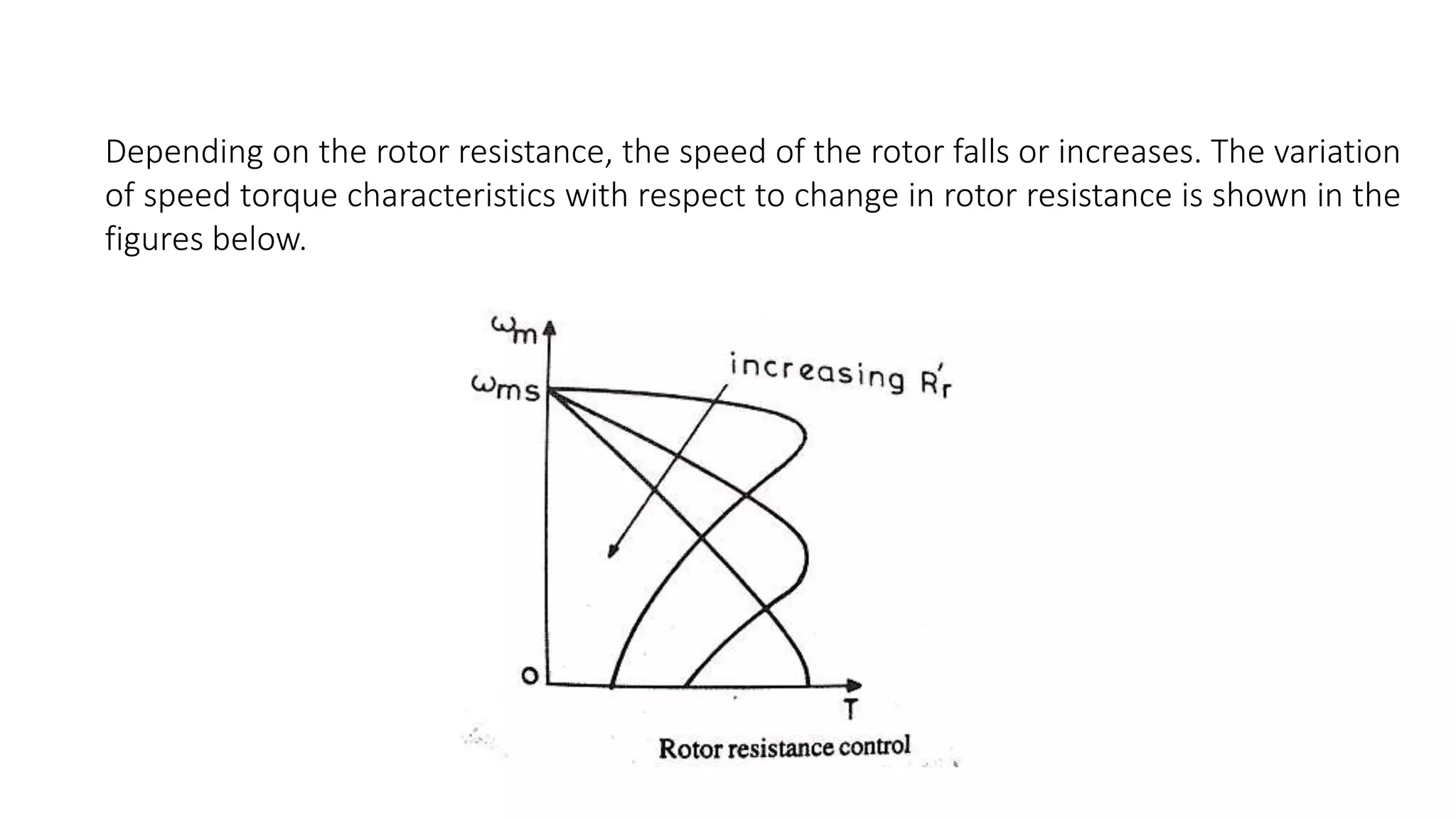
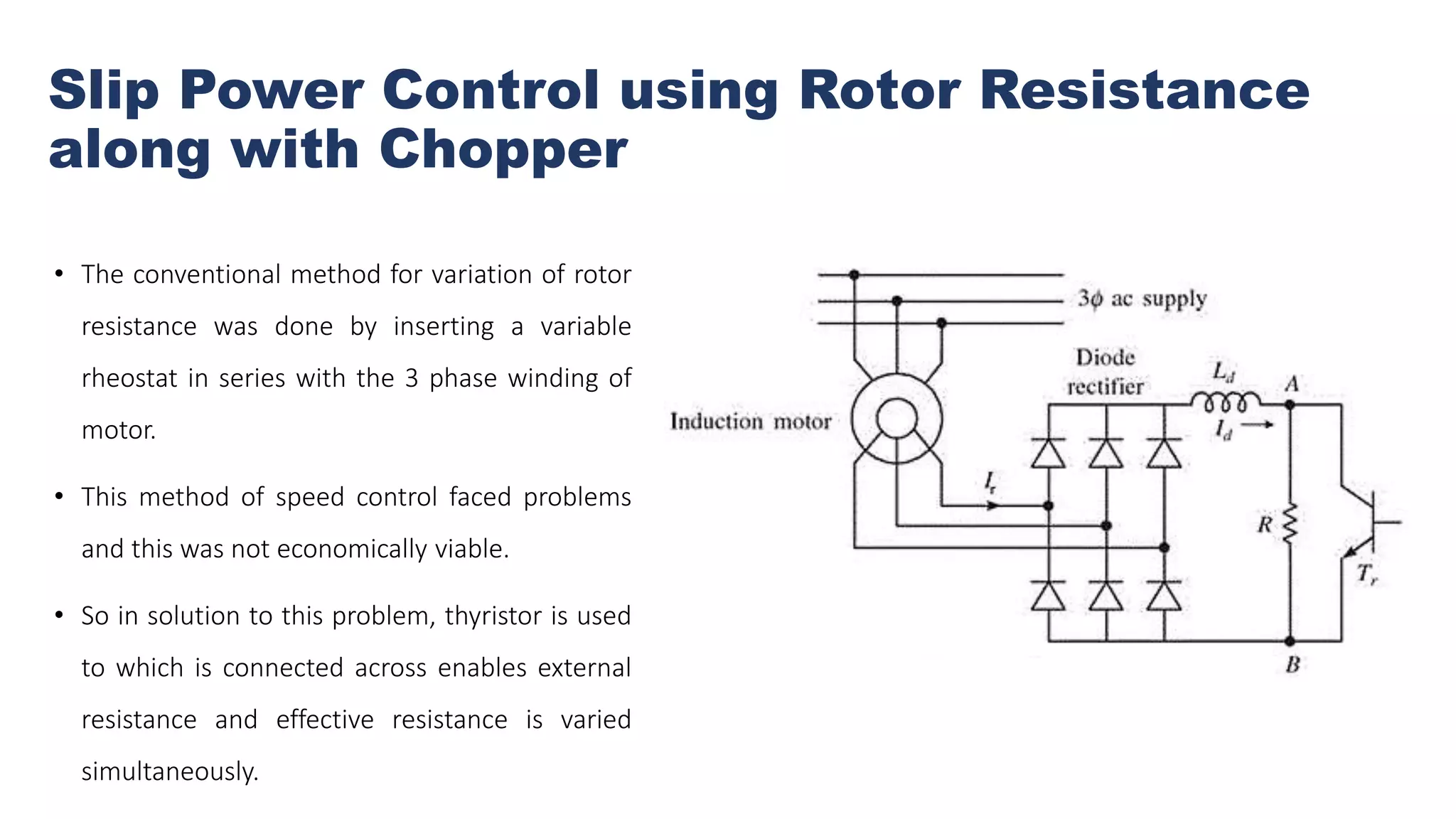
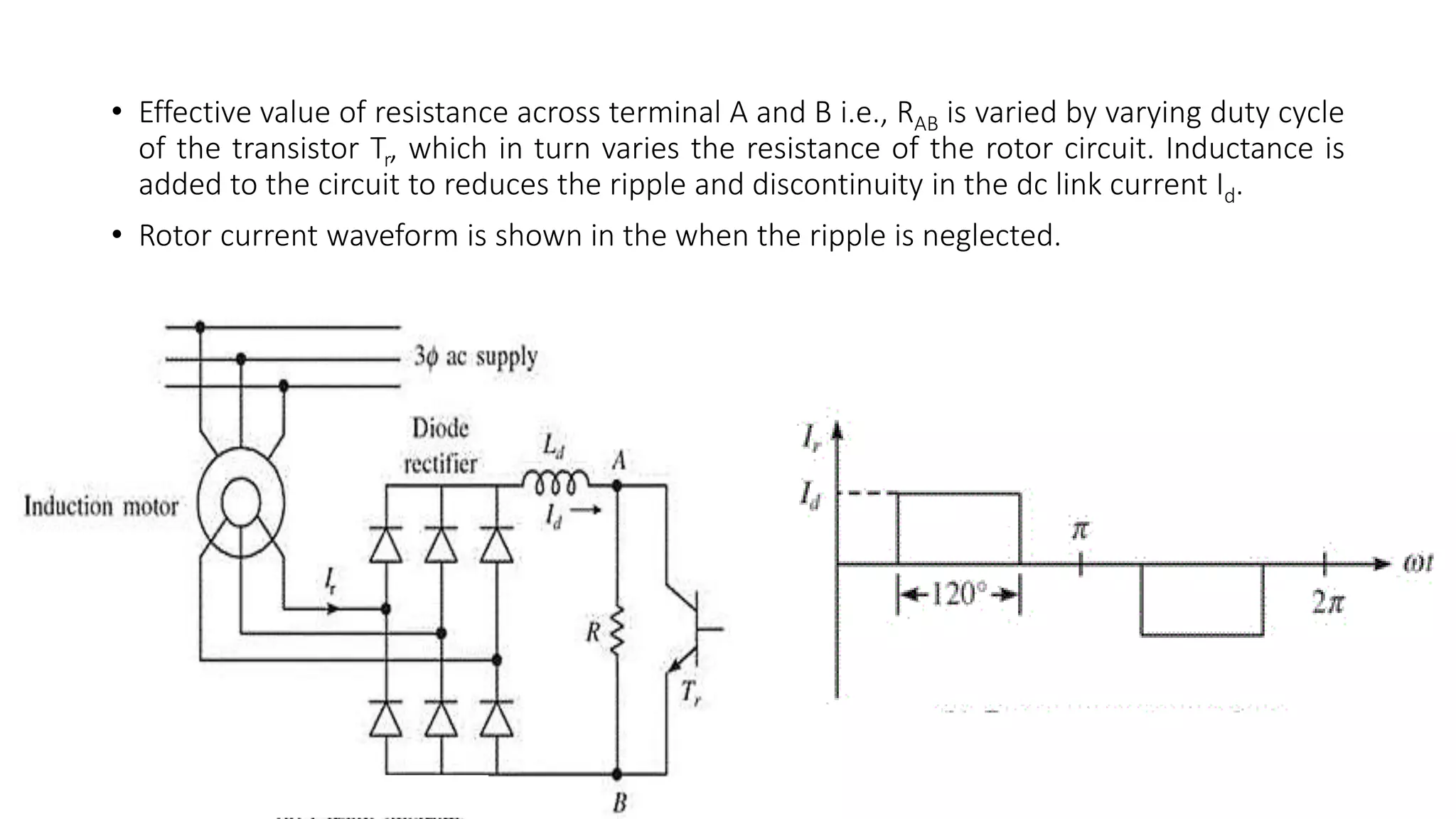
