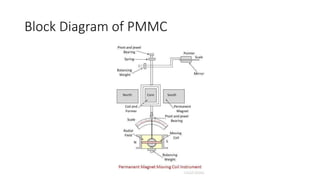
The document discusses several types of permanent magnet (PM) motors, including brushed DC motors, brushless DC motors, AC synchronous motors, PM stepper motors, switched reluctance motors, and linear PM motors. It notes the advantages and applications of each type. The document then focuses on brushless DC (BLDC) motors and permanent magnet synchronous motors (PMSM), comparing their drive configurations, which involve using an inverter and electronic commutation to control motor speed and torque based on position sensor feedback. It also discusses speed and torque control methods for BLDC and PMSM motors.