Downloaded 145 times

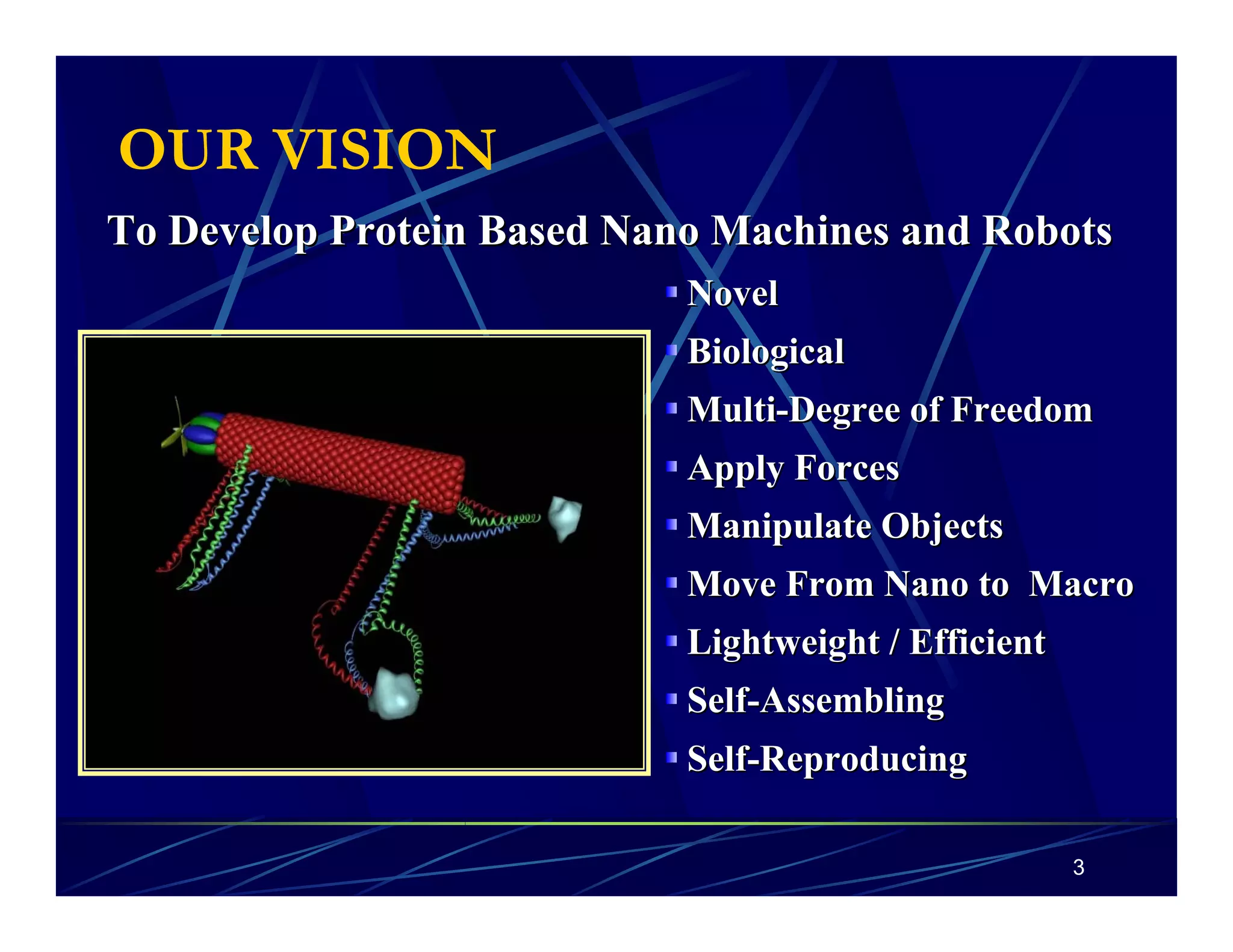
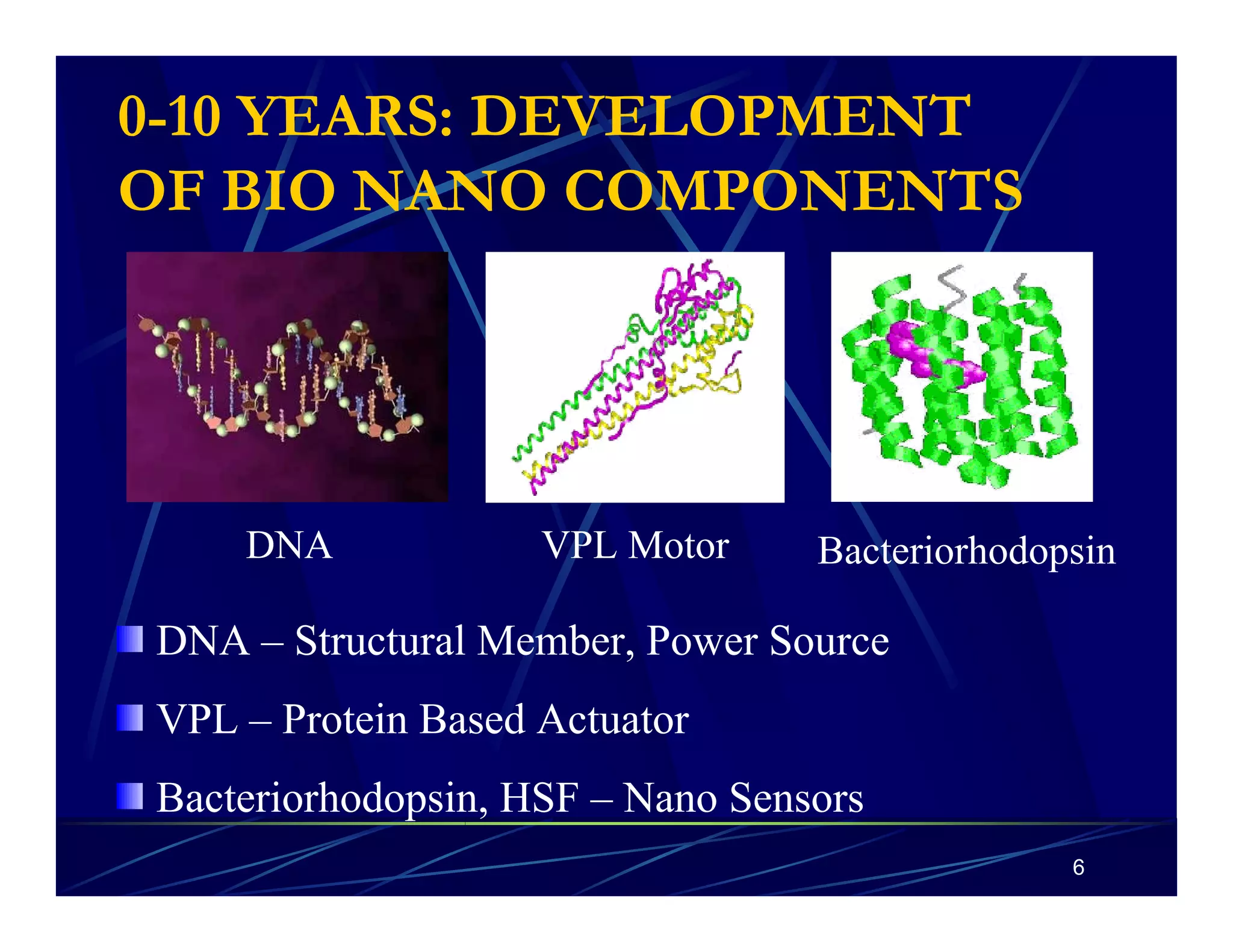
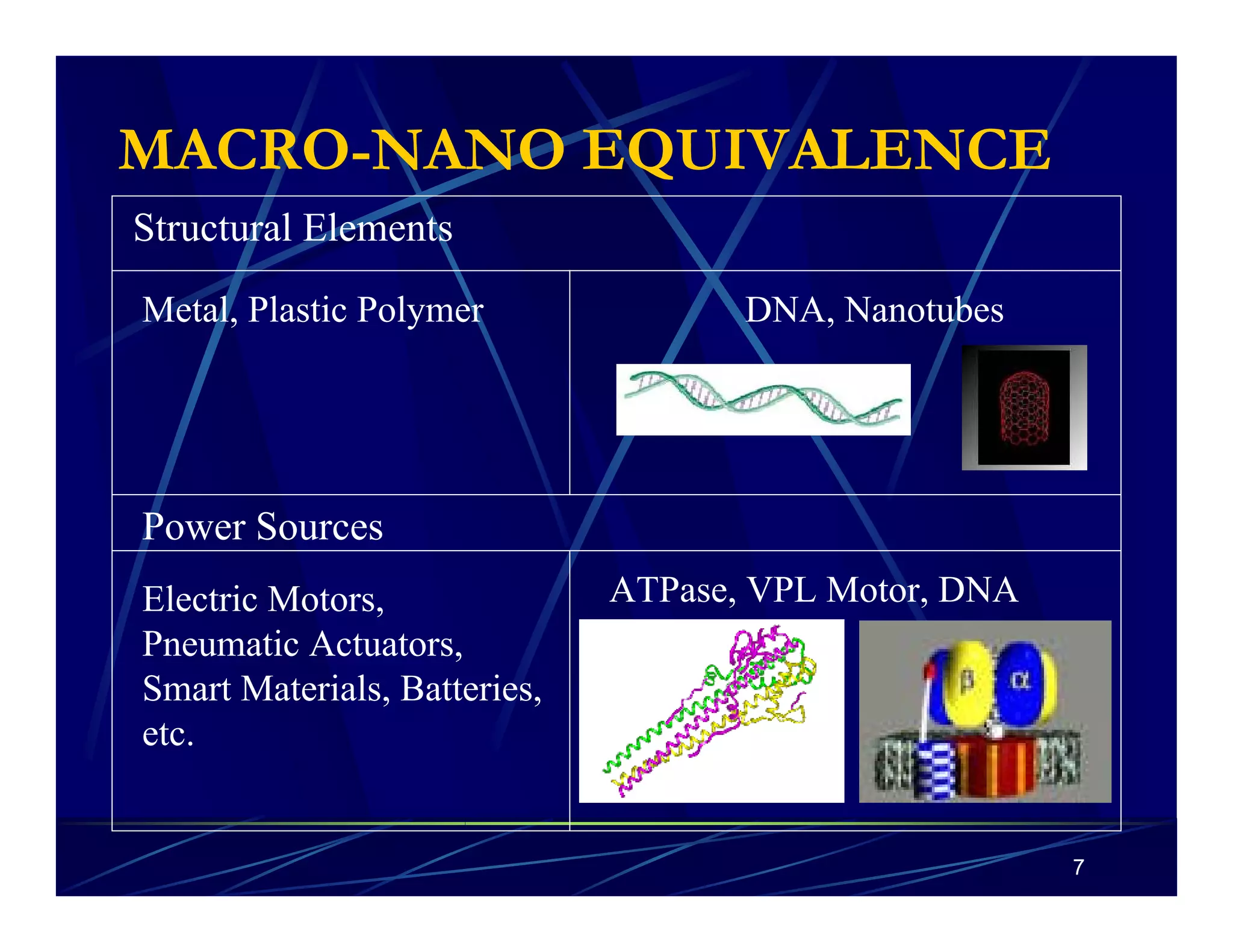
