Download as PDF, PPTX
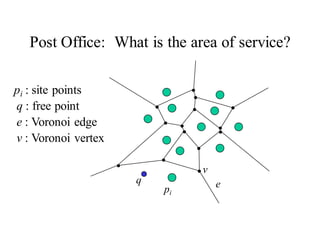
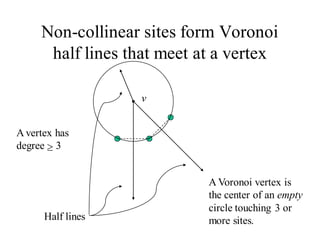

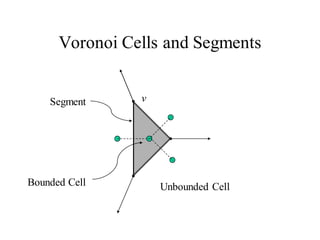
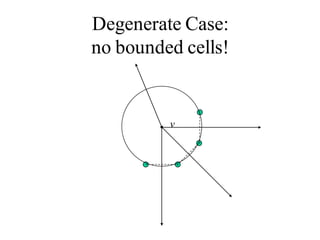
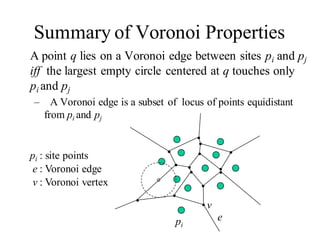
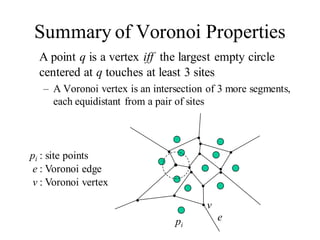
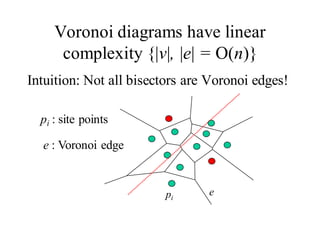
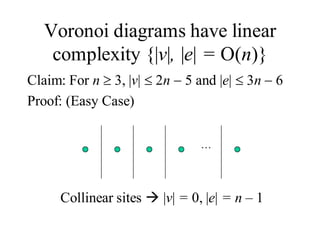
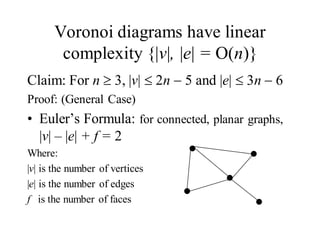
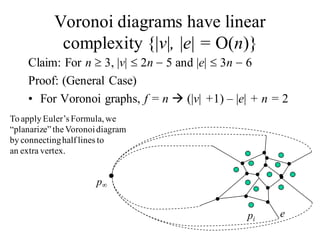
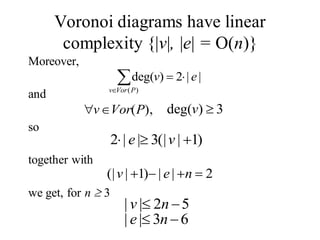
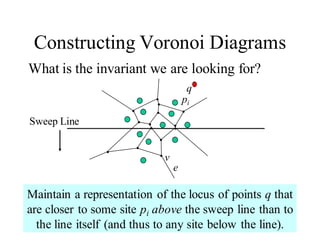
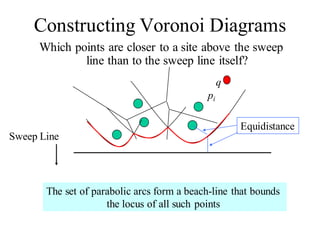
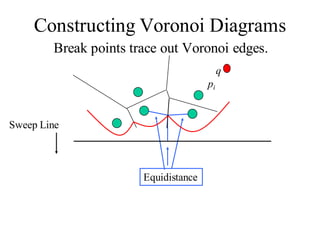
