PID Controller Transfer Function
•
1 like•549 views

Part of Lecture Series on Automatic Control Systems delivered by me to Final year Diploma in Engg. Students. Easy language and Equally useful for higher level.
Report
Share
Report
Share
Download to read offline
![BEE-502
Automatic Control Systems
Unit-5, PID Controller
Diploma in Engg.
(Electrical/ Instr. & Control)
5th Semester
Instructor: Mohd. Umar Rehman
21. 11. 2017
2
( )
o
i
( )
[ ing & i
( )
( )( )
(
ng by
)
]
s
sRC sRC
sC R
R sRC sRC
R sR
s R C s RC RCR
R sR
R RC R
E s Z
E Z
R
C
R C
C
C
C
C
sR
R R sRC
+ +
+ + = ×
+ +
+
=
=
÷
+
=
+
+
=
2
1
2 2 1 1
2 1
2 2 2 1 1
2
1 2 2
2
1 2 1 2 1 1 2 22
1 2 2
2 1 1 2 2
1 1
1 2 2 2 2
1 1
1 1
1
1
where,
KR sR RC RC
R
C
K
CsKRC K R
= + +
+
=2 1 1 1 1 2 2
1 2 2 2 2
1
1
Now, compare this expression with the following expression of TF:
PID P D
I
( ) K sG s K
K s
= + +
1
1
Then, we get the values of the various gains as follows:
P I D
, ,
KR
K
R K
RC
K
KR
K
C
= = =2 1 1
1 2 2
1
►►►▬◄◄◄](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommended
Two Quadrant chopper
This document describes the design and performance study of a two-quadrant chopper drive. It begins with an introduction to choppers and their classification. It then discusses the different types of choppers - first quadrant, second quadrant, two-quadrant types A and B. It outlines the operations carried out by choppers and the components used in the model. Observations from the test circuit are presented along with graphs. Advantages include the ability for forward motoring and braking. Applications include electric vehicles and traction motor control. The conclusion is that regenerative braking is possible using a two-quadrant chopper.
Pwm techniques for converters
Pulse-Width Modulation (PWM) techniques are used to control output voltages of power converters. There are three main PWM methods: Sine PWM uses a reference sine wave compared to a triangular carrier wave to generate PWM signals; Hysteresis PWM uses a feedback control loop with variable switching frequency to maintain output within a hysteresis band; Space Vector PWM approximates the reference voltage vector using combinations of the eight switching states and their durations to reduce harmonic distortion and improve voltage utilization.
Ac single phase
- Any steady state voltage or current in a linear circuit with a sinusoidal source is a sinusoid with the same frequency as the source. Phasors and complex impedances allow conversion of differential equations to circuit analysis by representing magnitude and phase of sinusoids.
- For a resistor, the voltage and current are in phase. In the phasor domain, the resistor phasor relationship is V=IR. In the time domain, the average power dissipated is proportional to the product of RMS current and voltage.
HVDC System
This document provides information about high voltage direct current (HVDC) transmission. It begins with an introduction comparing AC and DC transmission, noting advantages of DC such as fewer conductors required and lack of effects from inductance and capacitance. It then describes types of HVDC links including monopolar, bipolar, and homopolar. Details are given about HVDC converter stations including converter units, valves, transformers, filters, reactive power sources, and smoothing reactors. Multi-terminal HVDC systems and their advantages are outlined. Principles of DC link control through constant current or voltage are summarized.
Svpwm
The document discusses space vector pulse width modulation (SVM) techniques for three-phase voltage source inverters. It explains the principles of SVM including coordinate transformation, reference voltage approximation using switching vectors, and calculation of switching times. Key advantages of SVM over sinusoidal PWM are more efficient voltage utilization and less output harmonic distortion. SVM allows the reference vector locus to reach the maximum circle compared to the inner circle for sinusoidal PWM, improving voltage utilization by around 15%.
Voltage Mode Control of Buck Converter
Voltage Mode Control of Buck Converter (Dec 2012 - April 2013): The Buck-converter converts an input voltage into a lower output voltage, it is also called step-down converter. The buck converter is designed in continuous current conduction mode. To get the regulated output voltage, compensation mechanism using voltage mode control is used. This project involved simulation, design and hardware construction of voltage mode control of buck converter using PID compensator. The error signal is compared with a saw-tooth ramp voltage and desired PWM signal.
• Designed and developed a buck converter circuit using the PID Compensator to get a stable output of 5V-5A from an input of 12V.
• Circuit Simulation using ORCAD (PSpice); Stability analysis of the closed loop system for desired phase and
gain margin using MATLAB; Designed PID compensator by modifying the open loop buck converter circuit obtained by Simulation using ORCAD (PSpice). Implemented Compensator and PWM scheme using NXP LPC1768 Micro-controller.
Basic Configurations of Thyristor Controlled Phase Shifting Transformer or Ph...
Actually it is based on Engineering curriculam & this subjects is mainly taught by B.Tech(EE) & M.Tech(EE-PS & EE-PE&D) Students
Notes nyquist plot and stability criteria
1. The document discusses Nyquist stability criteria and polar plots.
2. Nyquist stability criteria uses Cauchy's argument principle to relate the open-loop transfer function to the poles of the closed-loop characteristic equation.
3. For a system to be stable, the number of counter-clockwise encirclements of the Nyquist plot around the point -1 must equal the number of open-loop poles in the right half plane.
Recommended
Two Quadrant chopper
This document describes the design and performance study of a two-quadrant chopper drive. It begins with an introduction to choppers and their classification. It then discusses the different types of choppers - first quadrant, second quadrant, two-quadrant types A and B. It outlines the operations carried out by choppers and the components used in the model. Observations from the test circuit are presented along with graphs. Advantages include the ability for forward motoring and braking. Applications include electric vehicles and traction motor control. The conclusion is that regenerative braking is possible using a two-quadrant chopper.
Pwm techniques for converters
Pulse-Width Modulation (PWM) techniques are used to control output voltages of power converters. There are three main PWM methods: Sine PWM uses a reference sine wave compared to a triangular carrier wave to generate PWM signals; Hysteresis PWM uses a feedback control loop with variable switching frequency to maintain output within a hysteresis band; Space Vector PWM approximates the reference voltage vector using combinations of the eight switching states and their durations to reduce harmonic distortion and improve voltage utilization.
Ac single phase
- Any steady state voltage or current in a linear circuit with a sinusoidal source is a sinusoid with the same frequency as the source. Phasors and complex impedances allow conversion of differential equations to circuit analysis by representing magnitude and phase of sinusoids.
