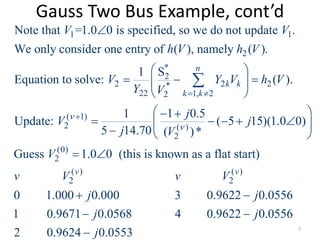
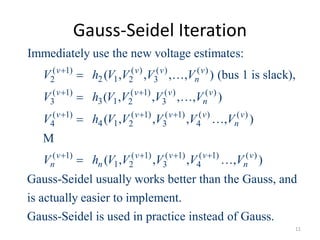
This document provides an overview of load flow analysis and power flow solution techniques, specifically the Gauss-Seidel and Newton-Raphson methods. It begins with an example Gauss-Seidel power flow calculation for a two bus system. It then discusses the inclusion of PV generator buses in the Gauss-Seidel iteration and accelerated Gauss-Seidel convergence. The document concludes by introducing the Newton-Raphson power flow algorithm and comparing the advantages and disadvantages of Gauss-Seidel versus Newton-Raphson.
![Two Bus PV Example, cont'd
( ) ( )* ( )
22 2
1
( ) ( )* ( ) ( )*
21 221 2 2 2
( )* ( )*
( 1) ( ) ( )2 2
2 212 1( )* ( )*
22 221, 22 2
(0)
2
( ) ( 1) ( 1)
2 2 2
Im ,
Im[ ]
1 1
Guess 1.05 0
0 0 0.457
k
n
v v
k
k
n
k k
k k
v v v
Q V Y V
Y V V Y V V
S S
V Y V Y V
Y YV V
V
v S V V
j
%
%
1.045 0.83 1.050 0.83
1 0 0.535 1.049 0.93 1.050 0.93
2 0 0.545 1.050 0.96 1.050 0.96
j
j
16](https://image.slidesharecdn.com/lfa-200309103344/85/Load-flow-study-Part-I-16-320.jpg)

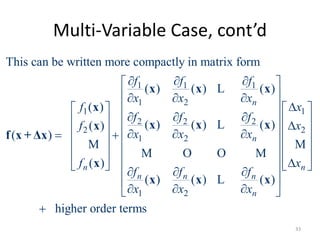
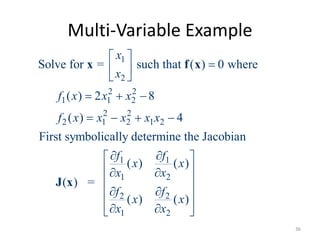
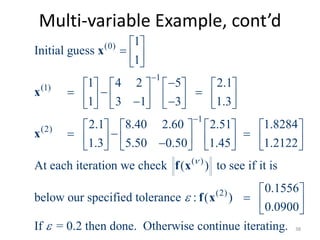
![Multi-variable Example, cont’d
1 2
1 2 1 2
1
1 1 2 1
2 1 2 1 2 2
4 2
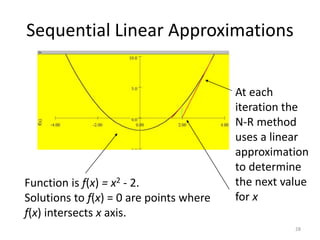
( ) =
2 2
4 2 ( )
Then
2 2 ( )
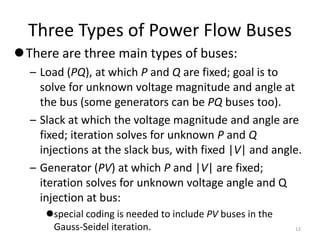
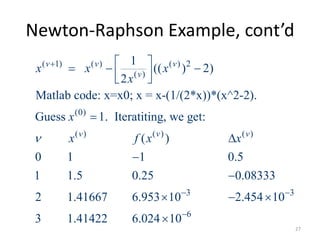
Matlab code: x1=x10; x2=x20;
f1=2*x1^2+x2^2-8;
f2=x1^2-x2^2+x1*x2-4;
J = [4*x1 2*x2; 2*x1+x2 x1-2*x2];
[x1;x2] =
x x
x x x x
x x x f
x x x x x f
J x
x
x
[x1;x2]-inv(J)*[f1;f2].
37](https://image.slidesharecdn.com/lfa-200309103344/85/Load-flow-study-Part-I-37-320.jpg)