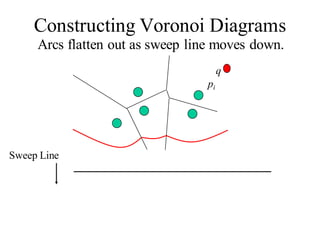
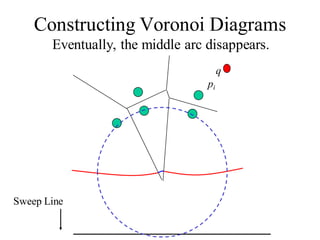
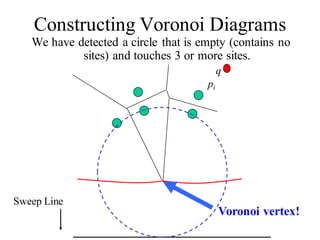
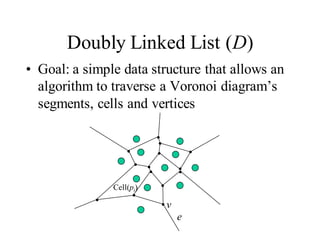
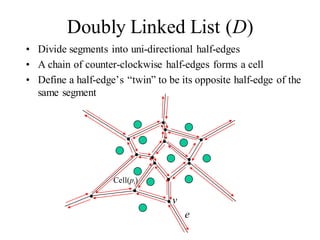
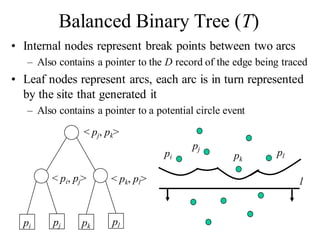
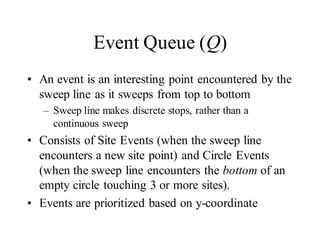
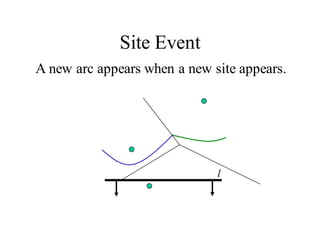
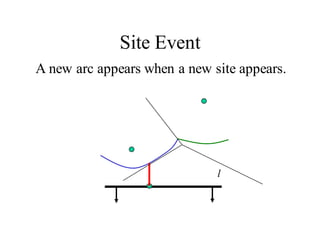
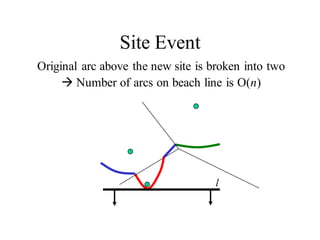
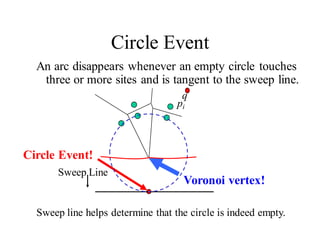
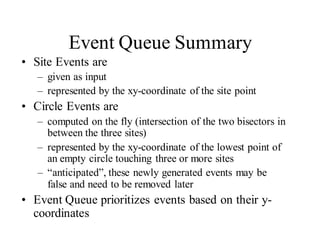
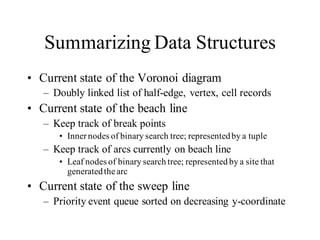
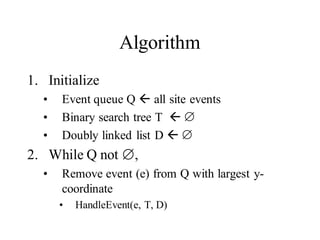
