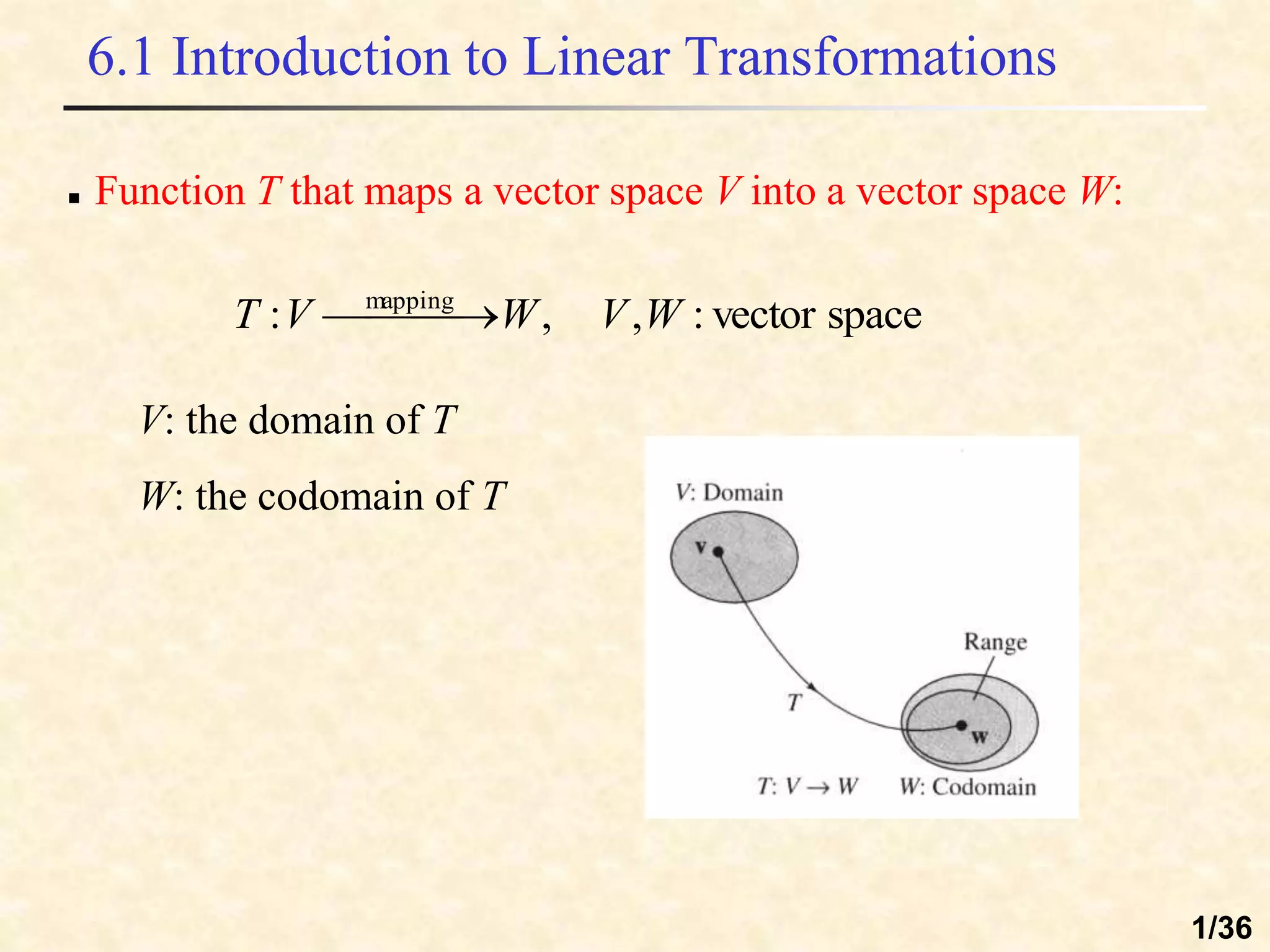
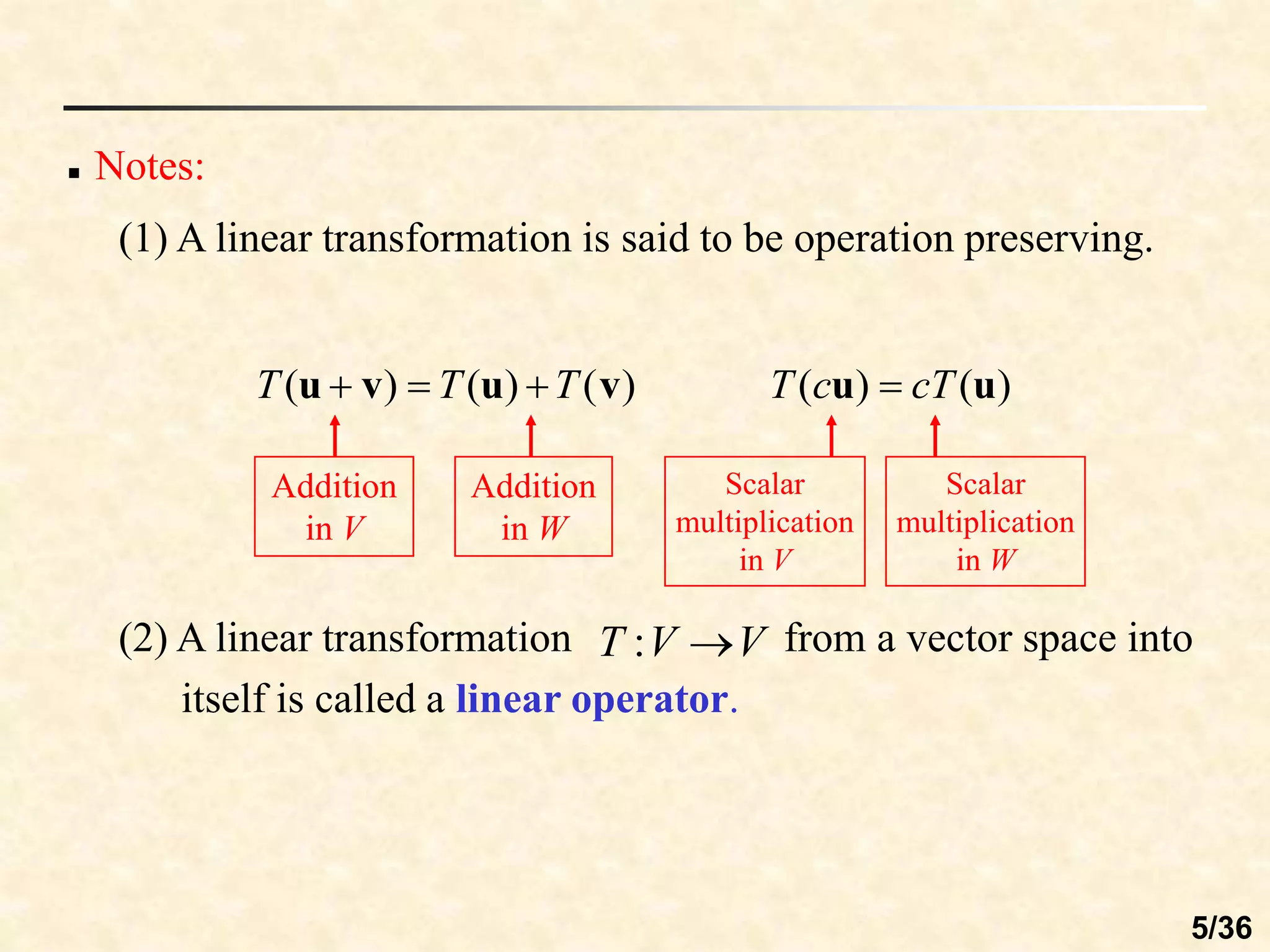
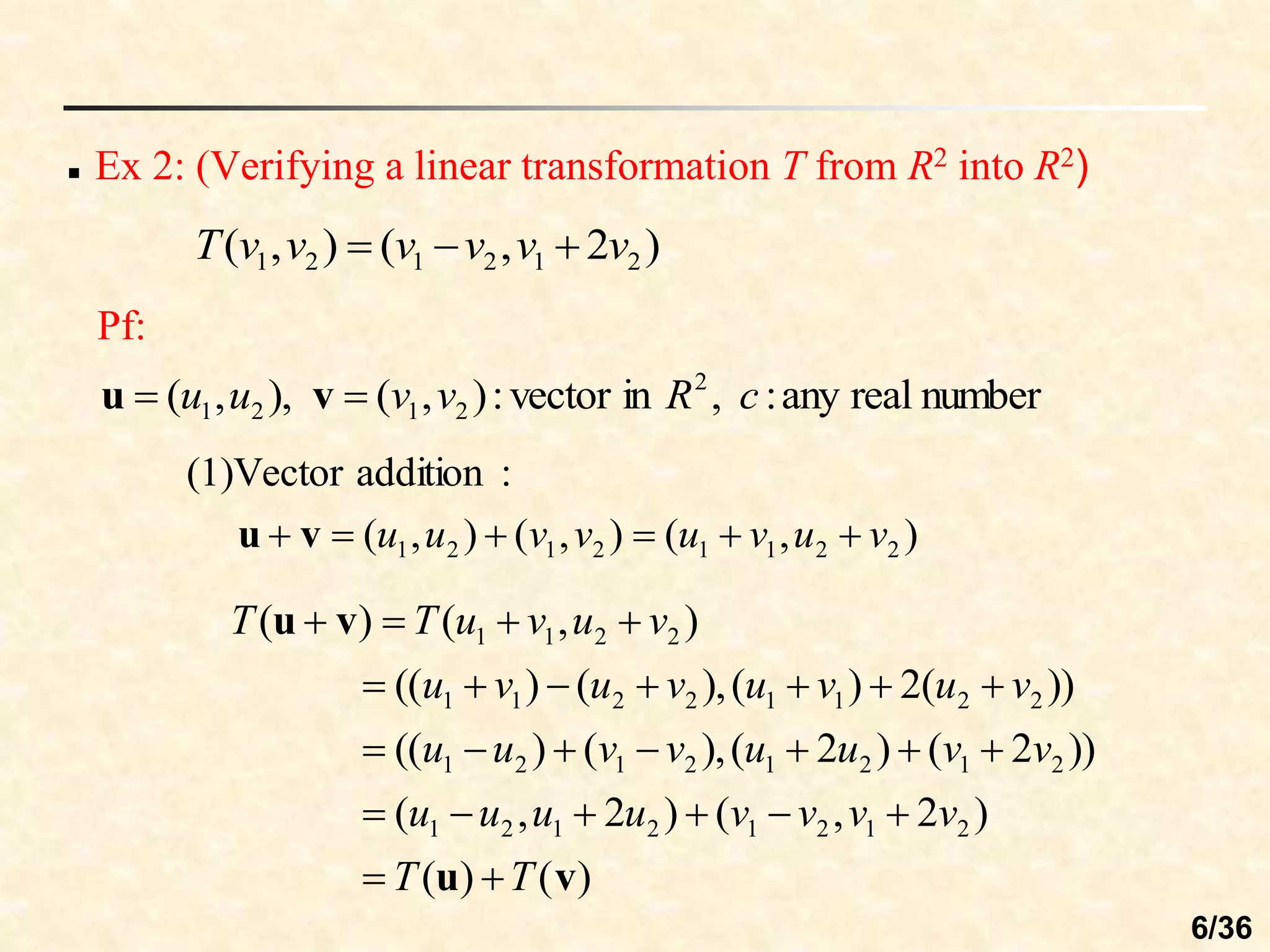