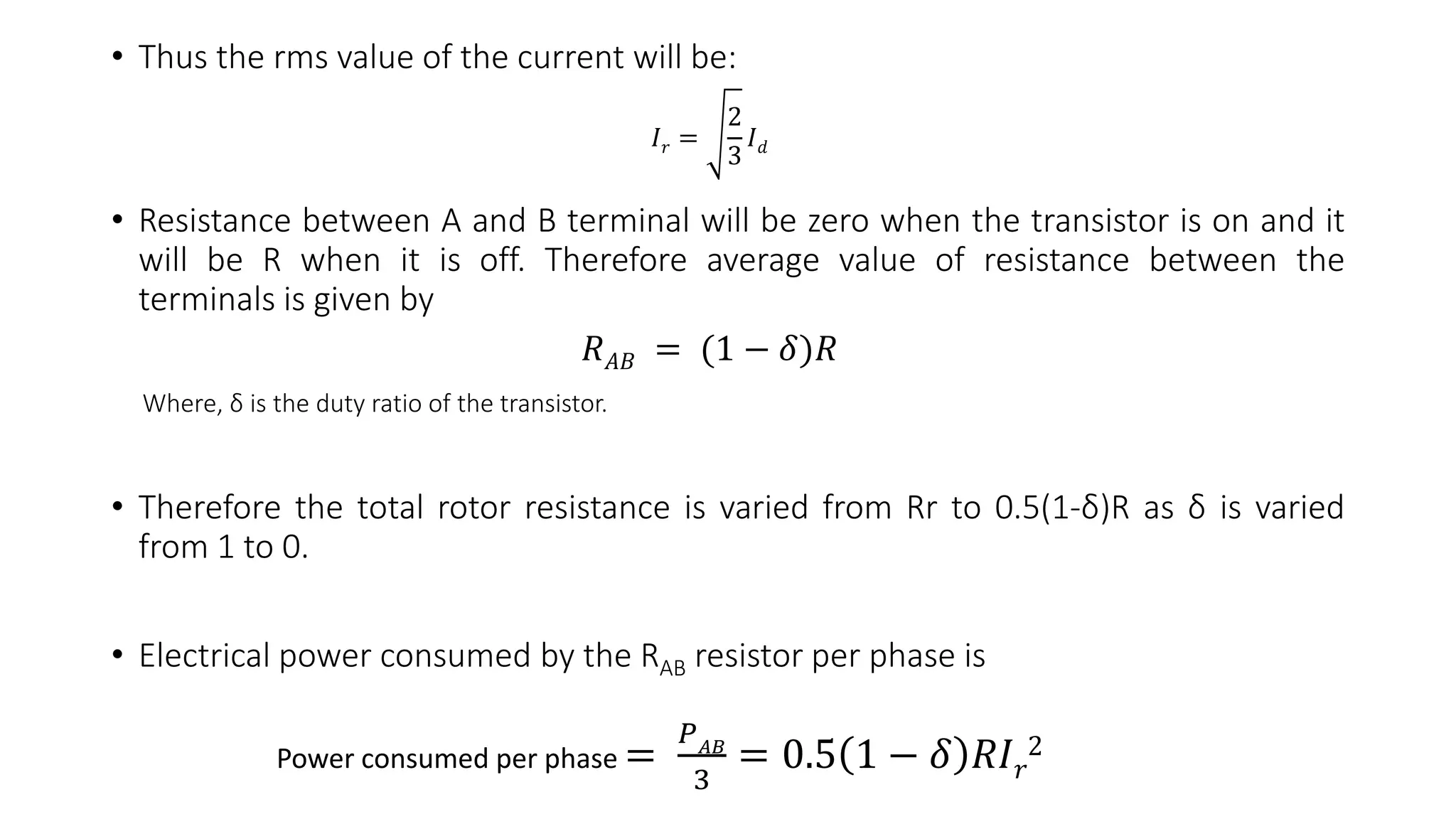
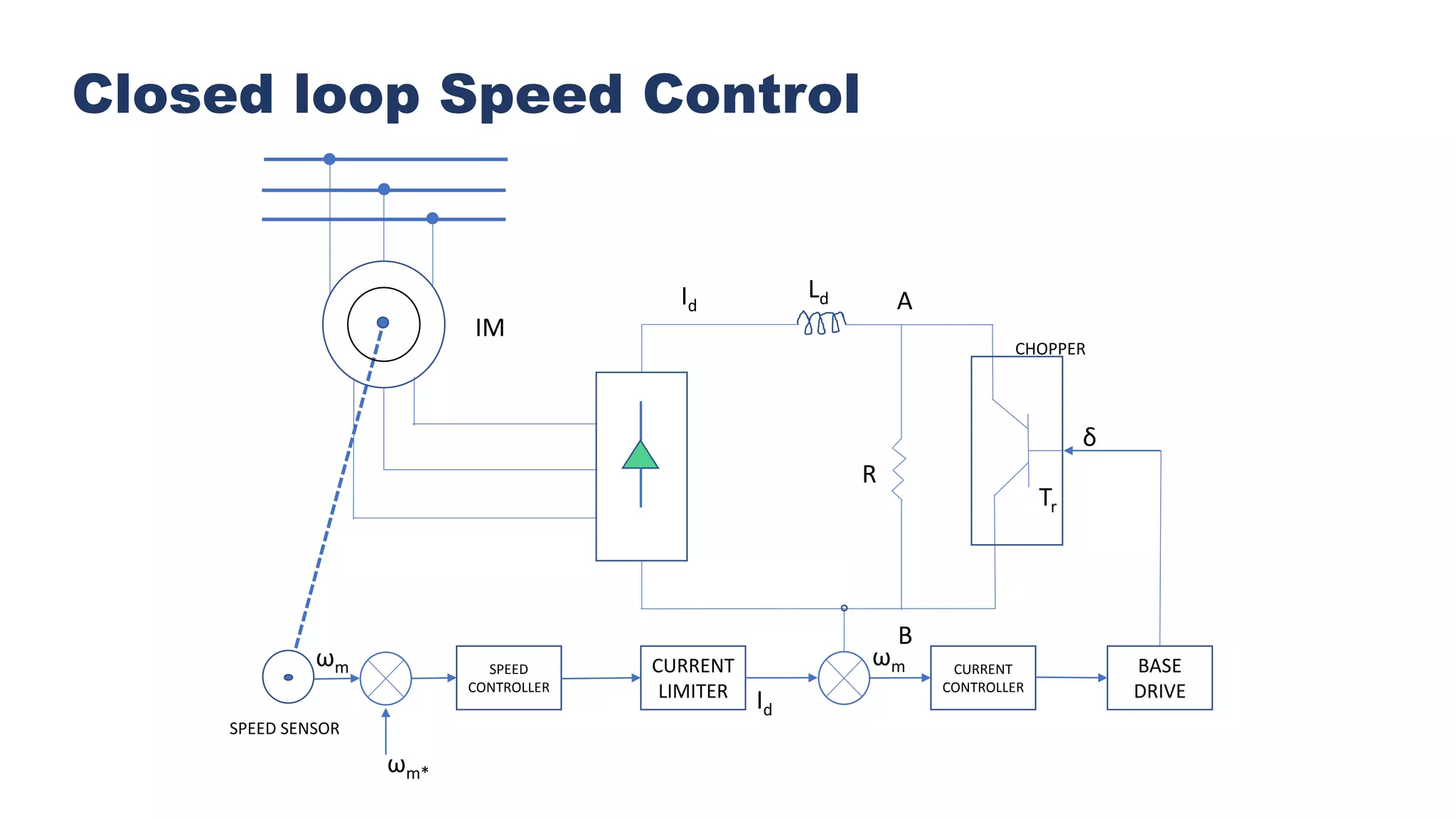
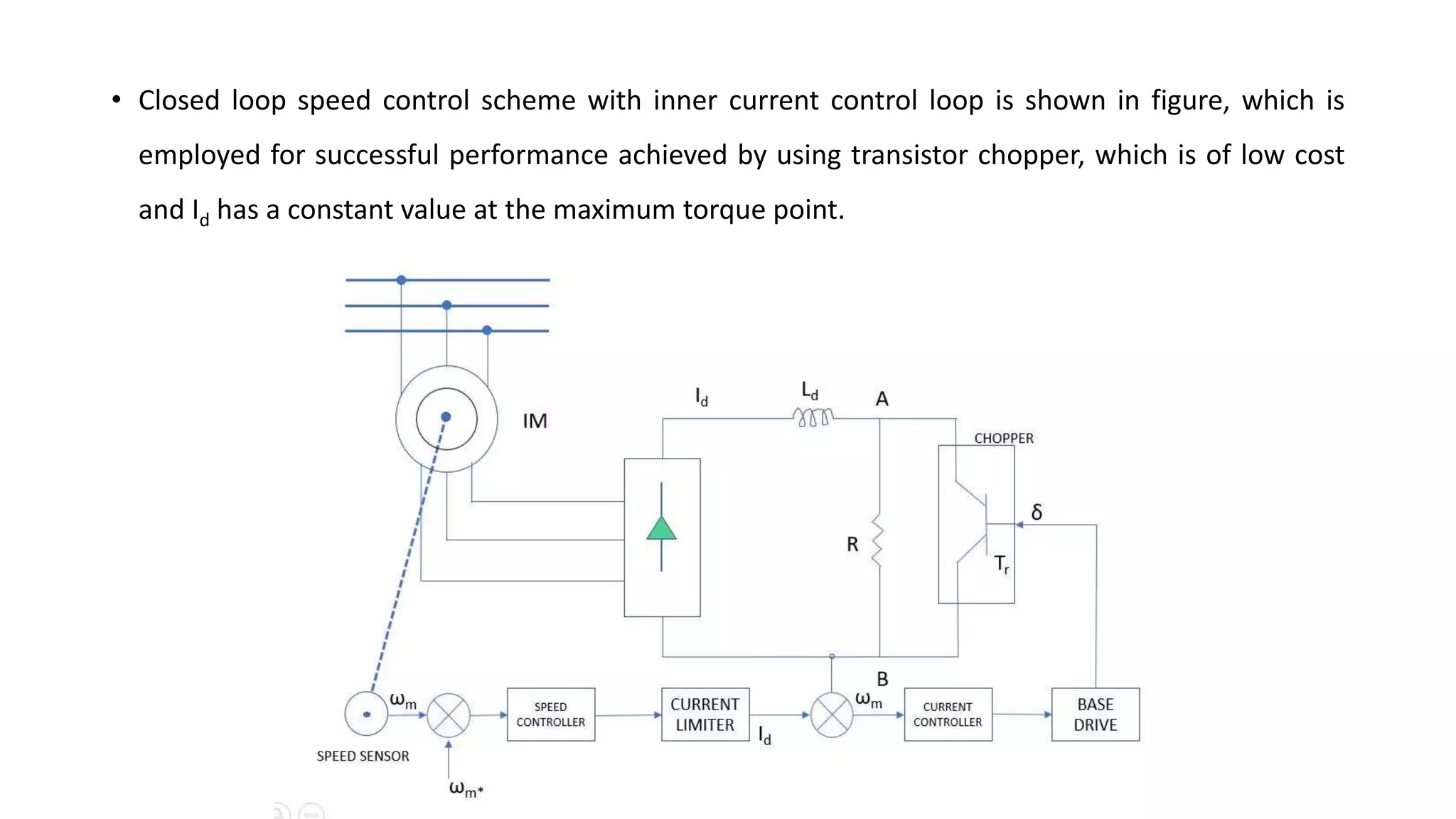