- For a resistor, the voltage and current are in phase. In the phasor domain, the resistor phasor relationship is V=IR. In the time domain, the average power dissipated is proportional to the product of RMS current and voltage.
HVDC System
This document provides information about high voltage direct current (HVDC) transmission. It begins with an introduction comparing AC and DC transmission, noting advantages of DC such as fewer conductors required and lack of effects from inductance and capacitance. It then describes types of HVDC links including monopolar, bipolar, and homopolar. Details are given about HVDC converter stations including converter units, valves, transformers, filters, reactive power sources, and smoothing reactors. Multi-terminal HVDC systems and their advantages are outlined. Principles of DC link control through constant current or voltage are summarized.
Svpwm
The document discusses space vector pulse width modulation (SVM) techniques for three-phase voltage source inverters. It explains the principles of SVM including coordinate transformation, reference voltage approximation using switching vectors, and calculation of switching times. Key advantages of SVM over sinusoidal PWM are more efficient voltage utilization and less output harmonic distortion. SVM allows the reference vector locus to reach the maximum circle compared to the inner circle for sinusoidal PWM, improving voltage utilization by around 15%.
Voltage Mode Control of Buck Converter
Voltage Mode Control of Buck Converter (Dec 2012 - April 2013): The Buck-converter converts an input voltage into a lower output voltage, it is also called step-down converter. The buck converter is designed in continuous current conduction mode. To get the regulated output voltage, compensation mechanism using voltage mode control is used. This project involved simulation, design and hardware construction of voltage mode control of buck converter using PID compensator. The error signal is compared with a saw-tooth ramp voltage and desired PWM signal.
• Designed and developed a buck converter circuit using the PID Compensator to get a stable output of 5V-5A from an input of 12V.
• Circuit Simulation using ORCAD (PSpice); Stability analysis of the closed loop system for desired phase and
gain margin using MATLAB; Designed PID compensator by modifying the open loop buck converter circuit obtained by Simulation using ORCAD (PSpice). Implemented Compensator and PWM scheme using NXP LPC1768 Micro-controller.
Basic Configurations of Thyristor Controlled Phase Shifting Transformer or Ph...
Actually it is based on Engineering curriculam & this subjects is mainly taught by B.Tech(EE) & M.Tech(EE-PS & EE-PE&D) Students
Notes nyquist plot and stability criteria
1. The document discusses Nyquist stability criteria and polar plots.
2. Nyquist stability criteria uses Cauchy's argument principle to relate the open-loop transfer function to the poles of the closed-loop characteristic equation.
3. For a system to be stable, the number of counter-clockwise encirclements of the Nyquist plot around the point -1 must equal the number of open-loop poles in the right half plane.
Ac voltage controller
AC voltage controllers are thyristor-based devices that can vary the output voltage of an AC supply without changing frequency. They use phase control or integral cycle control strategies to control power flow. Applications include heating, lighting control, and motor speed control. A continuous gating signal is required for full-wave controllers with RL loads to ensure thyristors turn off properly.
Induction Machines.ppt
Three-phase induction motors are commonly used in industry due to their simple and rugged design. They have a wide power rating range and can run at nearly constant speed from no load to full load. An induction motor contains a stationary stator and a revolving rotor. The stator produces a rotating magnetic field which induces a voltage in the rotor windings, generating a torque. Induction motors always run slightly slower than synchronous speed due to slip. They are efficient machines but require a variable frequency drive for variable speed control.
Single Phase Converter
This document summarizes a seminar on single phase converters. It discusses different types of single phase converters including half wave and full wave rectifiers as well as controlled rectifiers using thyristors. It provides equations for calculating the average output voltage and current for resistive and resistive-inductive loads. The operation and triggering of thyristors in a single phase converter is explained. Graphs of input voltage and output voltage and current are shown. The effect of an output inductor and finite commutation interval are also discussed.
1 phase semiconverter
The document discusses a single phase semiconverter circuit used in power electronics. It contains a half bridge configuration with two SCRs and two diodes connected in a bridge. During the positive half cycle, SCR T1 and diode D2 conduct to deliver power to the load. During the negative half cycle, diode D3 and SCR T4 conduct. Waveforms and examples with resistive, inductive, and resistive-inductive-emissive loads are provided.
Unit 1 Power System Stability
1. The document discusses power system stability, including classifications of power system states as steady state, dynamic state, and transient state.
2. It describes synchronous machine swing equation and power angle equation, which relate the mechanical power input to the electrical power output of a generator through the power/torque angle.
3. An example calculation is shown to find the steady state power limit of a power system with a generator connected to an infinite bus through a transmission line.
Current Transformer and Potential Transformer
One of the major difference between them is that the current transformer converts the high value of current into low value whereas the potential or voltage transformer converts the high value of voltages into low voltage.
Signal flow graph Mason’s Gain Formula
The document discusses signal flow graphs (SFGs), which are diagrams that represent sets of simultaneous equations. SFGs consist of nodes connected by directed branches, with branches representing the flow of signals between nodes. Key terms are defined, such as transmittance (branch gain), paths, loops, and Mason's gain formula, which is used to reduce an SFG to a single transfer function. Examples are given of constructing SFGs from block diagrams, simultaneous equations, and differential equations. The document also discusses identifying loops and applying Mason's formula to solve problems represented by SFGs.
Chapter 20
The document discusses quasi-resonant converters and the half-wave zero-current-switching quasi-resonant switch cell. The switch cell uses a small resonant inductor and capacitor to achieve zero-current switching of the transistor. It operates in four subintervals per switching period: 1) transistor on, 2) resonant ringing, 3) capacitor discharging, 4) diode on. Mathematical analysis determines the waveforms and durations of each subinterval. Averaging the switch cell currents and voltages gives the conversion ratio, allowing the cell to be analyzed and incorporated into converter circuits.
Active_Power_Filter
This document defines power quality and current harmonics. It discusses passive filters and active power filters, including voltage sourced and current sourced active power filters. Active power filters are compared to passive filters, noting active filters' advantages in eliminating any harmonics without tuning, but their higher cost and complexity. The document concludes by describing the Denizli-2 active power filter application in Turkey, which uses a current sourced converter design to filter 5th harmonics at a 5 MVA installation.
