Download to read offline


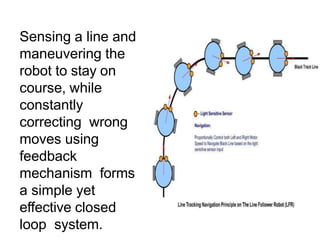
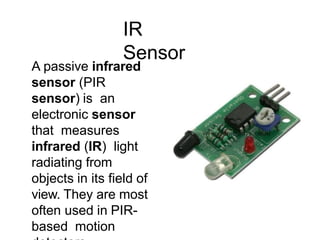
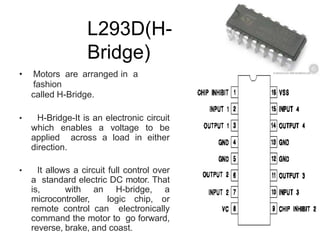
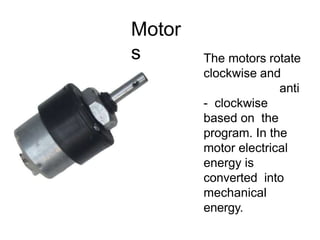
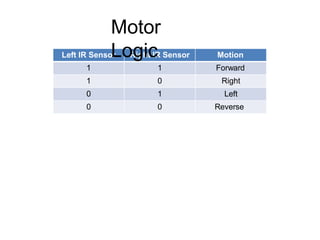
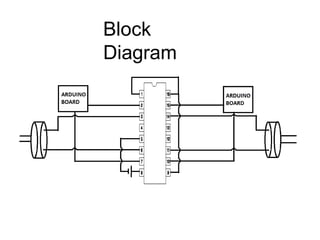
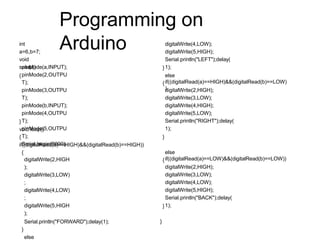

This document discusses the components, working principle, and programming of a line following robot. It contains the following key points: 1) The main components of the line following robot are an Arduino, IR sensors, an L293D motor driver, motors, and a chassis. The IR sensors detect a dark line on a light surface and signal the motors to move via the Arduino. 2) The working principle involves the IR sensors detecting the line and signaling the appropriate motors to run or stop via the Arduino, causing the robot to follow the line. Turning is achieved by stopping one motor and running the other. 3) Programming on the Arduino involves setting the motors and sensors as inputs/