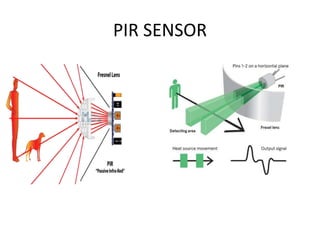
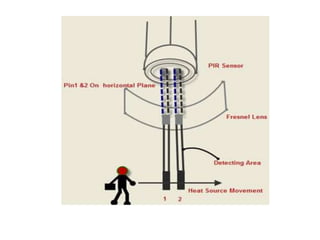
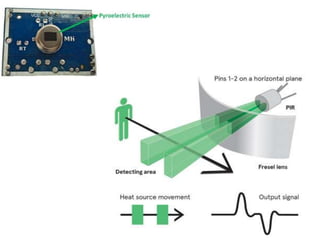
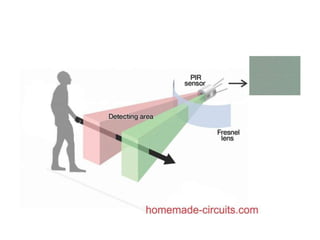
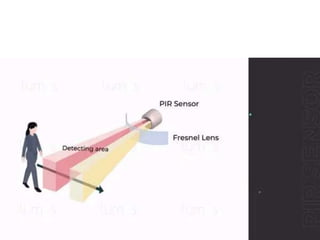
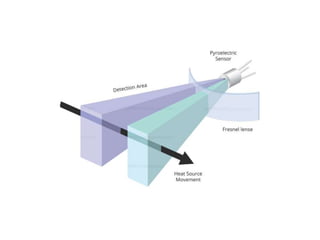
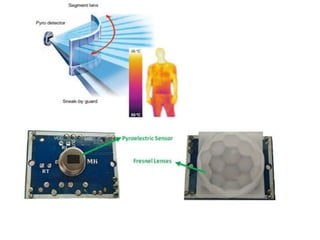
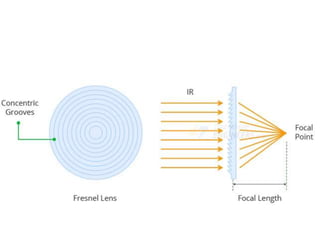
The document discusses PIR sensors and how they work, explaining that PIR sensors can detect infrared radiation from warm bodies like humans and animals moving in their field of view, causing a change in voltage that signals motion. It also describes common applications of PIR sensors in security alarms, motion-activated lighting, and more. The key components of a PIR sensor are a pyroelectric sensor and fresnel lens that focus infrared signals onto the sensor to detect changes from motion.
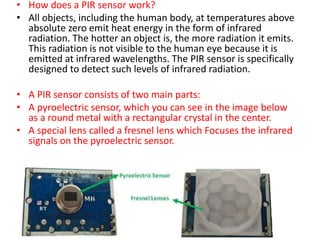
























![Introduction to ESP32 Programming [Road to RIoT 2017]](https://cdn.slidesharecdn.com/ss_thumbnails/roadtoriotsurabayagettingstartedesp32-170726155154-thumbnail.jpg?width=640&height=640&fit=bounds)






