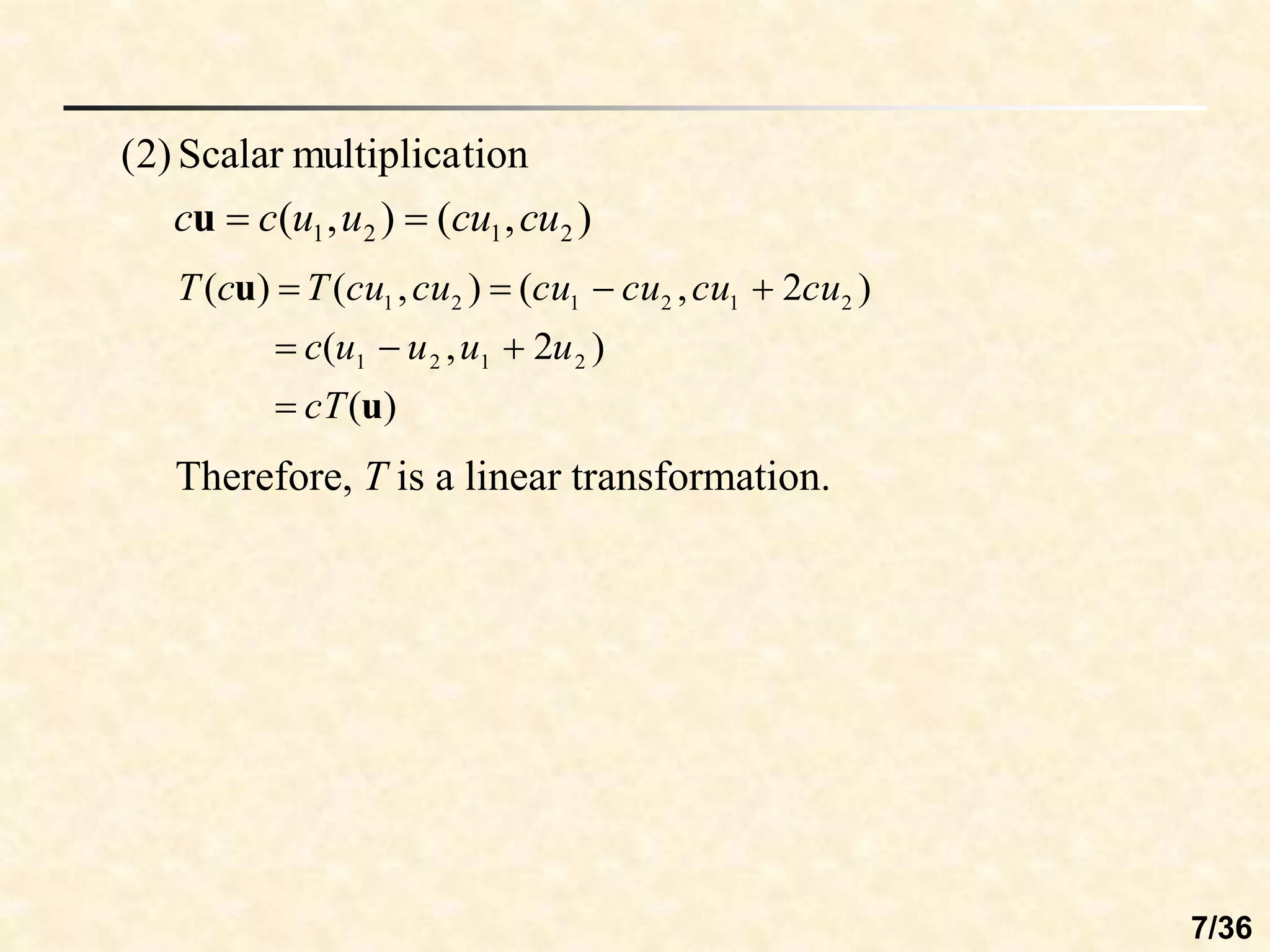
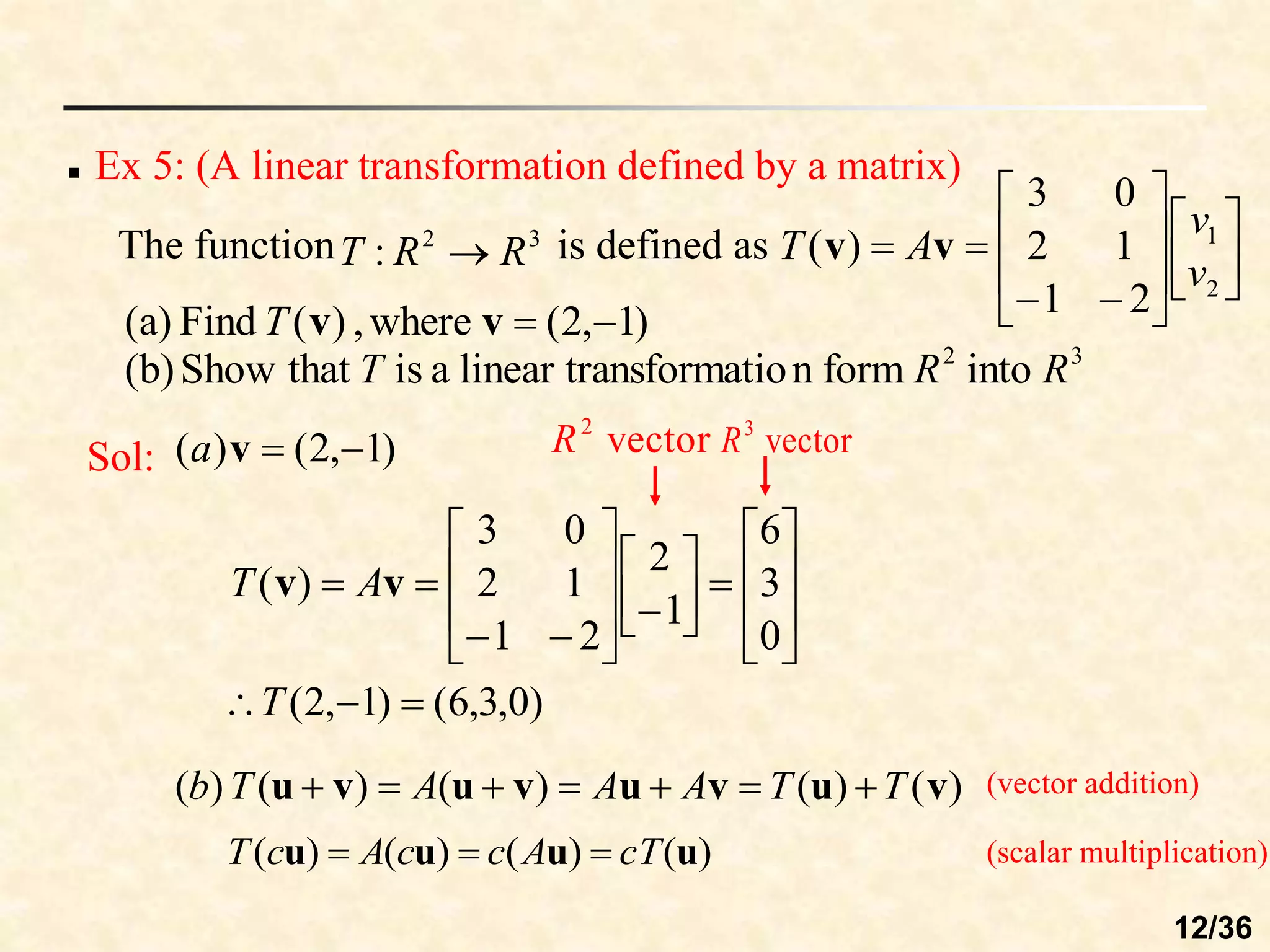
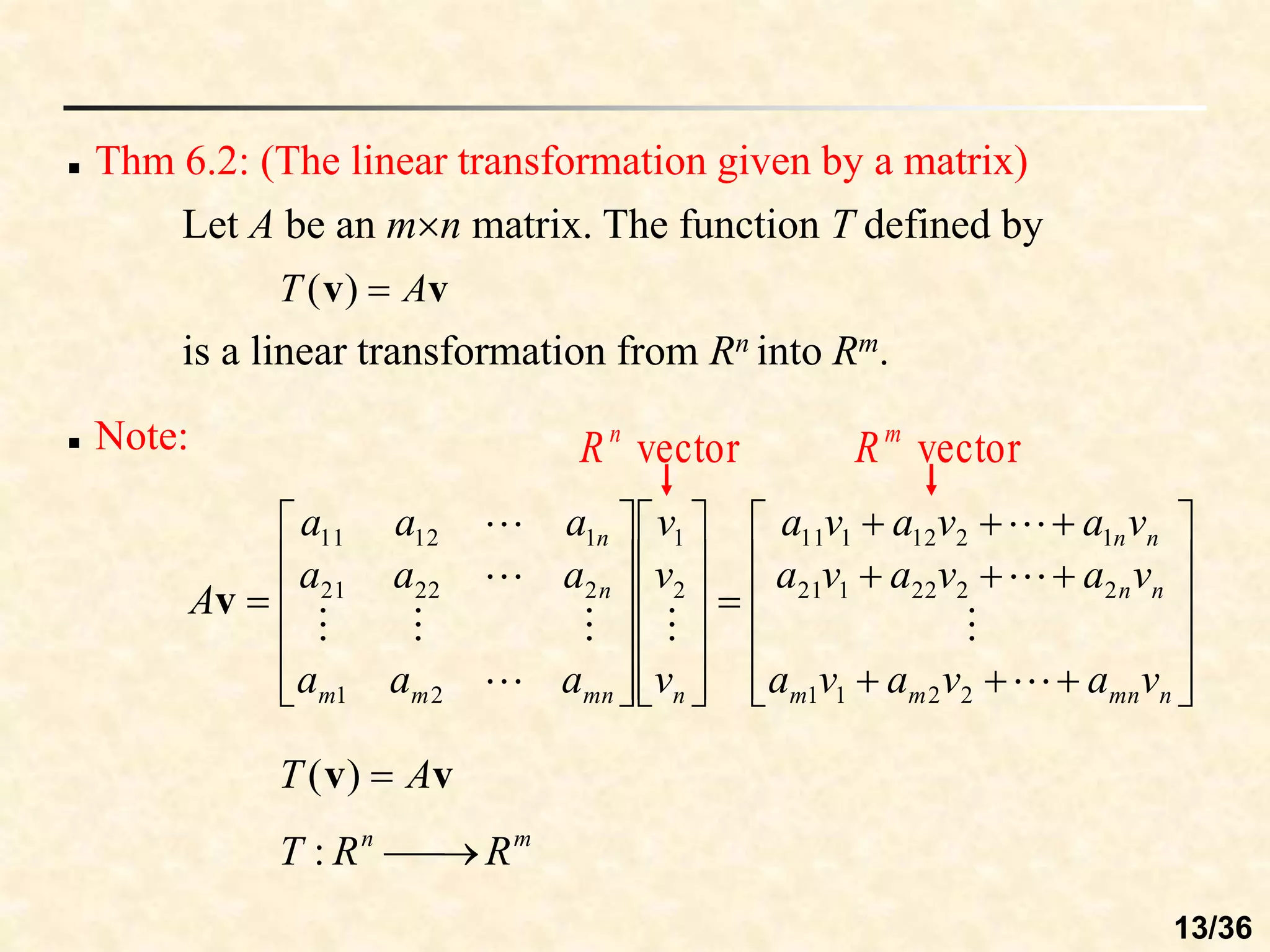
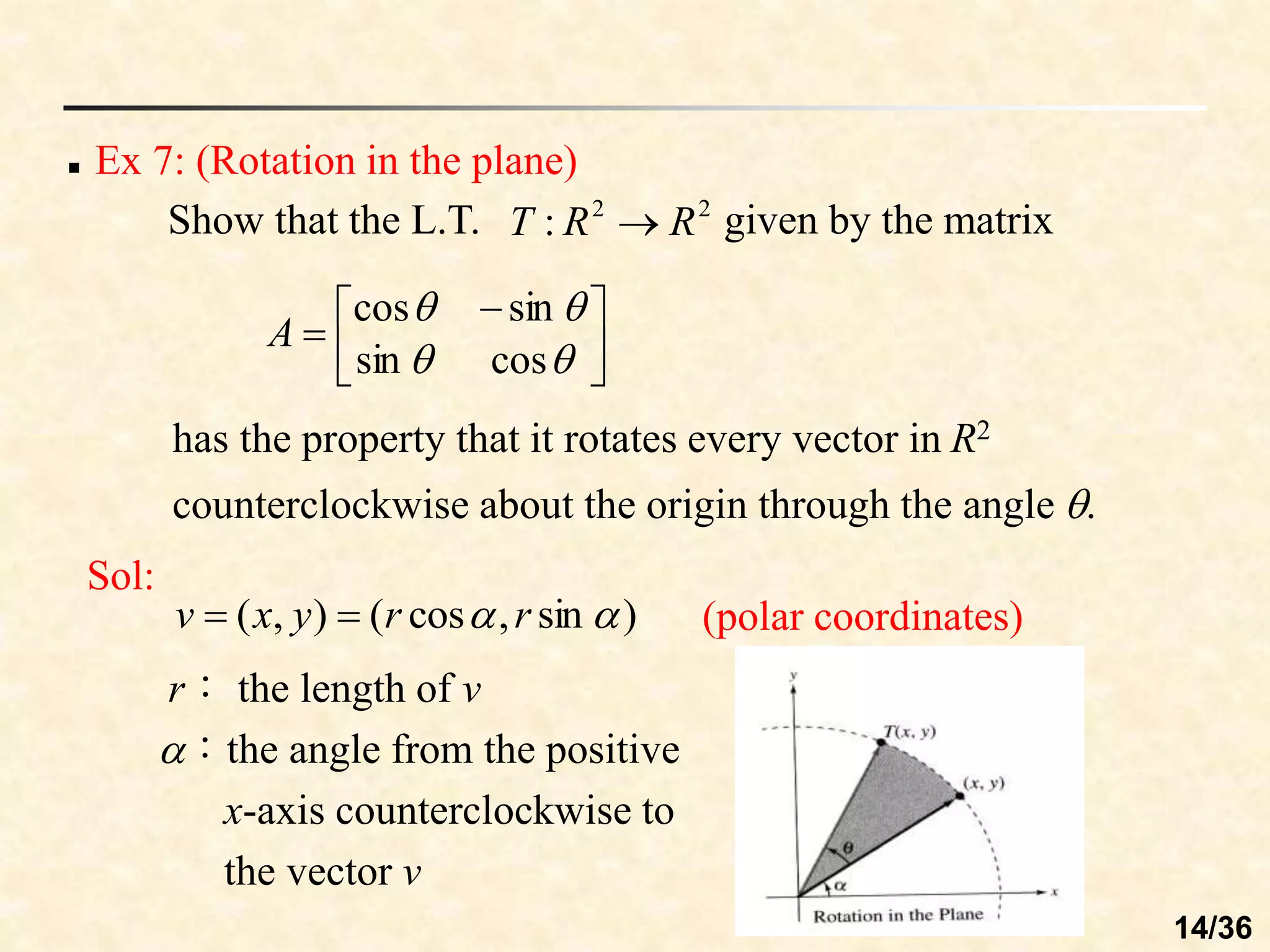
