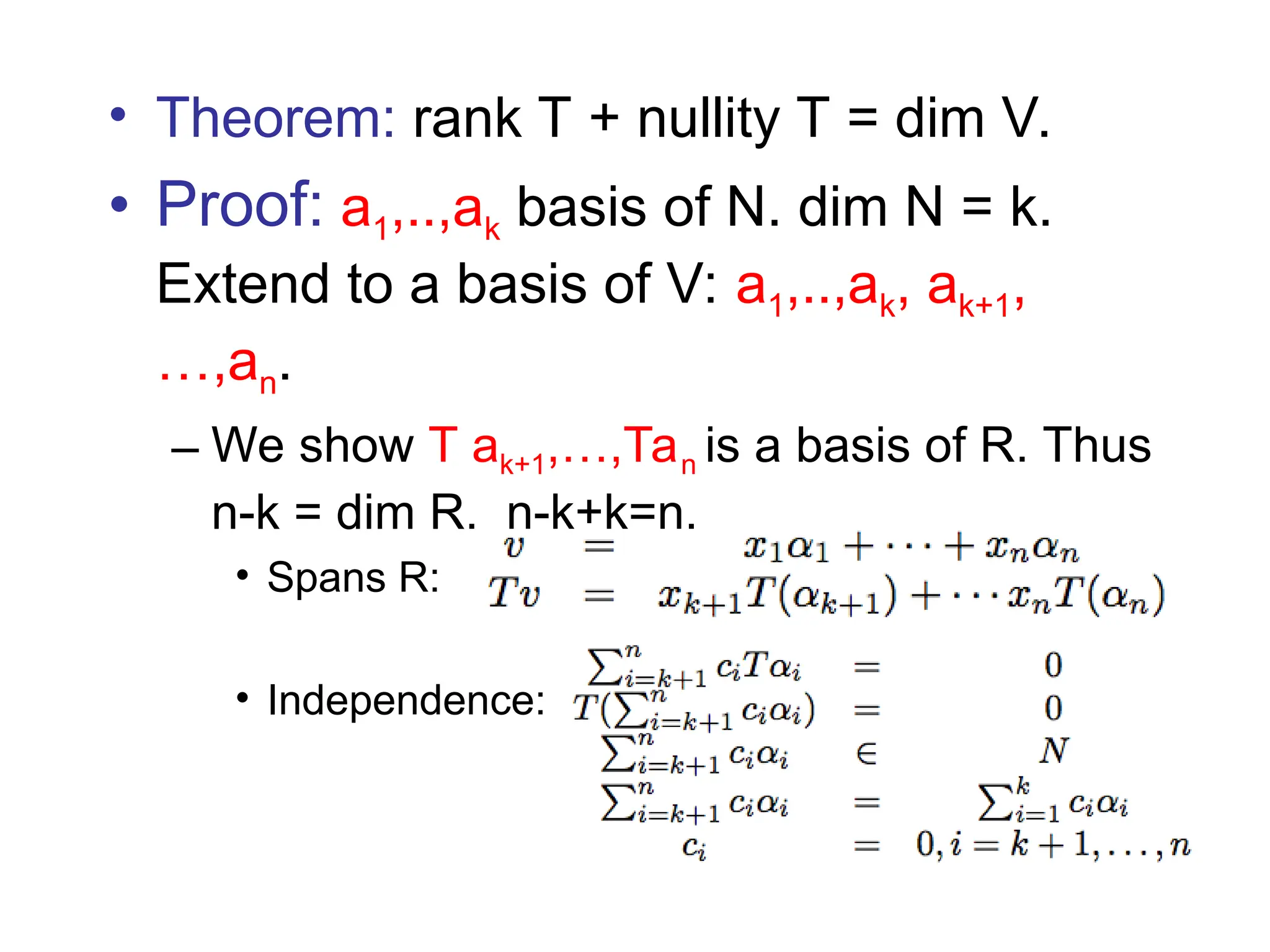
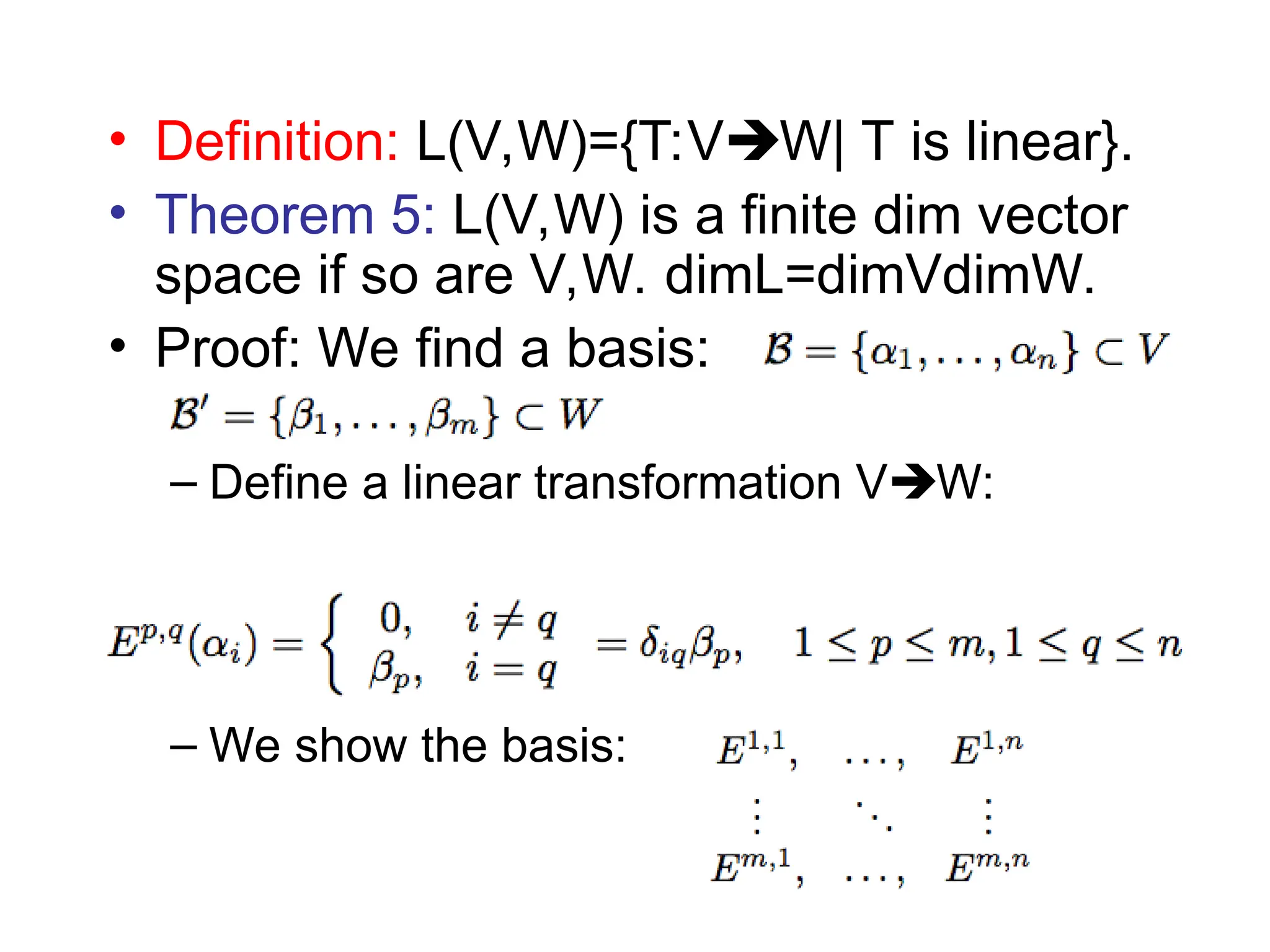
Chapter 3 discusses linear transformations, defining them in the context of vector spaces and matrices, and exploring properties like null space, range, rank, and nullity. It delves into the algebra of linear transformations, emphasizing their behavior under addition and scalar multiplication, while also discussing concepts such as invertibility and isomorphisms. The chapter includes multiple theorems and examples to illustrate the foundational principles of linear algebra.