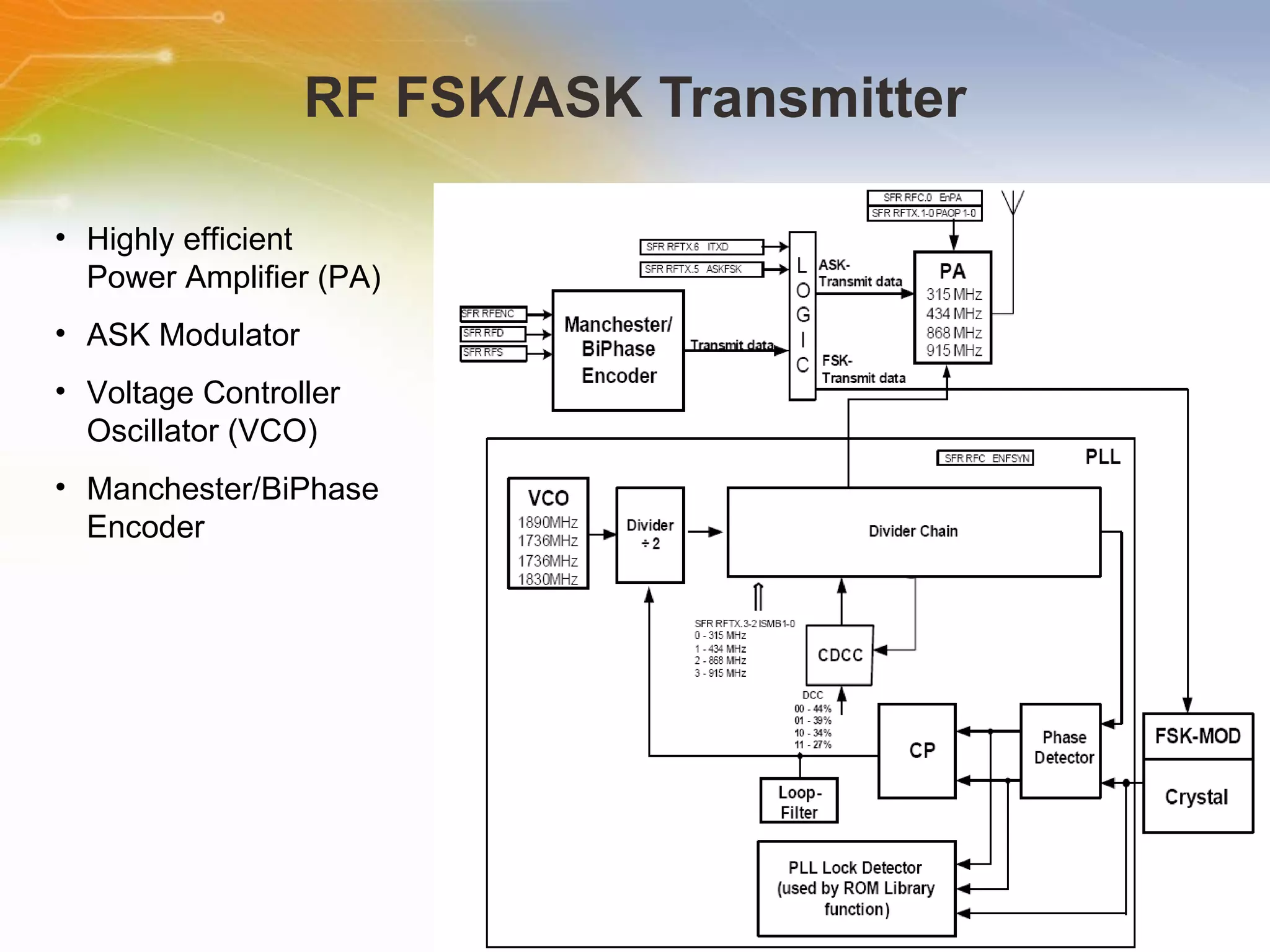





The document introduces the SmartLEWISTM MCU from Infineon, a single chip with an integrated 8051 microcontroller and ASK/FSK multi-band transmitter for sub-1GHz ISM frequency bands. It has flexibility in design, high level integration, and various power and sensor interfaces. Main applications include remote controls, home automation, security systems, and wireless sensor networks.















































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)
![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)