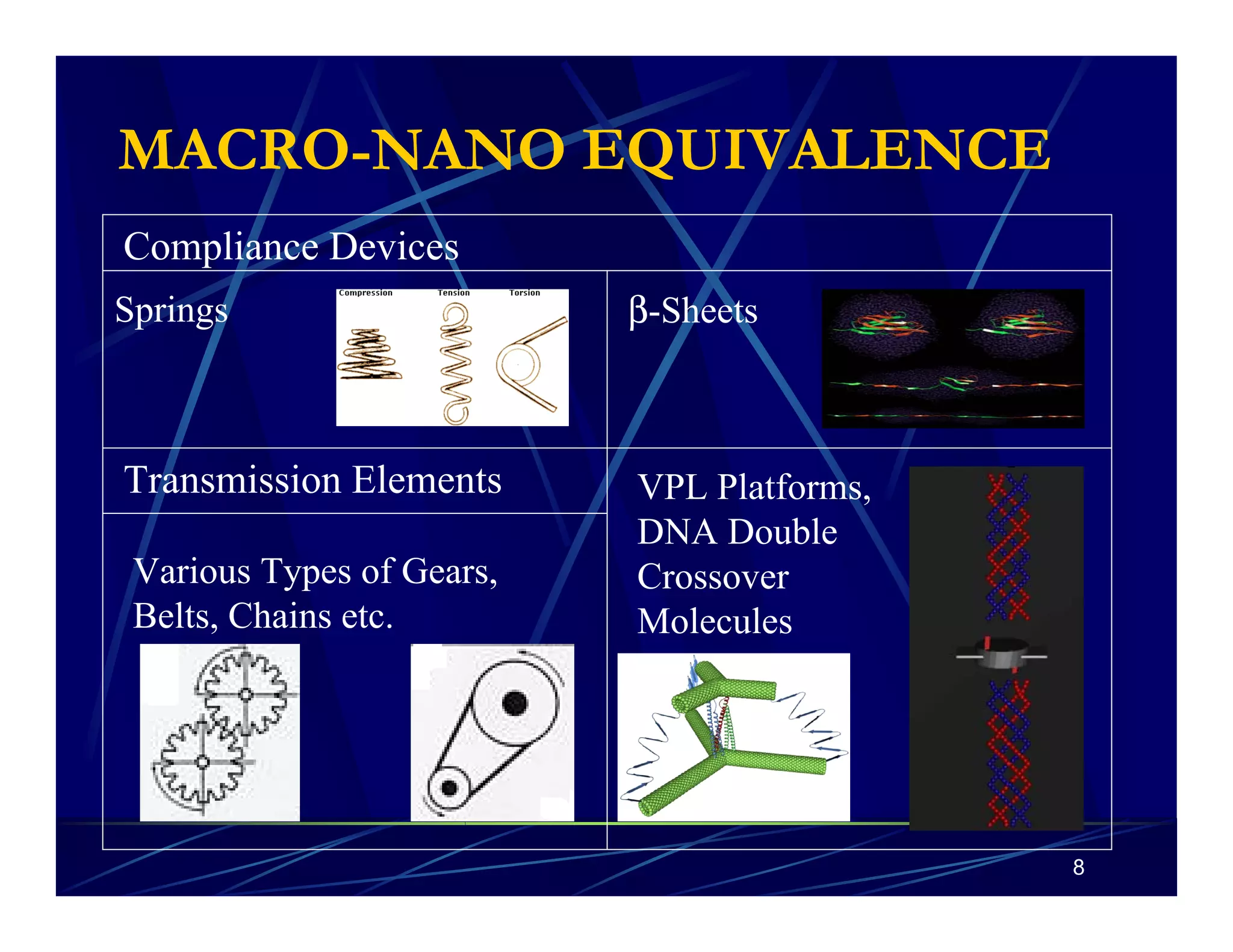
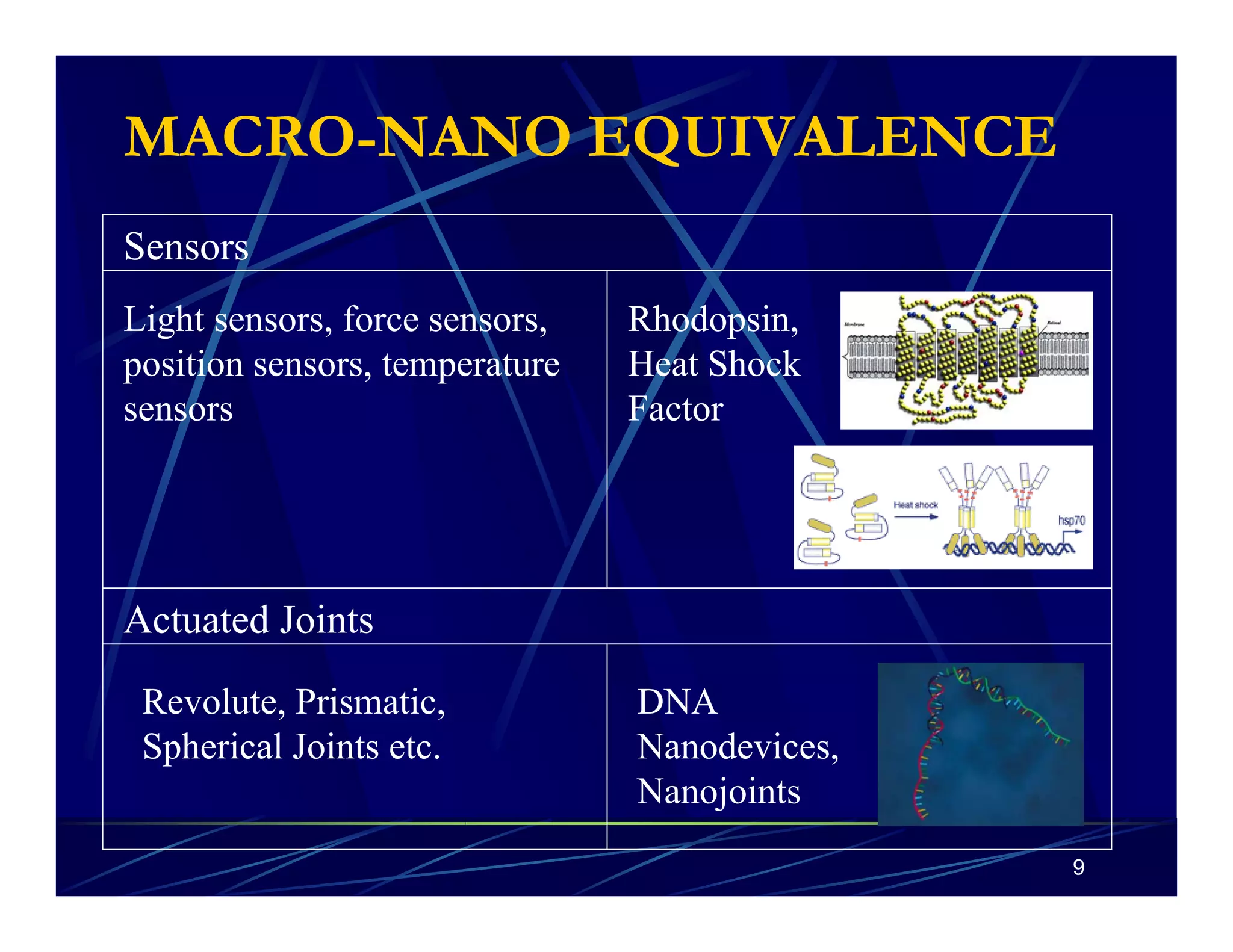
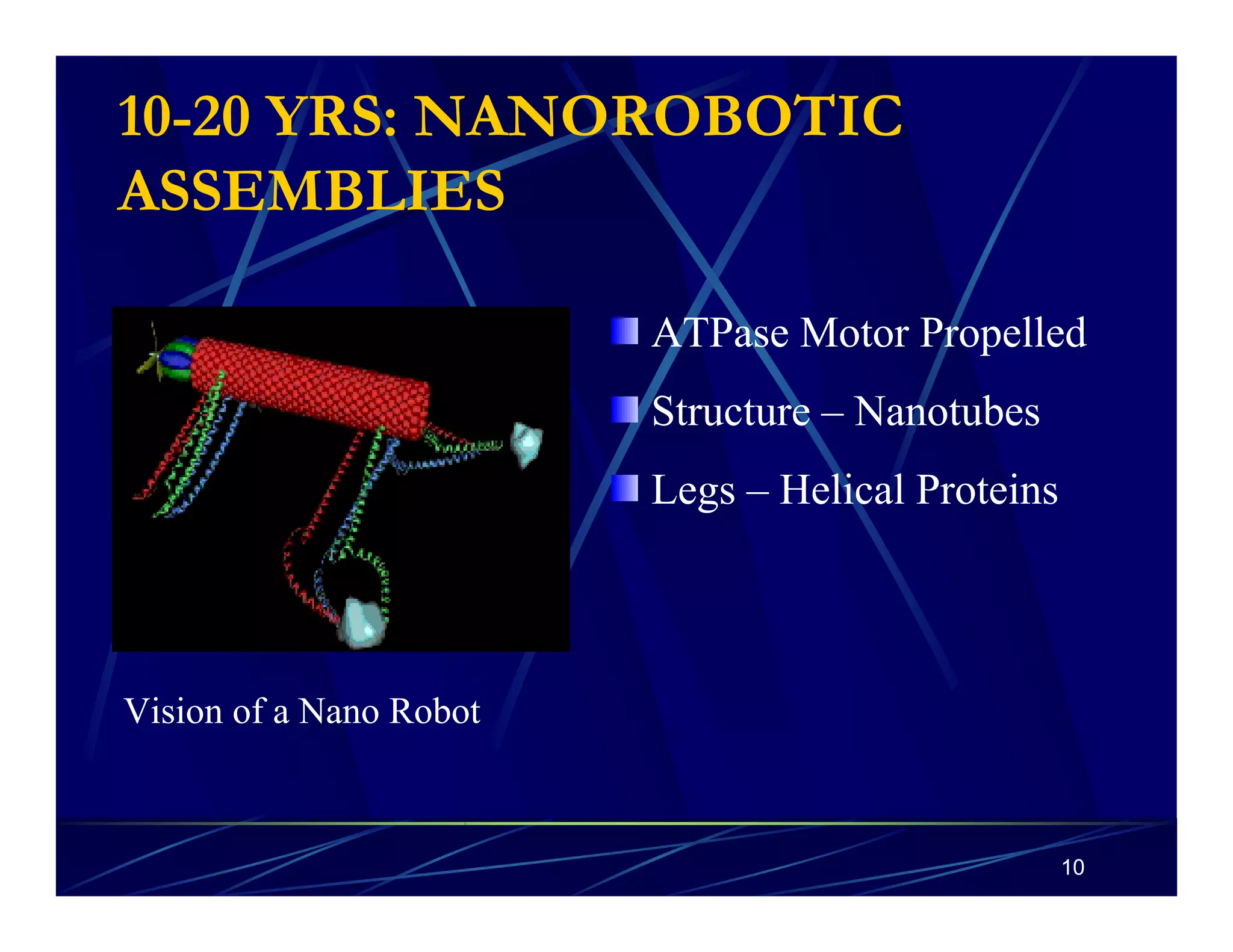