Parallel Operation of Transformers
This document discusses the parallel operation of transformers with equal and unequal voltage ratios. It notes that for parallel operation, transformers must have equal voltage ratios, impedances, polarities, phase sequences, ratings, and frequencies. It explains that with unequal ratios, a circulating current will occur under no load conditions due to the difference in induced voltages. The document also states that with equal ratios and in-phase voltages, the primaries and secondaries can be connected in parallel without circulating current under no load.
controlled rectifiers
The document summarizes a seminar presentation on AC-DC converters given by Ankur Mahajan. The presentation covered single phase half wave and full wave converters. It discussed various rectifier types including uncontrolled, half controlled, and fully controlled bridges. It provided calculations for average and RMS voltage values for different converter configurations under resistive and inductive loads. The presentation also covered single phase half controlled and fully controlled bridge converters in both continuous and discontinuous conduction modes.
AC AC converters
Introduction
The Single Phase AC Voltage Controller
The Three Phase AC Voltage Controller – Y Connected Resistive Load
Diode circuits
This document discusses semiconductor diodes and rectifiers. It begins by explaining the physical principles of semiconductors, including intrinsic semiconductors and how doping with materials like phosphorus or boron creates n-type and p-type semiconductors. When a p-type and n-type material meet, it forms a pn junction with interesting electrical properties. Diodes are made from pn junctions and exhibit asymmetric conduction, allowing current in one direction but blocking it in the other. Diode circuits and models are also covered, along with important applications like rectification where diodes are used to convert AC to DC power.
Dc to Dc Converter (chopper)
DC to DC converters, also known as choppers, are used to obtain a variable DC output voltage from a constant DC source. They offer benefits like greater efficiency, faster response, smaller size, and smooth control. Choppers control the output voltage through either pulse width modulation, keeping the frequency constant and varying the ON time, or variable frequency control. The document then describes various chopper circuits like buck, boost, and buck-boost converters. It also explains different types of choppers - Types A to E - which operate in the first, second, third or fourth quadrants depending on whether the average output voltage and current are positive or negative.
Generation of High D.C. Voltage (HVDC generation)
Generation of high dc voltage using different methods like half wave and full wave rectifier, voltage doubler circuits, voltage multiplier circuits, cockcroft-walton circuits and van de graaff generators.
Three phase transformers
This document discusses various types of three-phase transformer connections including:
- Delta-delta, which produces no phase shift between input and output voltages.
- Delta-wye, which produces a 30 degree phase shift.
- Wye-delta, which also produces a 30 degree phase shift with primary and secondary connections reversed from delta-wye.
- Wye-wye requires special precautions like connecting the neutral or using a tertiary winding to prevent voltage distortion.
- Open-delta can transform voltage using only two transformers in an emergency situation but has lower capacity.
- Autotransformers are more economical than conventional transformers for moderate voltage changes between 0.5-2 times.
INCIDENCE MATRIX
The document describes modeling a power system network using an admittance matrix formulation. Key points:
1) Branches are modeled as admittances to relate voltage and current. The admittance matrix (Y-bus) is formed with diagonal elements equal to the sum of incident branch admittances and off-diagonals equal to the negative of branch admittances.
2) Kirchhoff's and Ohm's laws are used to write equations relating bus voltages and branch currents.
3) Simplifying assumptions are made to develop the "DC power flow" equations, including ignoring voltage magnitudes and angles and resistance. This leads to a linear relationship between bus voltage angles and real power injections
Power Electronics-Introduction
Introduction to Power Electronics, Power Diodes, Thyristors and Power Transistors. Different types of Power Converters, Applications of Power Electronics and Peripheral effects.
Topic 2 - Switch Realization.pptx
The document discusses switch realization in power electronics. It begins with an overview of single-, two-, and four-quadrant switches and applications. It then surveys common power semiconductor devices used to realize switches, including diodes, MOSFETs, BJTs, IGBTs, and thyristors. Key aspects of transistor switching losses are examined for a clamped inductive load. Recovered charge in power diodes is also discussed. Realization of different types of switches using these devices is explored through examples like buck converters.
New controllers efficient model based design method
This document proposes new methods for designing P, PI, PD, and PID controllers based on selecting the controller gains based on the plant's parameters. The goal is to achieve acceptable stability and medium fast response. Expressions are proposed for calculating the controller gains for first-order, second-order, and time-delay systems based on the plant's time constant, damping ratio, and natural frequency. The proposed controller design methods are tested on first, second, and first-order systems with time delay using MATLAB/Simulink. The results show the methods can achieve acceptable stability and medium fast response with minimum steady state error by selecting a single tuning parameter.
Chapter10
This document provides an overview of time-domain analysis and design of control systems. It discusses block diagrams and their simplification through reduction rules. Transient response specifications for control systems are defined, including delay time, rise time, peak time, maximum overshoot, and settling time. The transient response of second-order systems to a unit step input is analyzed. Factors that affect transient response such as damping ratio are explained. Formulas for calculating delay time and rise time of a second-order system based on its damping ratio and natural frequency are also presented.
More Related Content
What's hot
Ac voltage controller
AC voltage controllers are thyristor-based devices that can vary the output voltage of an AC supply without changing frequency. They use phase control or integral cycle control strategies to control power flow. Applications include heating, lighting control, and motor speed control. A continuous gating signal is required for full-wave controllers with RL loads to ensure thyristors turn off properly.
Induction Machines.ppt
Three-phase induction motors are commonly used in industry due to their simple and rugged design. They have a wide power rating range and can run at nearly constant speed from no load to full load. An induction motor contains a stationary stator and a revolving rotor. The stator produces a rotating magnetic field which induces a voltage in the rotor windings, generating a torque. Induction motors always run slightly slower than synchronous speed due to slip. They are efficient machines but require a variable frequency drive for variable speed control.
Single Phase Converter
This document summarizes a seminar on single phase converters. It discusses different types of single phase converters including half wave and full wave rectifiers as well as controlled rectifiers using thyristors. It provides equations for calculating the average output voltage and current for resistive and resistive-inductive loads. The operation and triggering of thyristors in a single phase converter is explained. Graphs of input voltage and output voltage and current are shown. The effect of an output inductor and finite commutation interval are also discussed.
1 phase semiconverter
The document discusses a single phase semiconverter circuit used in power electronics. It contains a half bridge configuration with two SCRs and two diodes connected in a bridge. During the positive half cycle, SCR T1 and diode D2 conduct to deliver power to the load. During the negative half cycle, diode D3 and SCR T4 conduct. Waveforms and examples with resistive, inductive, and resistive-inductive-emissive loads are provided.