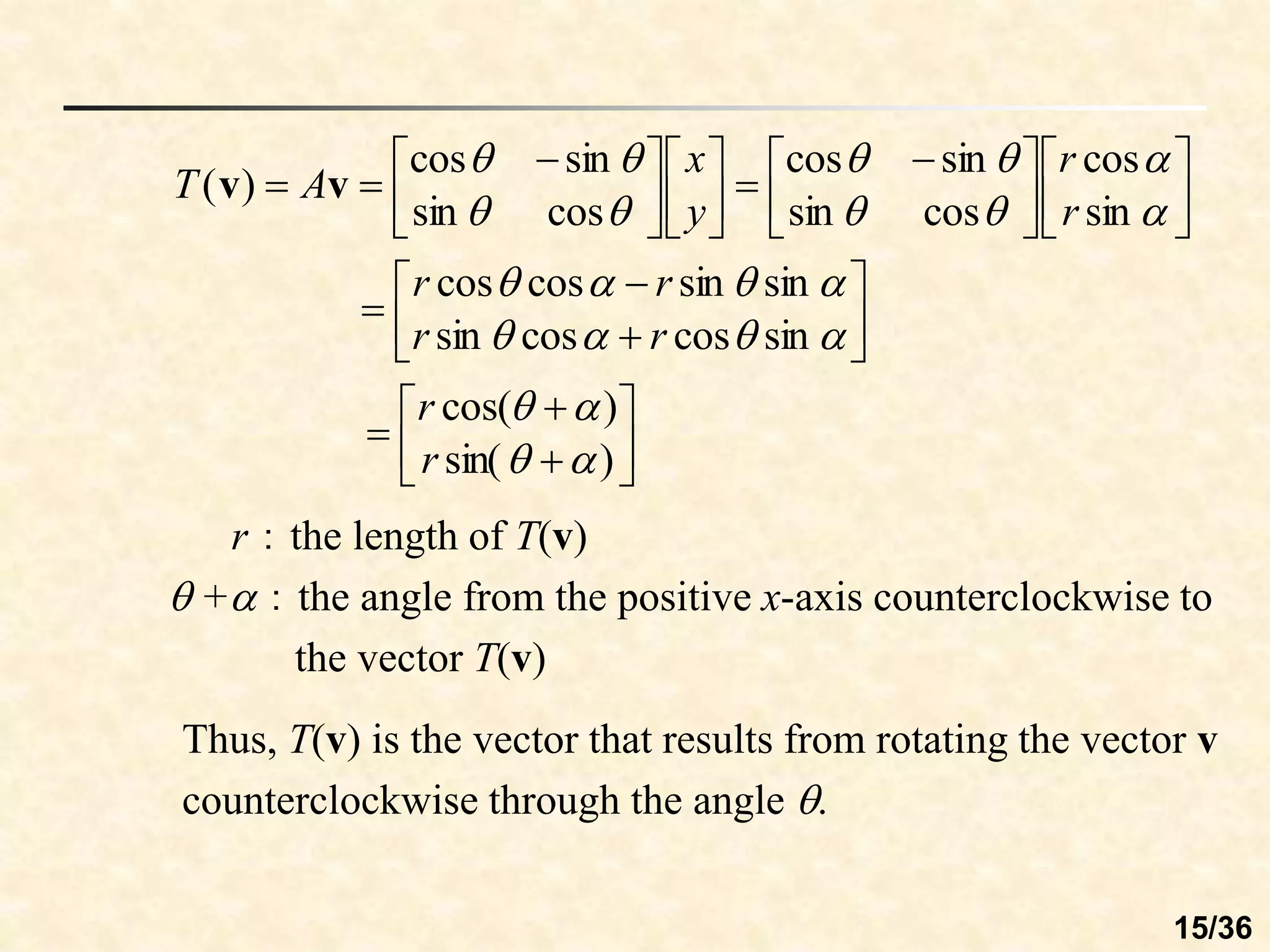
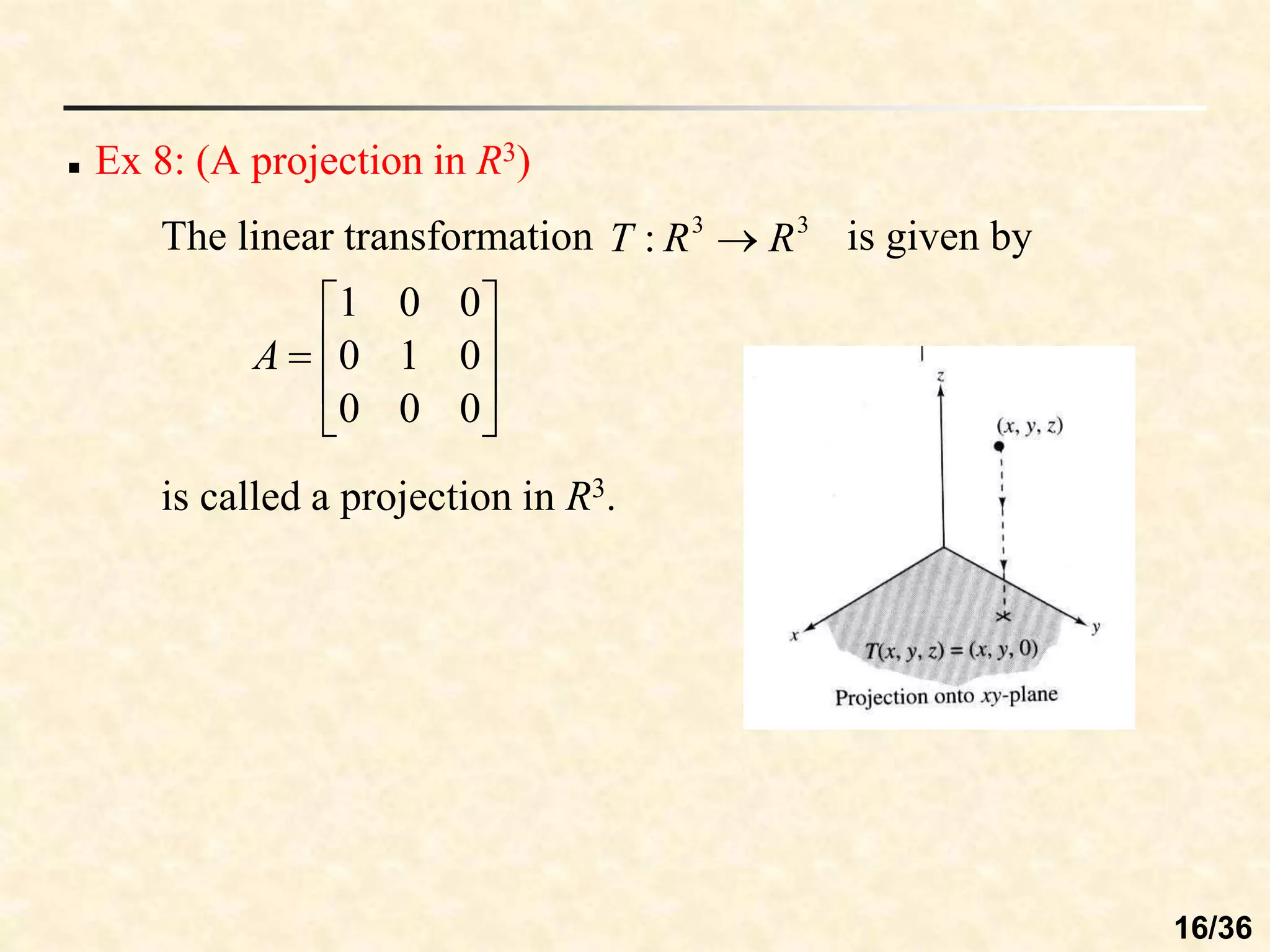
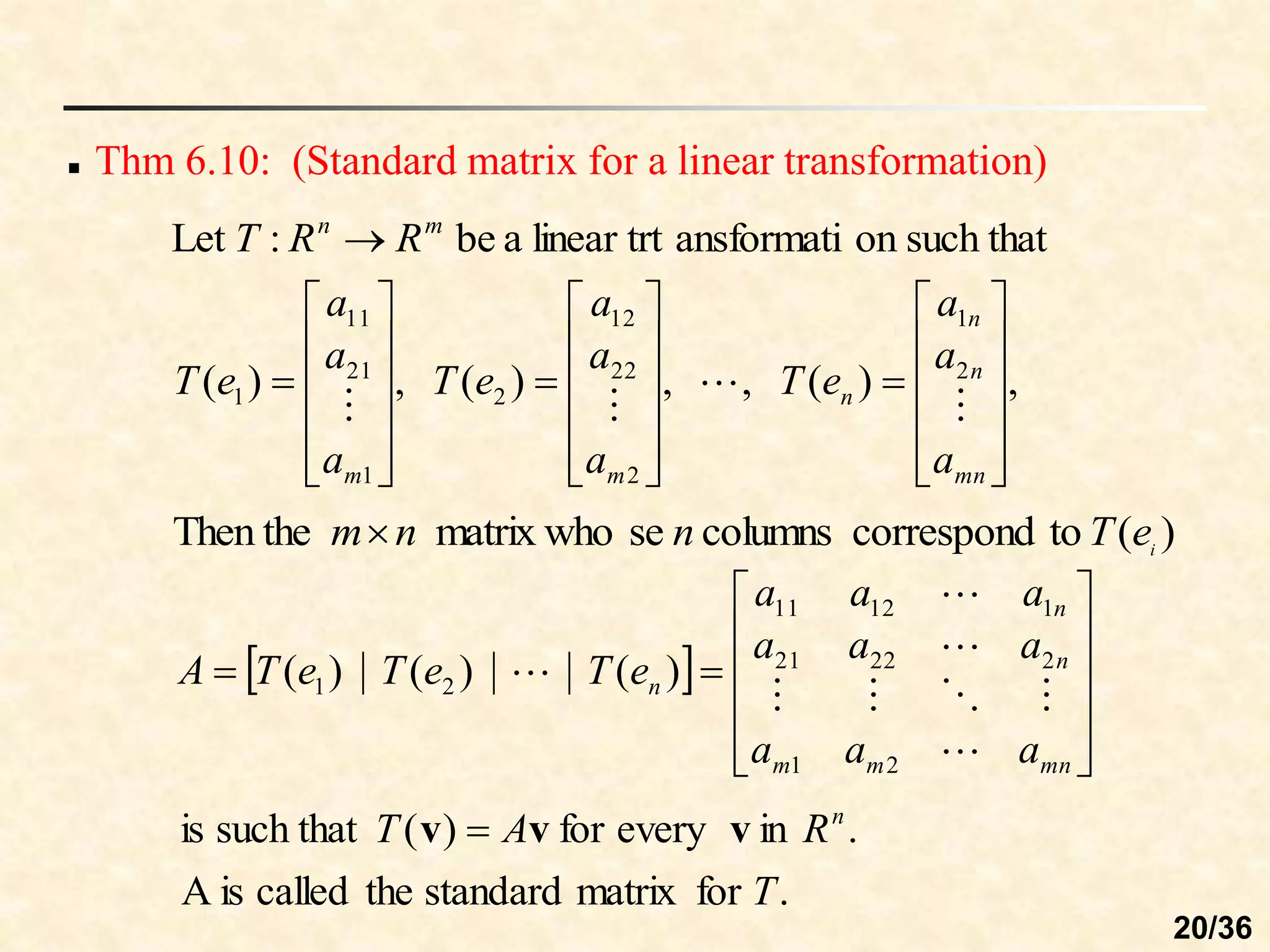