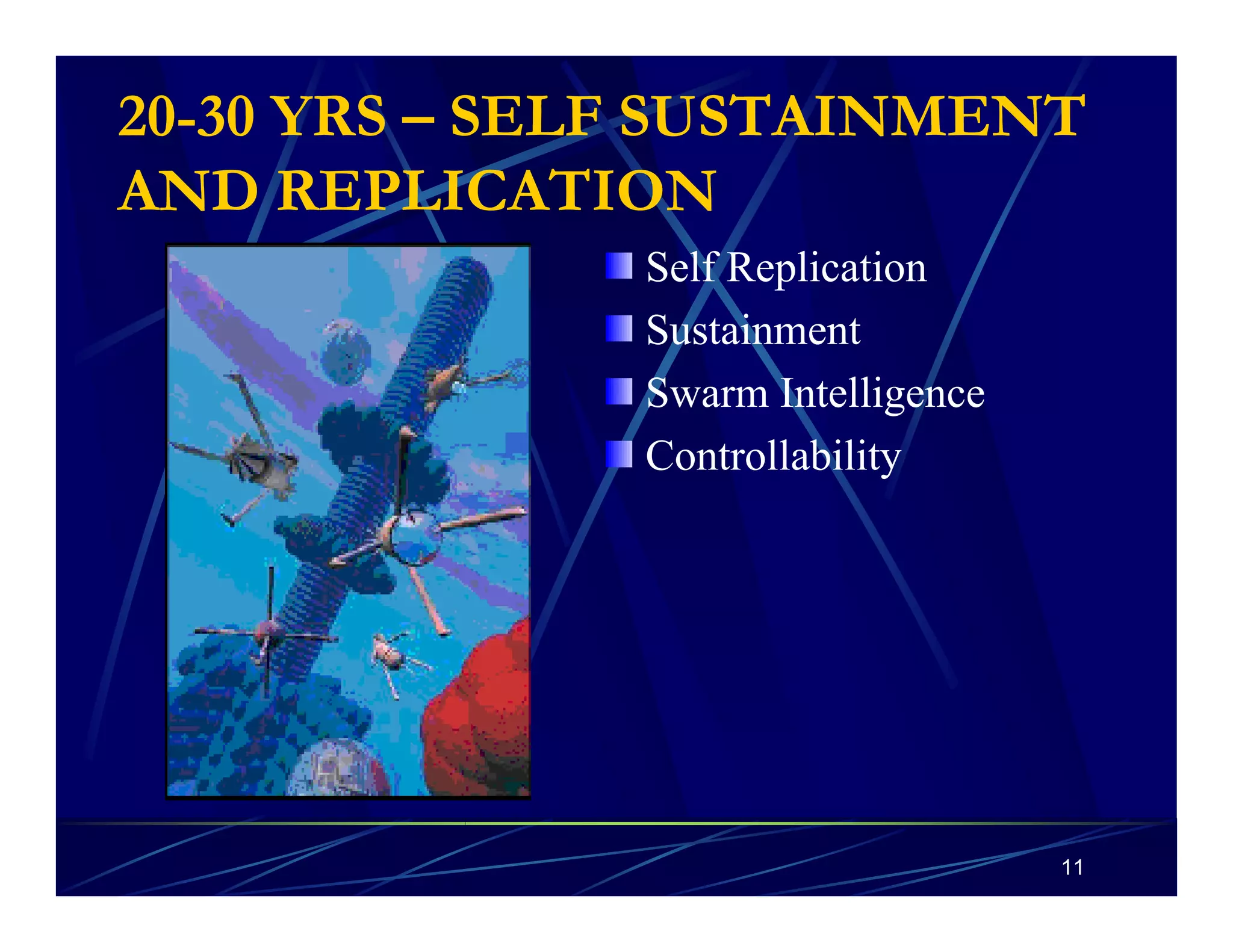

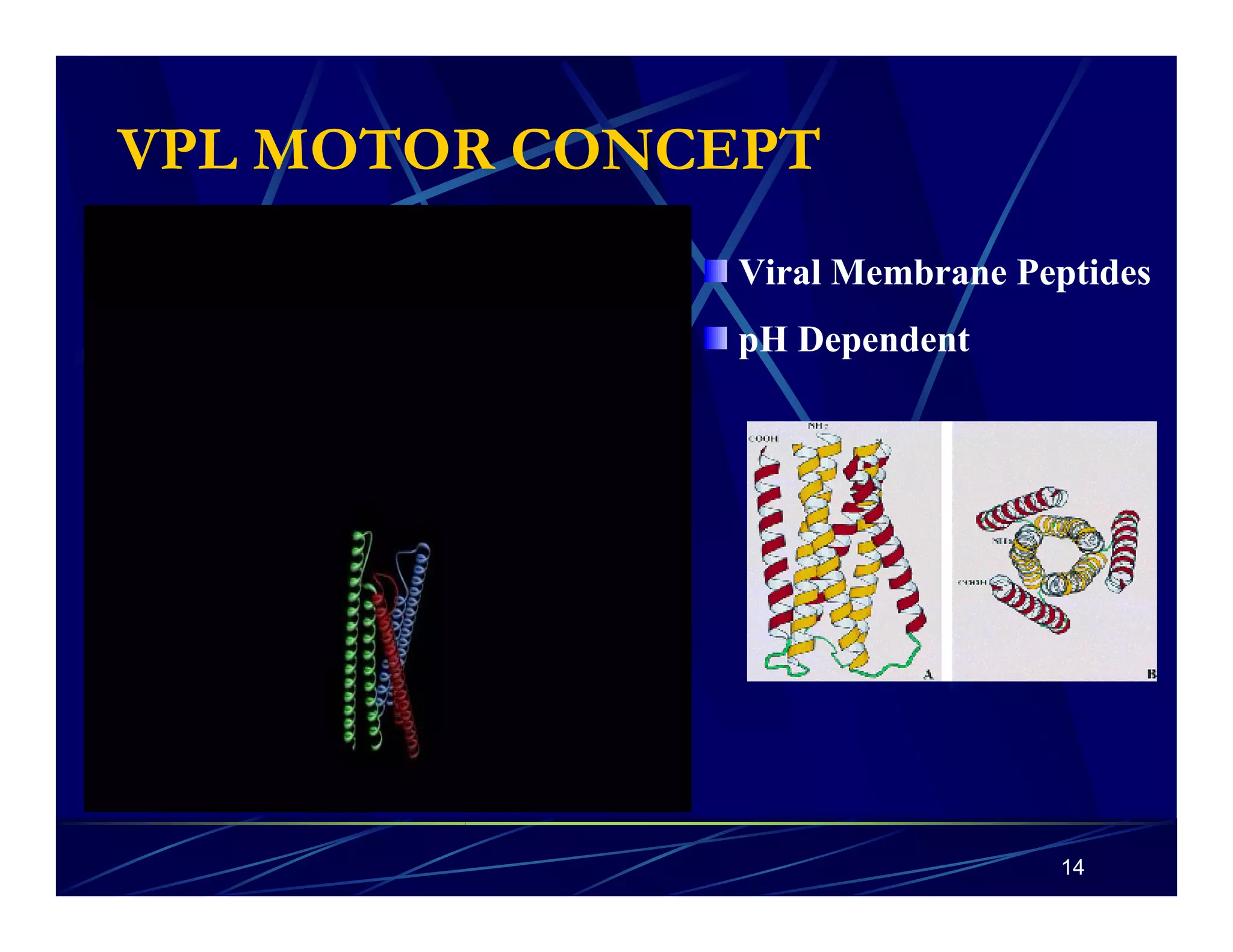
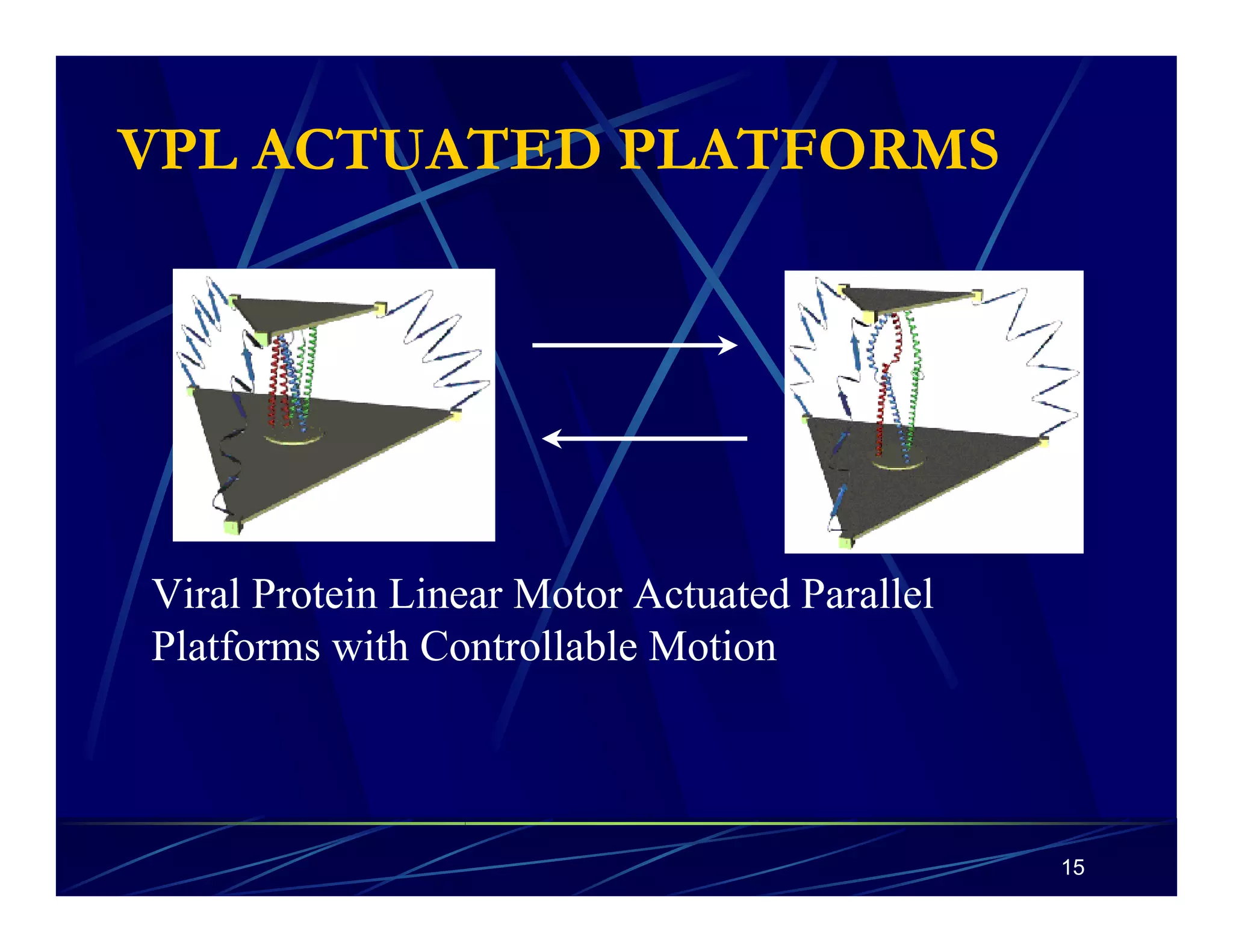



This document proposes developing protein-based nanomachines and robots for space applications over the next 50 years. In Phase I, the team will identify proteins for nanoscale mechanisms, develop computational models, and perform experiments to assemble and test components like viral protein linear motors and DNA joints. The long term vision is to develop self-sustaining nanorobotic assemblies capable of space colonization tasks like remote sensing and signal transmission.



































































![Wassersug richard[1]](https://cdn.slidesharecdn.com/ss_thumbnails/wassersugrichard1-140914105156-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)