Unit 1 Power System Stability
1. The document discusses power system stability, including classifications of power system states as steady state, dynamic state, and transient state.
2. It describes synchronous machine swing equation and power angle equation, which relate the mechanical power input to the electrical power output of a generator through the power/torque angle.
3. An example calculation is shown to find the steady state power limit of a power system with a generator connected to an infinite bus through a transmission line.
Current Transformer and Potential Transformer
One of the major difference between them is that the current transformer converts the high value of current into low value whereas the potential or voltage transformer converts the high value of voltages into low voltage.
Signal flow graph Mason’s Gain Formula
The document discusses signal flow graphs (SFGs), which are diagrams that represent sets of simultaneous equations. SFGs consist of nodes connected by directed branches, with branches representing the flow of signals between nodes. Key terms are defined, such as transmittance (branch gain), paths, loops, and Mason's gain formula, which is used to reduce an SFG to a single transfer function. Examples are given of constructing SFGs from block diagrams, simultaneous equations, and differential equations. The document also discusses identifying loops and applying Mason's formula to solve problems represented by SFGs.
Chapter 20
The document discusses quasi-resonant converters and the half-wave zero-current-switching quasi-resonant switch cell. The switch cell uses a small resonant inductor and capacitor to achieve zero-current switching of the transistor. It operates in four subintervals per switching period: 1) transistor on, 2) resonant ringing, 3) capacitor discharging, 4) diode on. Mathematical analysis determines the waveforms and durations of each subinterval. Averaging the switch cell currents and voltages gives the conversion ratio, allowing the cell to be analyzed and incorporated into converter circuits.
Active_Power_Filter
This document defines power quality and current harmonics. It discusses passive filters and active power filters, including voltage sourced and current sourced active power filters. Active power filters are compared to passive filters, noting active filters' advantages in eliminating any harmonics without tuning, but their higher cost and complexity. The document concludes by describing the Denizli-2 active power filter application in Turkey, which uses a current sourced converter design to filter 5th harmonics at a 5 MVA installation.
Parallel Operation of Transformers
This document discusses the parallel operation of transformers with equal and unequal voltage ratios. It notes that for parallel operation, transformers must have equal voltage ratios, impedances, polarities, phase sequences, ratings, and frequencies. It explains that with unequal ratios, a circulating current will occur under no load conditions due to the difference in induced voltages. The document also states that with equal ratios and in-phase voltages, the primaries and secondaries can be connected in parallel without circulating current under no load.
controlled rectifiers
The document summarizes a seminar presentation on AC-DC converters given by Ankur Mahajan. The presentation covered single phase half wave and full wave converters. It discussed various rectifier types including uncontrolled, half controlled, and fully controlled bridges. It provided calculations for average and RMS voltage values for different converter configurations under resistive and inductive loads. The presentation also covered single phase half controlled and fully controlled bridge converters in both continuous and discontinuous conduction modes.
AC AC converters
Introduction
The Single Phase AC Voltage Controller
The Three Phase AC Voltage Controller – Y Connected Resistive Load
Diode circuits
This document discusses semiconductor diodes and rectifiers. It begins by explaining the physical principles of semiconductors, including intrinsic semiconductors and how doping with materials like phosphorus or boron creates n-type and p-type semiconductors. When a p-type and n-type material meet, it forms a pn junction with interesting electrical properties. Diodes are made from pn junctions and exhibit asymmetric conduction, allowing current in one direction but blocking it in the other. Diode circuits and models are also covered, along with important applications like rectification where diodes are used to convert AC to DC power.
Dc to Dc Converter (chopper)
DC to DC converters, also known as choppers, are used to obtain a variable DC output voltage from a constant DC source. They offer benefits like greater efficiency, faster response, smaller size, and smooth control. Choppers control the output voltage through either pulse width modulation, keeping the frequency constant and varying the ON time, or variable frequency control. The document then describes various chopper circuits like buck, boost, and buck-boost converters. It also explains different types of choppers - Types A to E - which operate in the first, second, third or fourth quadrants depending on whether the average output voltage and current are positive or negative.
Generation of High D.C. Voltage (HVDC generation)
Generation of high dc voltage using different methods like half wave and full wave rectifier, voltage doubler circuits, voltage multiplier circuits, cockcroft-walton circuits and van de graaff generators.
Three phase transformers
This document discusses various types of three-phase transformer connections including:
- Delta-delta, which produces no phase shift between input and output voltages.
- Delta-wye, which produces a 30 degree phase shift.
- Wye-delta, which also produces a 30 degree phase shift with primary and secondary connections reversed from delta-wye.
- Wye-wye requires special precautions like connecting the neutral or using a tertiary winding to prevent voltage distortion.
- Open-delta can transform voltage using only two transformers in an emergency situation but has lower capacity.
- Autotransformers are more economical than conventional transformers for moderate voltage changes between 0.5-2 times.
INCIDENCE MATRIX
The document describes modeling a power system network using an admittance matrix formulation. Key points:
1) Branches are modeled as admittances to relate voltage and current. The admittance matrix (Y-bus) is formed with diagonal elements equal to the sum of incident branch admittances and off-diagonals equal to the negative of branch admittances.
2) Kirchhoff's and Ohm's laws are used to write equations relating bus voltages and branch currents.
3) Simplifying assumptions are made to develop the "DC power flow" equations, including ignoring voltage magnitudes and angles and resistance. This leads to a linear relationship between bus voltage angles and real power injections
Power Electronics-Introduction
Introduction to Power Electronics, Power Diodes, Thyristors and Power Transistors. Different types of Power Converters, Applications of Power Electronics and Peripheral effects.
Topic 2 - Switch Realization.pptx
The document discusses switch realization in power electronics. It begins with an overview of single-, two-, and four-quadrant switches and applications. It then surveys common power semiconductor devices used to realize switches, including diodes, MOSFETs, BJTs, IGBTs, and thyristors. Key aspects of transistor switching losses are examined for a clamped inductive load. Recovered charge in power diodes is also discussed. Realization of different types of switches using these devices is explored through examples like buck converters.
What's hot (20)
Similar to PID Controller Transfer Function
New controllers efficient model based design method
This document proposes new methods for designing P, PI, PD, and PID controllers based on selecting the controller gains based on the plant's parameters. The goal is to achieve acceptable stability and medium fast response. Expressions are proposed for calculating the controller gains for first-order, second-order, and time-delay systems based on the plant's time constant, damping ratio, and natural frequency. The proposed controller design methods are tested on first, second, and first-order systems with time delay using MATLAB/Simulink. The results show the methods can achieve acceptable stability and medium fast response with minimum steady state error by selecting a single tuning parameter.
