Download as PDF, PPTX

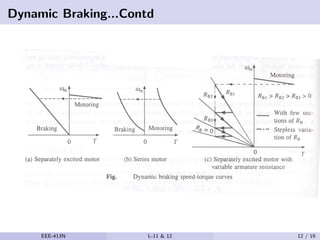
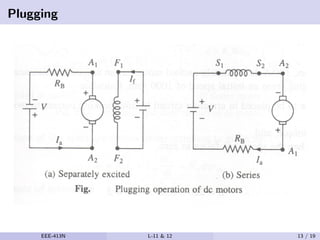
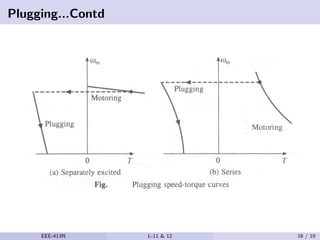
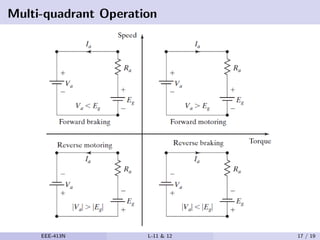

The document discusses braking methods for DC motors, emphasizing electric braking techniques over mechanical ones due to their efficiency. It outlines three primary electric braking methods: regenerative braking, dynamic braking, and plugging, detailing their mechanisms and requirements. The content also highlights the implications of multi-quadrant operation for DC motor drives.