Downloaded 22 times

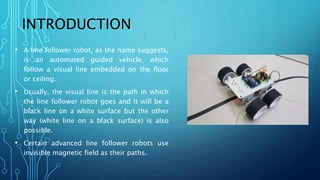
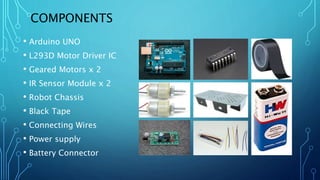
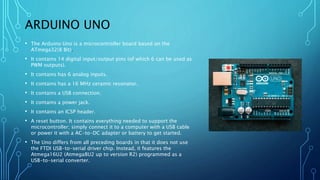
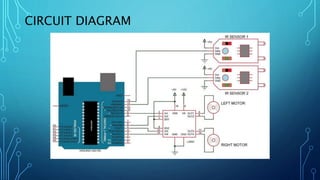
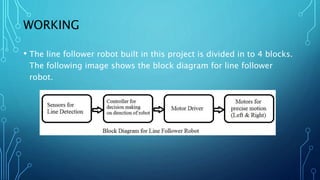
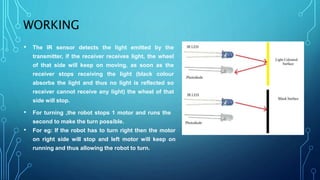

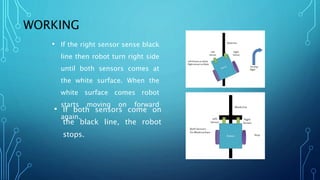
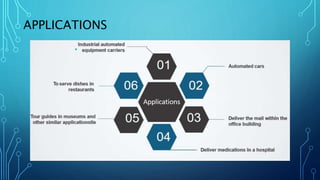

The document describes the components, working, and applications of a line following robot. It consists of the following key components: IR sensors to detect the line, an Arduino UNO microcontroller, an L293D motor driver IC, and two geared motors. The IR sensors detect the visual line on the floor and send signals to the Arduino, which uses the motor driver IC to control the direction of the two motors accordingly. The line following robot is able to follow the line path, make turns when detecting breaks in the line, and has applications in industrial automation.























































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)