Chapter10
This document provides an overview of time-domain analysis and design of control systems. It discusses block diagrams and their simplification through reduction rules. Transient response specifications for control systems are defined, including delay time, rise time, peak time, maximum overshoot, and settling time. The transient response of second-order systems to a unit step input is analyzed. Factors that affect transient response such as damping ratio are explained. Formulas for calculating delay time and rise time of a second-order system based on its damping ratio and natural frequency are also presented.
1.[1 5]implementation of pre compensation fuzzy for a cascade pid controller ...
1) The document describes a fuzzy logic-based pre-compensation scheme for a PID controller to improve its performance for processes with nonlinear dynamics.
2) A fuzzy pre-compensator uses error and change in error as inputs to generate a correction term that is added to the controller command signal.
3) 47 fuzzy rules are used in the pre-compensator to modify the command signal and compensate for overshoot and undershoot based on the current error and error change.
4) Simulation results show that the fuzzy pre-compensated PID controller provides better response and disturbance rejection compared to a conventional PID controller.
Routh Hurwitz contd
Part of Lecture Series on Automatic Control Systems delivered by me to Final year Diploma in Engg. Students. Easy language and Equally useful for higher level.
IRJET- Speed Control of Induction Motor using Hybrid PID Fuzzy Controller
This document presents a study on using a hybrid PID fuzzy controller with a BAT optimization algorithm to control the speed of an induction motor. It begins with background on PID controllers and fuzzy logic controllers. It then proposes using a BAT algorithm to select the Kp and Ki parameters of a PI controller to regulate motor speed. The results show that the proposed BAT-PID controller reduces speed fluctuations and settling time compared to a traditional PID controller. In conclusion, the hybrid fuzzy-PID controller with BAT optimization improves induction motor speed control.
Design of Adaptive Sliding Mode Control with Fuzzy Controller and PID Tuning ...
This document presents a control system that combines fuzzy sliding mode control and PID tuning to control uncertain systems. A fuzzy logic controller is proposed using two inputs (error and derivative of error) and simple membership functions and rules. An adaptive sliding mode controller with PID tuning is also designed. The PID gains are systematically and continuously updated according to adaptive laws. This combined fuzzy sliding mode controller with PID tuning is applied to control a brushless DC motor. Simulation results show the system achieves good trajectory tracking performance while eliminating chattering through the use of a boundary layer.
A simplified method of designing a phase lead compensator to improve the m-s-...
1. The document describes a method for designing a phase-lead compensator to improve the phase margin of a mass-spring-damper system.
2. The steps taken are to determine the current phase margin, calculate the difference to the desired margin, design the compensator transfer function, and verify that the compensated system meets requirements.
3. Using this method, a phase-lead compensator with a transfer function of 1+0.42S/(1+0.14S) is designed, and the compensated system is verified to have a phase margin of 45 degrees as required.
A simplified method of designing a phase lead compensator to improve the m-s-...
Abstract In this study, based on the unconstrained third order shear deformation theory (UTSDT), numerical analysis of an axisymmetric bending and stresses of circular plate are investigated. The material properties are considerd to graded through the thickness of the verticlecoordinate, and follow a simple power of volume fraction of the constituents.governing equations are derived and DQM is used as an efficient numerical method for solving the differential equations.Two types of boundary conditions under the influence of the bending and body force are studied. The validation of the results is done by a comparison with another study ,which available in the literature and found good agreement between two studies. Index Terms:bending,shearstress,circularplate,UTSDT,GDQM.
Control tutorials for matlab and simulink introduction pid controller desig...
This document introduces PID (proportional-integral-derivative) controllers and how they can be used to improve closed-loop system performance. It describes how each of the P, I, and D terms affect rise time, overshoot, settling time, and steady-state error. An example using a mass-spring-damper system demonstrates how to design PID controllers manually and use MATLAB's automatic tuning tools to design controllers. The document provides guidelines for designing PID controllers and introduces PID controller objects and functions in MATLAB.
Hg2412901297
IJERA (International journal of Engineering Research and Applications) is International online, ... peer reviewed journal. For more detail or submit your article, please visit www.ijera.com
Speed control of dc motor using relay feedback tuned pi
This document discusses speed control of a DC motor using different controller types, including a relay feedback tuned PI controller, fuzzy PI controller (FPIC), and self-tuned fuzzy PI controller (STFPIC). The FPIC and STFPIC are developed using fuzzy logic to overcome limitations of conventional PID controllers for nonlinear systems without an accurate mathematical model. An experimental setup is used to test the controllers' performance on a DC motor. Results show the model-independent STFPIC and FPIC controllers improve speed control performance compared to the relay-tuned PI controller.
PID Controller Simulator Design for Polynomials Transfer Function
PID Controller Simulator Design for Polynomials Transfer Function
Objective:
• To compute responses at different values of PID for a transfer function for both open
loop and Closed Loop Simulation
D0255033039
This document summarizes a research paper on using fuzzy logic to control the speed of a DC motor. It begins by describing the objectives of designing a high-current driver circuit for the motor and using an efficient fuzzy logic algorithm to accurately track motor velocity. It then provides mathematical analysis of the separately excited DC motor and describes implementing a fuzzy logic controller using FPGA. Membership functions, rule inference, and defuzzification are implemented in VHDL. Feedback is provided by an optical encoder to measure motor speed. Simulation results show the fuzzy controller can accurately control motor speed. In conclusion, the fuzzy logic approach provides an efficient and accurate method for DC motor speed control that does not require an accurate mathematical model of the motor.
Paper id 24201493
This document compares the performance of indirect vector control of an induction motor using proportional-integral (PI) and proportional-integral-derivative (PID) speed controllers. It first provides background on induction motors, vector control techniques, and PI/PID controllers. It then presents the simulation model and results, which show the PID controller provides better speed response characteristics like shorter settling time. In conclusion, the PID controller improves the speed performance for indirect vector control of an induction motor drive.
Improving Structural Limitations of Pid Controller For Unstable Processes
PID controllers have structural limitations which make it impossible for a good closed-loop performance to be achieved. A step response with high overshoot and oscillations always results. In controlling processes with resonances, integrators and unstable transfer functions, the PI-PD controller provides a satisfactory closed-loop performance. In this paper, a simple approach to extracting parameters of a PI-PD controller from parameters of the conventional PID controller is presented so that a good closed-loop system performance is achieved. Simulated results from this formation are carried out to show the efficacy of the technique proposed.