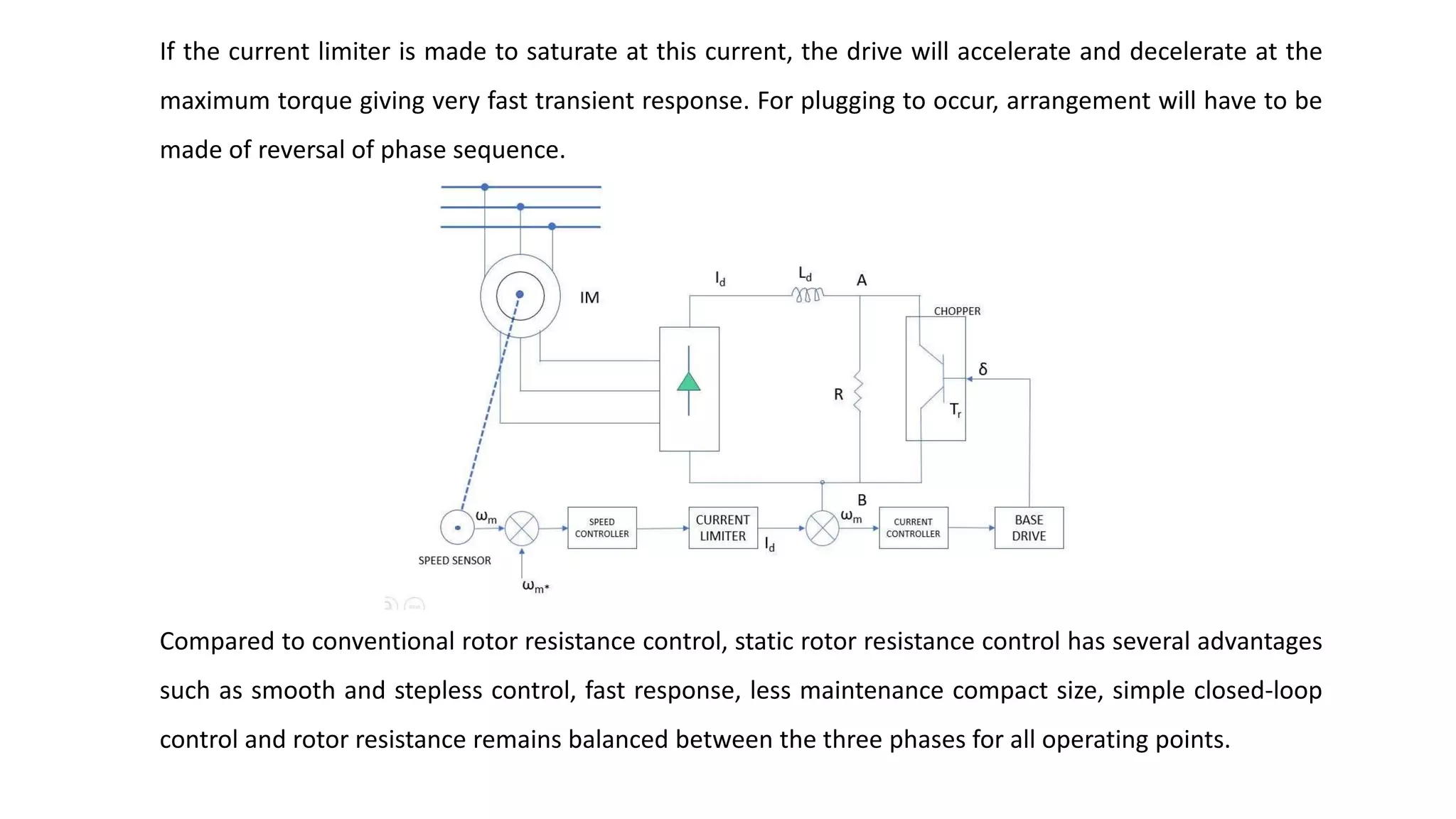
The document discusses rotor resistance control for induction motors, highlighting its method of speed control through external resistance connected via slip rings, applicable only to wound rotor motors. It explains the limitations of traditional variable rheostat methods and introduces a thyristor-based solution for varying rotor resistance in a more economical and effective manner. Additionally, it mentions the benefits of static rotor resistance control, including smooth operation and reduced maintenance.