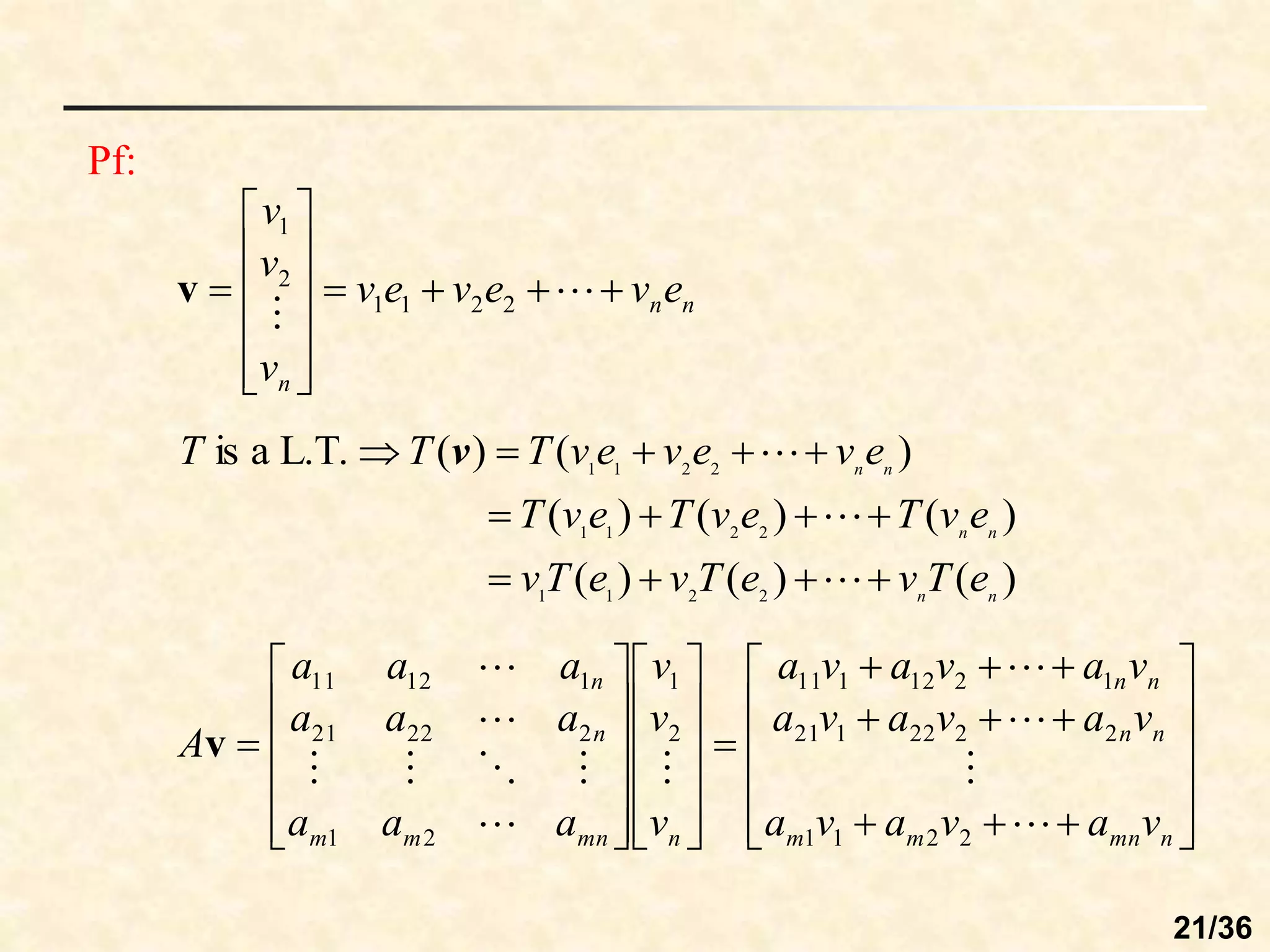
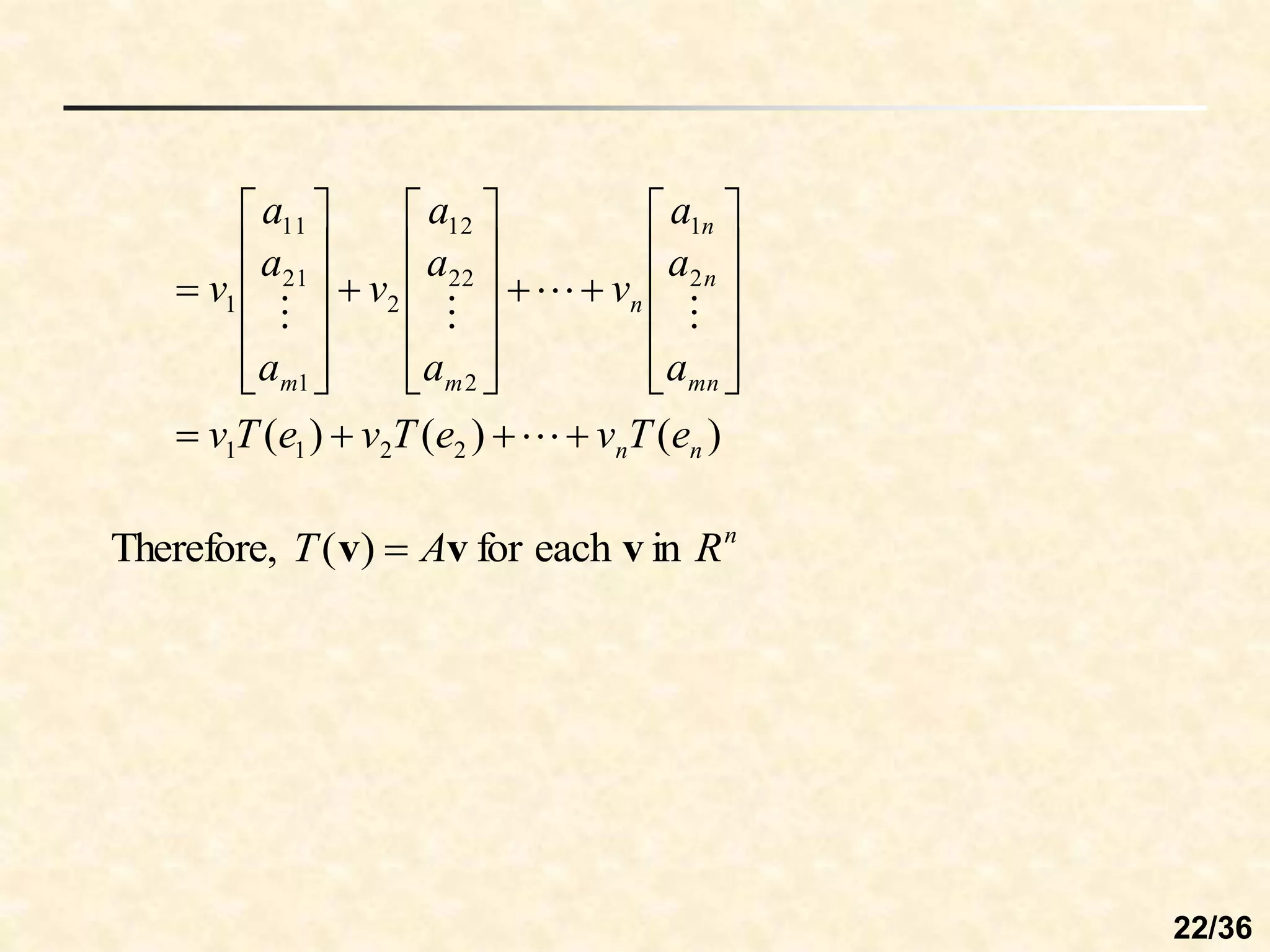
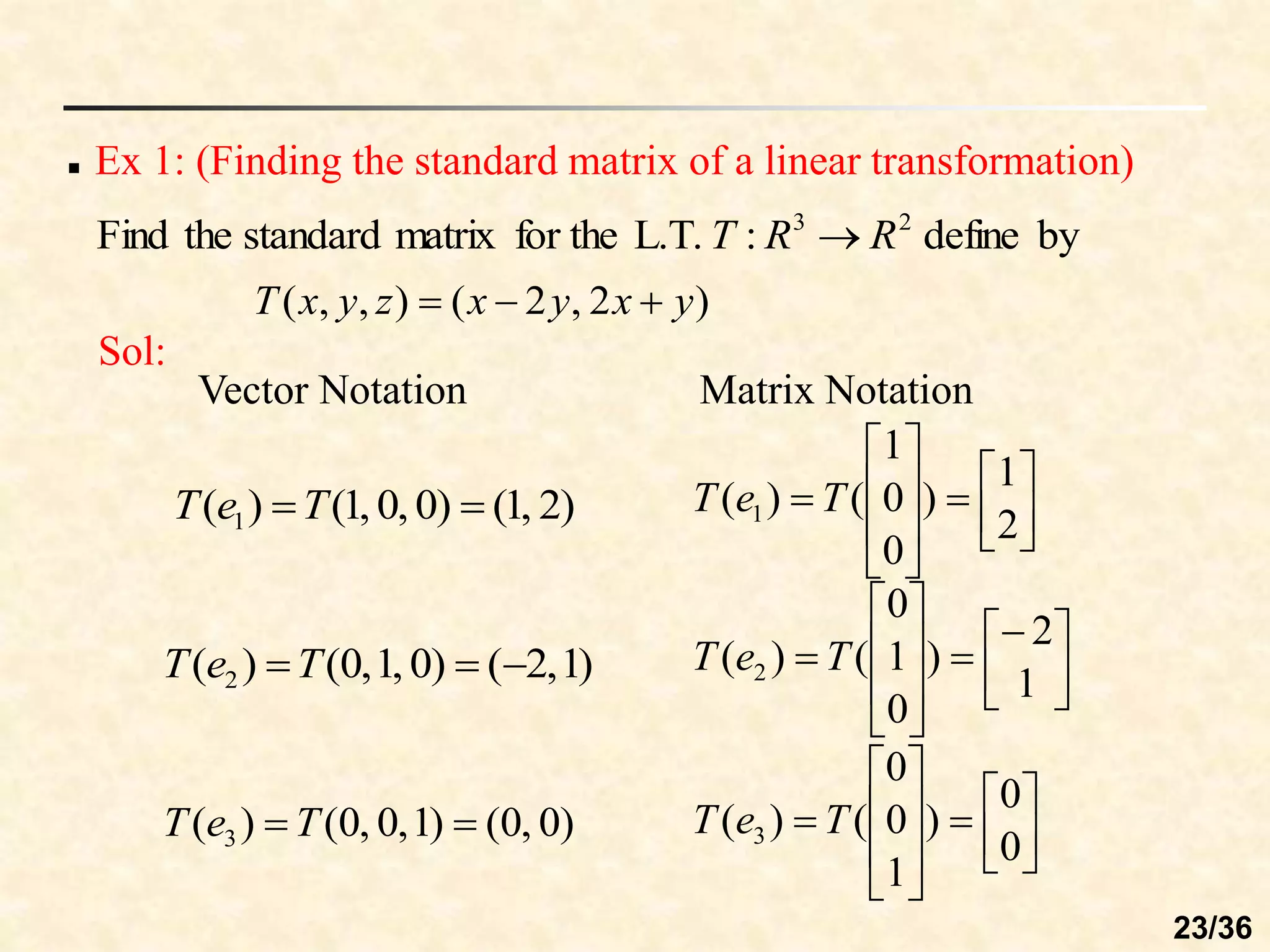
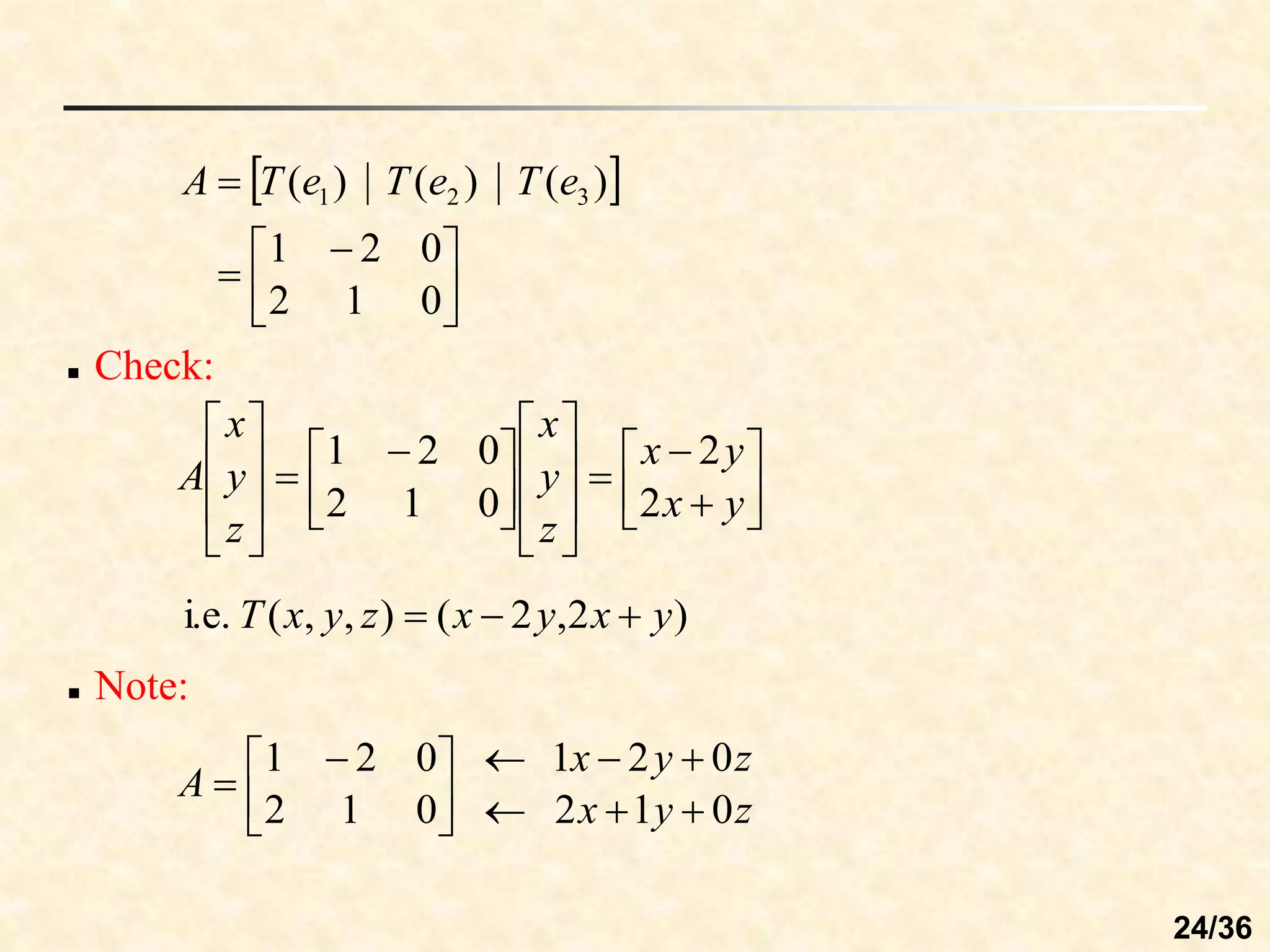