Comparative Analysis of P-I, I-P, PID and Fuzzy Controllers for Speed Control...
This document compares the performance of P-I, I-P, PID, and fuzzy logic controllers for speed control of a DC motor. It first presents the mathematical modeling of a DC motor. It then describes the design and implementation of the four controllers using MATLAB/Simulink. The P-I, I-P, and PID controllers are tuned using the Ziegler-Nichols method. Simulation results show that the fuzzy logic controller eliminates overshoot completely and achieves the fastest settling time, performing better than the other controllers.
Performance Comparison of Conventional Controller with Fuzzy Logic Controller...
It is often difficult to develop an accurate mathematical model of DC motor due to unknown load variation, unknown and unavoidable parameter variations or nonlinearities due to saturation temperature variations and system disturbances. Fuzzy logic application can handle such nonlinearities so that the controller design is fundamentally robust which is not possible in conventional controllers. The knowledge base of a fuzzy logic controller (FLC) encapsulates expert knowledge and consists of the Data base (membership functions) and Rule-Base of the controller. Optimization of both these knowledge base components is critical to the performance of the controller and has traditionally been achieved through a process of trial and error. Such an approach is convenient for FLCs having low numbers of input variables however for greater numbers of inputs, more formal methods of knowledge base optimization are required. In this work, we study the challenging task of controlling the speed of DC motor. The feasibility of such controller design is evaluated by simulation in the MATLAB/Simulink environment. In this study Conventional Proportional Integral Derivative controller, Fuzzy logic controller using a chopper circuit and Fuzzy tuned PID controller are analyzed and compared. Simulation software like MATLAB with Simulink has been used for modeling and simulation purpose. The performance comparison of conventional controller with Fuzzy logic controller using chopper circuit and Fuzzy tuned PID controller has been done in terms of several performance measures Such as Settling time, Rise time and Overshoot.
Design of multiloop controller for
In this study the controller for three tank multi loop system is designed using coefficient Diagram
method. Coefficient Diagram Method is one of the polynomial methods in control design. The
controller designed by using CDM technique is based on the coefficients of the characteristics
polynomial of the closed loop system according to the convenient performance such as equivalent
time constant, stability indices and stability limit. Controller is designed for the three tank process
by using CDM Techniques; the simulation results show that the proposed control strategies have
good set point tracking and better response capability.
Disturbance Rejection with a Highly Oscillating Second-Order Process, Part I...
This research paper aims at investigating disturbance rejection associated with a highly oscillating
second-order process. The PD-PI controller having three parameters are tuned to provide efficient rejection of a
step input disturbance input. Controller tuning based on using MATLAB control and optimization toolboxes.
Using the suggested tuning technique, it is possible to reduce the maximum time response of the closed loop
control system to as low as 0.0095 and obtain time response to the disturbance input having zero settling time.
The effect of the proportional gain of the PD-PI controller on the control system dynamics is investigated for a
gain ≤ 100. The performance of the control system during disturbance rejection using the PD -PI controller is
compared with that using a second-order compensator. The PD-PI controller is superior in dealing with the
disturbance rejection associated with the highly oscillating second-order process
control system lab 02 - PID tuning
1) The document describes modeling a DC motor system using Simulink and modeling the mechanical and electrical portions. It also involves producing translational motion and observing outputs with different spring rates.
2) PID control of the DC motor system is explored through proportional, PI, PD, and full PID control. Effects of changing gains on response are examined. PID tuning in Simulink is demonstrated to automatically determine gains.
3) Tuning the PID controller for the DC motor model in Simulink is shown, with the controller sampled at 0.02 seconds. Gains are automatically determined through PID tuning to achieve reasonable performance and robustness based on the linearized plant model. Output response is observed and commenting on speed
Similar to PID Controller Transfer Function (20)
New controllers efficient model based design method
New controllers efficient model based design method
1.[1 5]implementation of pre compensation fuzzy for a cascade pid controller ...
1.[1 5]implementation of pre compensation fuzzy for a cascade pid controller ...
IRJET- Speed Control of Induction Motor using Hybrid PID Fuzzy Controller
IRJET- Speed Control of Induction Motor using Hybrid PID Fuzzy Controller
Design of Adaptive Sliding Mode Control with Fuzzy Controller and PID Tuning ...
Design of Adaptive Sliding Mode Control with Fuzzy Controller and PID Tuning ...
A simplified method of designing a phase lead compensator to improve the m-s-...
A simplified method of designing a phase lead compensator to improve the m-s-...
A simplified method of designing a phase lead compensator to improve the m-s-...
A simplified method of designing a phase lead compensator to improve the m-s-...
Control tutorials for matlab and simulink introduction pid controller desig...
Control tutorials for matlab and simulink introduction pid controller desig...
Speed control of dc motor using relay feedback tuned pi
Speed control of dc motor using relay feedback tuned pi
PID Controller Simulator Design for Polynomials Transfer Function
PID Controller Simulator Design for Polynomials Transfer Function
Improving Structural Limitations of Pid Controller For Unstable Processes
Improving Structural Limitations of Pid Controller For Unstable Processes
Comparative Analysis of P-I, I-P, PID and Fuzzy Controllers for Speed Control...
Comparative Analysis of P-I, I-P, PID and Fuzzy Controllers for Speed Control...
Performance Comparison of Conventional Controller with Fuzzy Logic Controller...
Performance Comparison of Conventional Controller with Fuzzy Logic Controller...
Disturbance Rejection with a Highly Oscillating Second-Order Process, Part I...
Disturbance Rejection with a Highly Oscillating Second-Order Process, Part I...
More from Mohammad Umar Rehman
PEE-102A_L-11
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
PEE-102A_L-12
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
PEE-102A_L-8
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
PEE-102A_L-10
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
PEE-102A_L-9
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
PEE-102A_L-7
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
PEE-102A_L-6
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
PEE-102A_L-5
- The document discusses alternating current (AC) and its generation using a simple AC generator. AC voltage and current change polarity and magnitude at regular time intervals.
- Key terms related to AC quantities are defined, including cycle, time period, frequency, peak value, average value, and root mean square (RMS) value. The frequency of power supply in India is 50 Hz.
- Behavior of AC circuits containing resistance, inductance, and capacitance is examined. Current and voltage are in phase for resistance. For inductance, current lags voltage by 90 degrees, while for capacitance current leads voltage by 90 degrees.
