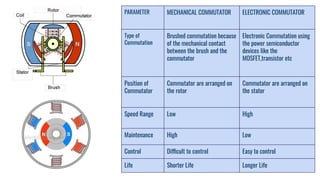
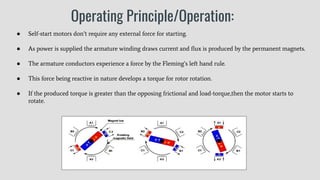
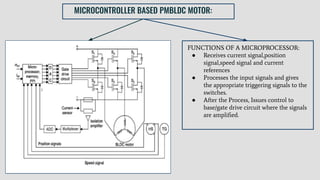
Permanent magnet synchronous motors (PMSMs) are electronically commutated using a closed-loop controller and switching power supply. The controller provides current pulses to the motor windings that control the speed and torque. PMSMs use electronic commutation of the stator windings rather than a mechanical commutator, allowing for easier control and a wider speed range compared to motors with mechanical commutators. The operating principle involves current in the armature windings interacting with the permanent magnets' magnetic field to generate torque for rotation based on Fleming's left hand rule.