Download as PDF, PPTX


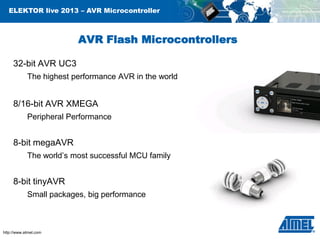
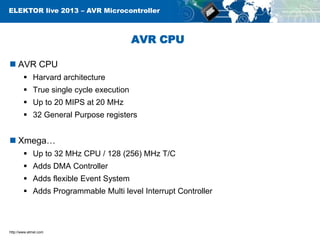
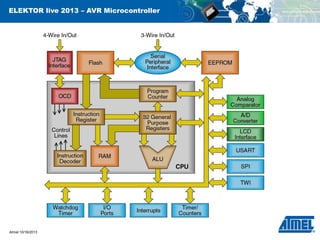
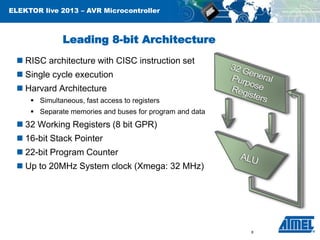
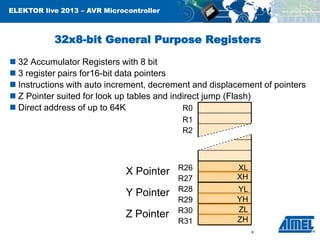
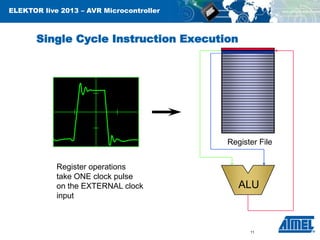


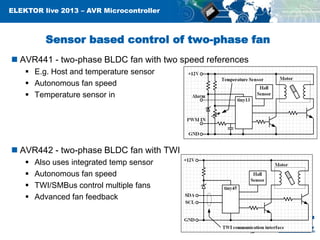
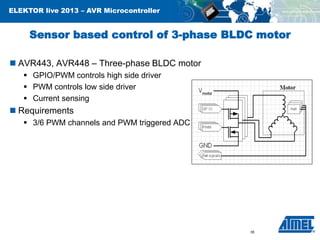
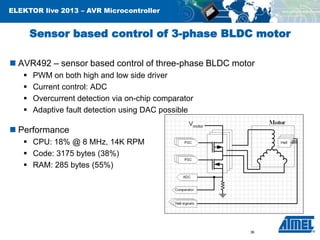
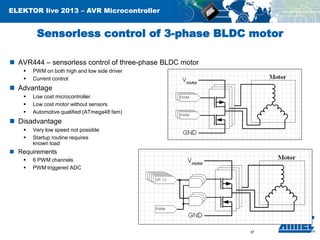
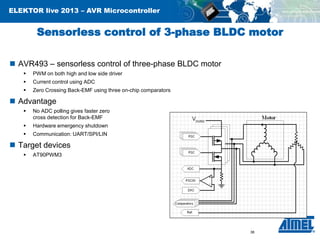
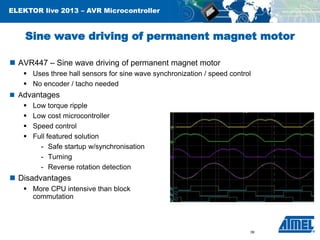
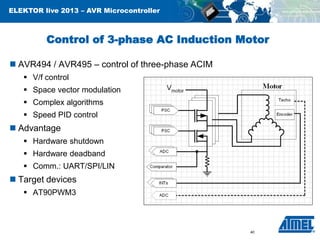
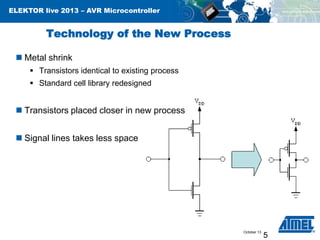
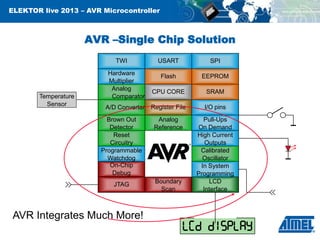






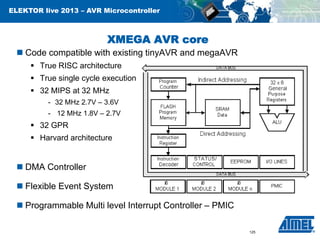




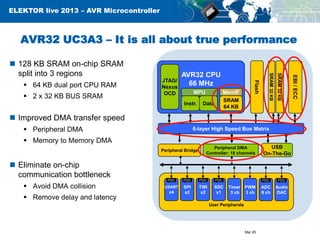





The document summarizes a presentation on AVR microcontrollers. It discusses the AVR family of microcontrollers, highlighting their RISC architecture, 32 general purpose registers, and single cycle instruction execution. It also covers new AVR features, application specific AVRs for tasks like motor control, USB, and CAN, and automotive-qualified AVRs using CMOS process technology.

















































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)