PEE-102A_L-4
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
PEE-102A_L-2
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
PEE-102A_L-3
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
PEE-102A_L-1
Lecture Slides for the course Fundamentals of Electrical Engineering delivered by me to First Semester Diploma in Mechanical Engineering.
BIE-601_Unit-4_Lec-4 & 5
Lecture Slides for the course Electronic Instrumentation-II delivered by me to Diploma in Electronics/Instrumentation Engineering.
BIE-601_Unit-5_Lec-3
Lecture Slides for the course Electronic Instrumentation-II delivered by me to Diploma in Electronics/Instrumentation Engineering.
BIE-601_Unit-5_Lec-2
Lecture Slides for the course Electronic Instrumentation-II delivered by me to Diploma in Electronics/Instrumentation Engineering.
BIE-601_Unit-5_Lec-1
Lecture Slides for the course Electronic Instrumentation-II delivered by me to Diploma in Electronics/Instrumentation Engineering.
BIE-601_Unit-4_Lec-3
Lecture Slides for the course Electronic Instrumentation-II delivered by me to Diploma in Electronics/Instrumentation Engineering.
BIE-601_Unit-4_Lec-2
Segmental displays are electronic display devices that display alphanumeric characters and numbers using seven LED or LCD segments arranged in a rectangular form. The seven segments are named a to g. 7-segment displays are commonly used in digital clocks and meters. Dot matrix displays use a matrix of LED indicators arranged in a rectangular grid that can be independently turned on and off to display text, numbers or graphics. A 5x7 matrix is most commonly used, with 35 LEDs arranged in 7 rows and 5 columns, allowing individual LEDs to be addressed to display characters.
BIE-601_Unit-4_Lec-1
Lecture Slides for the course Electronic Instrumentation-II delivered by me to Diploma in Electronics/Instrumentation Engineering.
BIE-601_Unit-3_Part-2
Lecture Slides for the course Electronic Instrumentation-II delivered by me to Diploma in Electronics/Instrumentation Engineering.
More from Mohammad Umar Rehman (20)
Recently uploaded
The Python for beginners. This is an advance computer language.
Python language is very important language at this time. we can easily understand this language by these notes.
Mechanical Engineering on AAI Summer Training Report-003.pdf
Mechanical Engineering PROJECT REPORT ON SUMMER VOCATIONAL TRAINING
AT MBB AIRPORT
IEEE Aerospace and Electronic Systems Society as a Graduate Student Member
IEEE Aerospace and Electronic Systems Society as a Graduate Student Member
22CYT12-Unit-V-E Waste and its Management.ppt
Introduction- e - waste – definition - sources of e-waste– hazardous substances in e-waste - effects of e-waste on environment and human health- need for e-waste management– e-waste handling rules - waste minimization techniques for managing e-waste – recycling of e-waste - disposal treatment methods of e- waste – mechanism of extraction of precious metal from leaching solution-global Scenario of E-waste – E-waste in India- case studies.
ISPM 15 Heat Treated Wood Stamps and why your shipping must have one
For International shipping and maritime laws all wood must contain the ISPM 15 Stamp. Here is how and why.
AI assisted telemedicine KIOSK for Rural India.pptx
It gives the overall description of SIH problem statement " AI assisted telemedicine KIOSK for Rural India".
Computational Engineering IITH Presentation
This Presentation will give you a brief idea about what Computational Engineering at IIT Hyderabad has to offer.
官方认证美国密歇根州立大学毕业证学位证书原版一模一样
原版一模一样【微信:741003700 】【美国密歇根州立大学毕业证学位证书】【微信:741003700 】学位证,留信认证(真实可查,永久存档)offer、雅思、外壳等材料/诚信可靠,可直接看成品样本,帮您解决无法毕业带来的各种难题!外壳,原版制作,诚信可靠,可直接看成品样本。行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备。十五年致力于帮助留学生解决难题,包您满意。
本公司拥有海外各大学样板无数,能完美还原海外各大学 Bachelor Diploma degree, Master Degree Diploma
1:1完美还原海外各大学毕业材料上的工艺:水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠。文字图案浮雕、激光镭射、紫外荧光、温感、复印防伪等防伪工艺。材料咨询办理、认证咨询办理请加学历顾问Q/微741003700
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
Comparative analysis between traditional aquaponics and reconstructed aquapon...
The aquaponic system of planting is a method that does not require soil usage. It is a method that only needs water, fish, lava rocks (a substitute for soil), and plants. Aquaponic systems are sustainable and environmentally friendly. Its use not only helps to plant in small spaces but also helps reduce artificial chemical use and minimizes excess water use, as aquaponics consumes 90% less water than soil-based gardening. The study applied a descriptive and experimental design to assess and compare conventional and reconstructed aquaponic methods for reproducing tomatoes. The researchers created an observation checklist to determine the significant factors of the study. The study aims to determine the significant difference between traditional aquaponics and reconstructed aquaponics systems propagating tomatoes in terms of height, weight, girth, and number of fruits. The reconstructed aquaponics system’s higher growth yield results in a much more nourished crop than the traditional aquaponics system. It is superior in its number of fruits, height, weight, and girth measurement. Moreover, the reconstructed aquaponics system is proven to eliminate all the hindrances present in the traditional aquaponics system, which are overcrowding of fish, algae growth, pest problems, contaminated water, and dead fish.
Use PyCharm for remote debugging of WSL on a Windo cf5c162d672e4e58b4dde5d797...
This document serves as a comprehensive step-by-step guide on how to effectively use PyCharm for remote debugging of the Windows Subsystem for Linux (WSL) on a local Windows machine. It meticulously outlines several critical steps in the process, starting with the crucial task of enabling permissions, followed by the installation and configuration of WSL.
The guide then proceeds to explain how to set up the SSH service within the WSL environment, an integral part of the process. Alongside this, it also provides detailed instructions on how to modify the inbound rules of the Windows firewall to facilitate the process, ensuring that there are no connectivity issues that could potentially hinder the debugging process.
The document further emphasizes on the importance of checking the connection between the Windows and WSL environments, providing instructions on how to ensure that the connection is optimal and ready for remote debugging.
It also offers an in-depth guide on how to configure the WSL interpreter and files within the PyCharm environment. This is essential for ensuring that the debugging process is set up correctly and that the program can be run effectively within the WSL terminal.