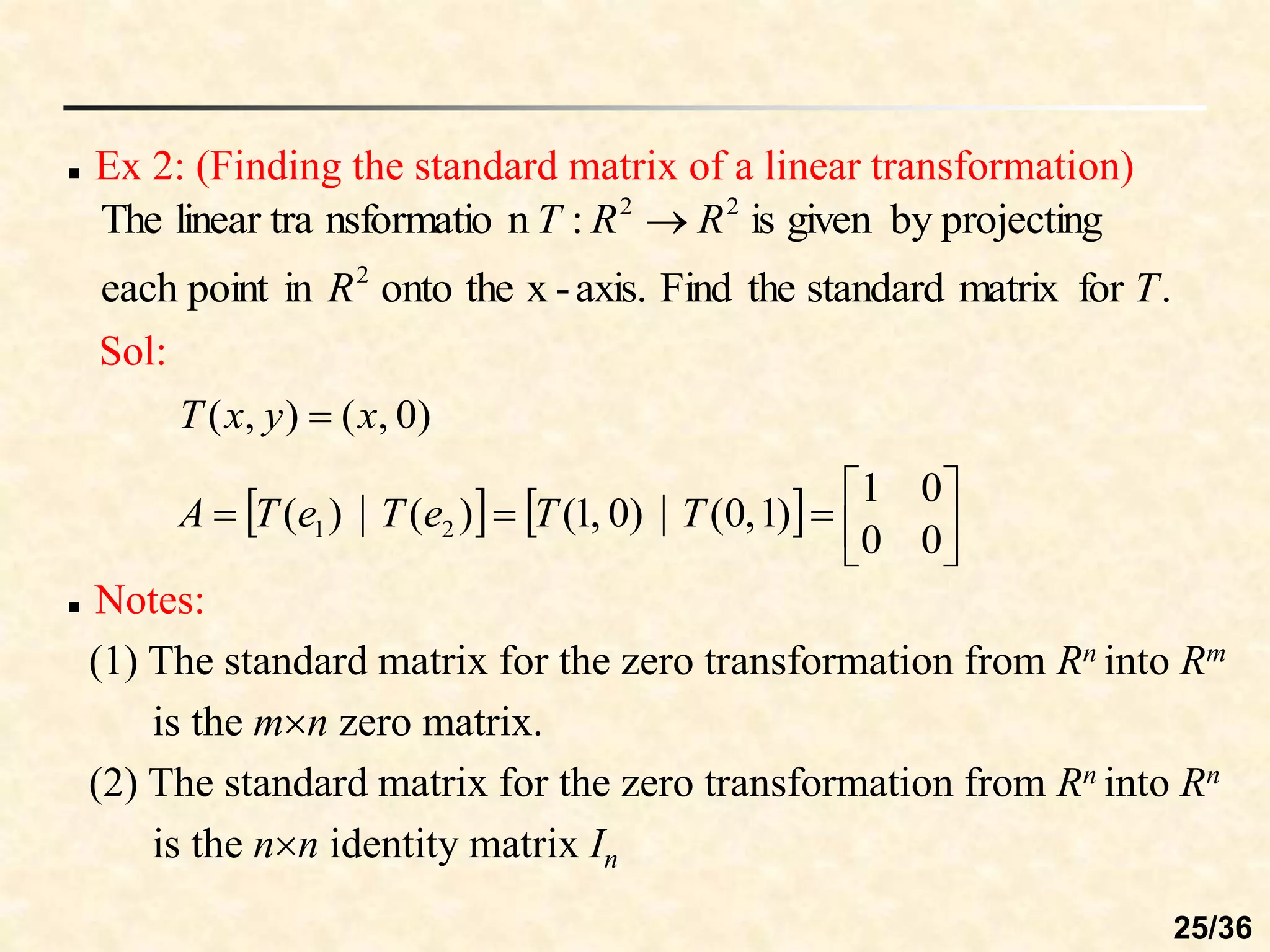
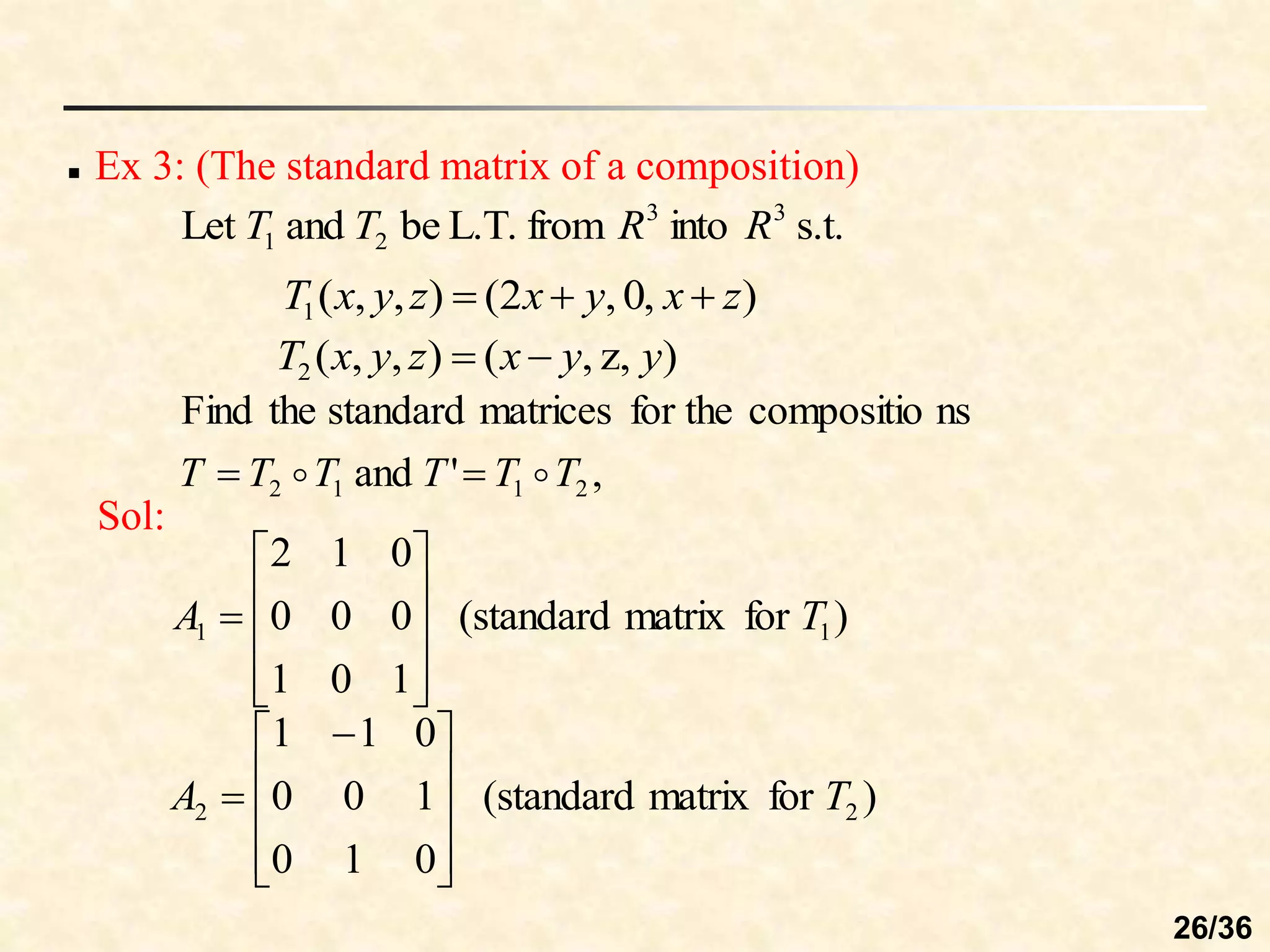
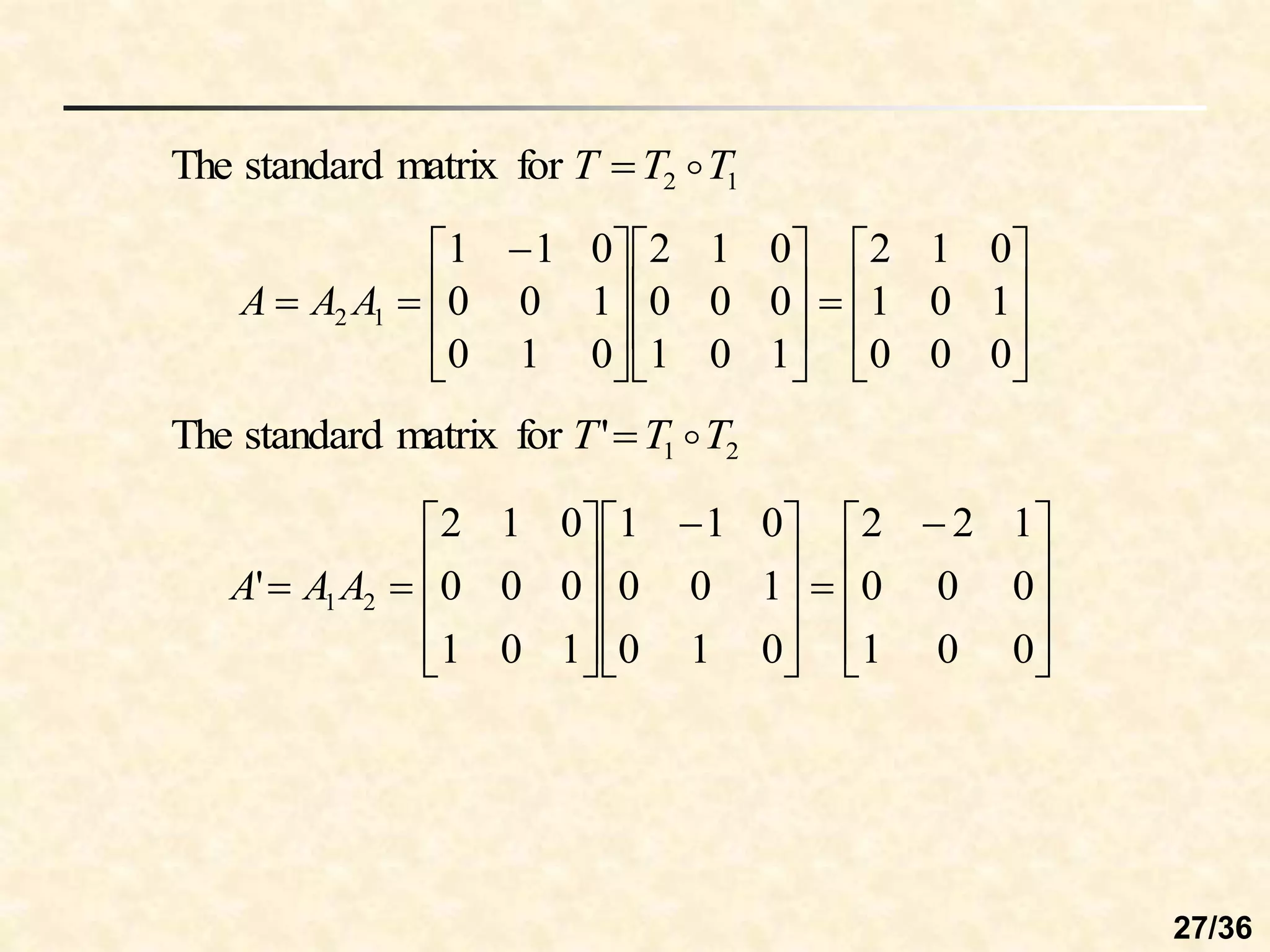
The document discusses linear transformations between vector spaces. It defines key concepts such as the domain, codomain, image, and preimage of a transformation. A linear transformation preserves vector addition and scalar multiplication. Any function defined by a matrix T(v) = Av is a linear transformation from Rn to Rm. The matrix representing a linear transformation describes how it rotates vectors in the plane.