Additionally, the document provides guidance on how to set up breakpoints for debugging, a fundamental aspect of the debugging process which allows the developer to stop the execution of their code at certain points and inspect their program at those stages.
Finally, the document concludes by providing a link to a reference blog. This blog offers additional information and guidance on configuring the remote Python interpreter in PyCharm, providing the reader with a well-rounded understanding of the process.
Optimizing Gradle Builds - Gradle DPE Tour Berlin 2024
Sinan from the Delivery Hero mobile infrastructure engineering team shares a deep dive into performance acceleration with Gradle build cache optimizations. Sinan shares their journey into solving complex build-cache problems that affect Gradle builds. By understanding the challenges and solutions found in our journey, we aim to demonstrate the possibilities for faster builds. The case study reveals how overlapping outputs and cache misconfigurations led to significant increases in build times, especially as the project scaled up with numerous modules using Paparazzi tests. The journey from diagnosing to defeating cache issues offers invaluable lessons on maintaining cache integrity without sacrificing functionality.
Redefining brain tumor segmentation: a cutting-edge convolutional neural netw...
Medical image analysis has witnessed significant advancements with deep learning techniques. In the domain of brain tumor segmentation, the ability to
precisely delineate tumor boundaries from magnetic resonance imaging (MRI)
scans holds profound implications for diagnosis. This study presents an ensemble convolutional neural network (CNN) with transfer learning, integrating
the state-of-the-art Deeplabv3+ architecture with the ResNet18 backbone. The
model is rigorously trained and evaluated, exhibiting remarkable performance
metrics, including an impressive global accuracy of 99.286%, a high-class accuracy of 82.191%, a mean intersection over union (IoU) of 79.900%, a weighted
IoU of 98.620%, and a Boundary F1 (BF) score of 83.303%. Notably, a detailed comparative analysis with existing methods showcases the superiority of
our proposed model. These findings underscore the model’s competence in precise brain tumor localization, underscoring its potential to revolutionize medical
image analysis and enhance healthcare outcomes. This research paves the way
for future exploration and optimization of advanced CNN models in medical
imaging, emphasizing addressing false positives and resource efficiency.
Recently uploaded (20)
The Python for beginners. This is an advance computer language.
The Python for beginners. This is an advance computer language.
4. Mosca vol I -Fisica-Tipler-5ta-Edicion-Vol-1.pdf
4. Mosca vol I -Fisica-Tipler-5ta-Edicion-Vol-1.pdf
Mechanical Engineering on AAI Summer Training Report-003.pdf
Mechanical Engineering on AAI Summer Training Report-003.pdf
IEEE Aerospace and Electronic Systems Society as a Graduate Student Member
IEEE Aerospace and Electronic Systems Society as a Graduate Student Member
john krisinger-the science and history of the alcoholic beverage.pptx
john krisinger-the science and history of the alcoholic beverage.pptx
Engineering Drawings Lecture Detail Drawings 2014.pdf
Engineering Drawings Lecture Detail Drawings 2014.pdf
ISPM 15 Heat Treated Wood Stamps and why your shipping must have one
ISPM 15 Heat Treated Wood Stamps and why your shipping must have one
AI assisted telemedicine KIOSK for Rural India.pptx
AI assisted telemedicine KIOSK for Rural India.pptx
Generative AI leverages algorithms to create various forms of content
Generative AI leverages algorithms to create various forms of content
Comparative analysis between traditional aquaponics and reconstructed aquapon...
Comparative analysis between traditional aquaponics and reconstructed aquapon...
Use PyCharm for remote debugging of WSL on a Windo cf5c162d672e4e58b4dde5d797...
Use PyCharm for remote debugging of WSL on a Windo cf5c162d672e4e58b4dde5d797...
Optimizing Gradle Builds - Gradle DPE Tour Berlin 2024
Optimizing Gradle Builds - Gradle DPE Tour Berlin 2024
Redefining brain tumor segmentation: a cutting-edge convolutional neural netw...
Redefining brain tumor segmentation: a cutting-edge convolutional neural netw...
PID Controller Transfer Function
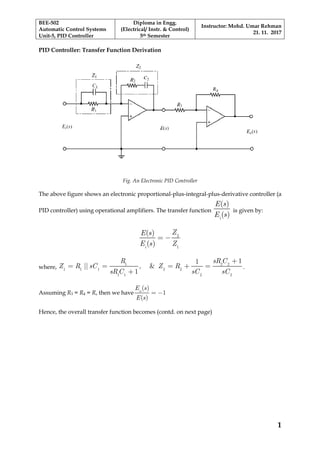
- 1. BEE-502 Automatic Control Systems Unit-5, PID Controller Diploma in Engg. (Electrical/ Instr. & Control) 5th Semester Instructor: Mohd. Umar Rehman 21. 11. 2017 1 PID Controller: Transfer Function Derivation Fig. An Electronic PID Controller The above figure shows an electronic proportional-plus-integral-plus-derivative controller (a PID controller) using operational amplifiers. The transfer function i ) ( ( )E s E s is given by: i ( ) ) (s ZE s E Z = − 2 1 where, , &|| sR C Z Z R sR sC sC R R sC C = + + = = =+1 2 2 1 1 1 2 2 1 1 2 2 1 1 1 . Assuming R3 = R4 = R, then we have o ( ( ) ) s E s E = −1 Hence, the overall transfer function becomes (contd. on next page)
- 2. BEE-502 Automatic Control Systems Unit-5, PID Controller Diploma in Engg. (Electrical/ Instr. & Control) 5th Semester Instructor: Mohd. Umar Rehman 21. 11. 2017 2 ( ) o i ( ) [ ing & i ( ) ( )( ) ( ng by ) ] s sRC sRC sC R R sRC sRC R sR s R C s RC RCR R sR R RC R E s Z E Z R C R C C C C C sR R R sRC + + + + = × + + + = = ÷ + = + + = 2 1 2 2 1 1 2 1 2 2 2 1 1 2 1 2 2 2 1 2 1 2 1 1 2 22 1 2 2 2 1 1 2 2 1 1 1 2 2 2 2 1 1 1 1 1 1 where, KR sR RC RC R C K CsKRC K R = + + + =2 1 1 1 1 2 2 1 2 2 2 2 1 1 Now, compare this expression with the following expression of TF: PID P D I ( ) K sG s K K s = + + 1 1 Then, we get the values of the various gains as follows: P I D , , KR K R K RC K KR K C = = =2 1 1 1 2 2 1 ►►►▬◄◄◄