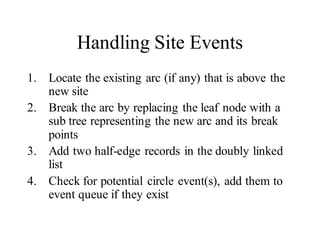
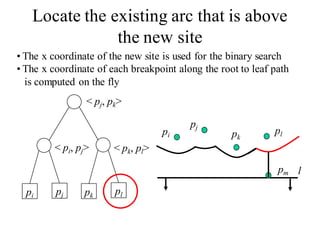
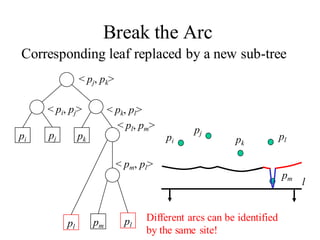
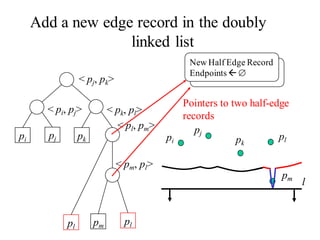
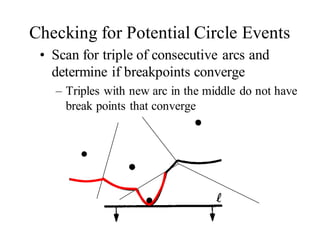
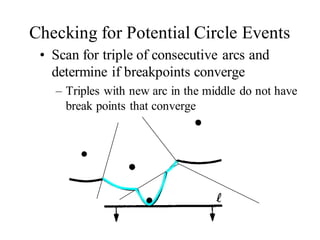
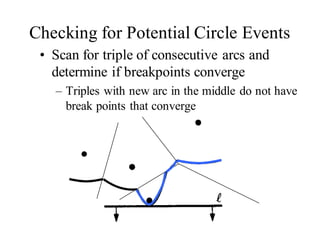
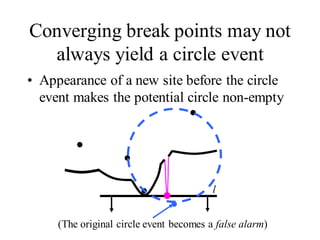
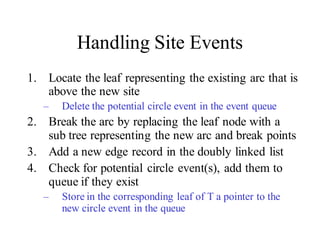
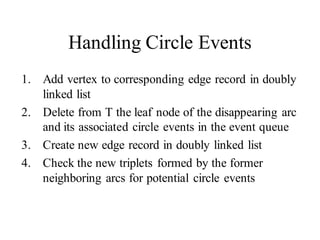
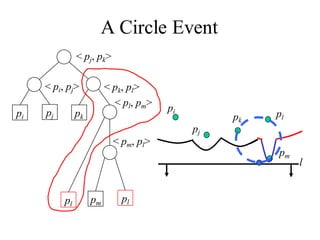
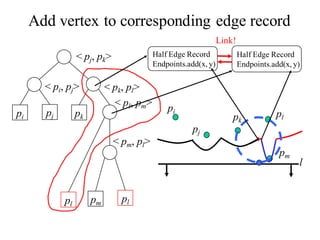
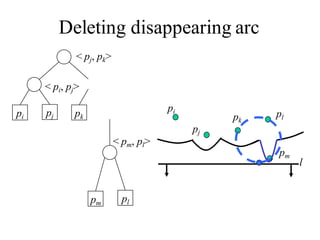
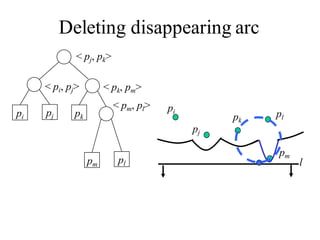
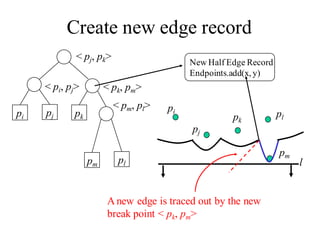
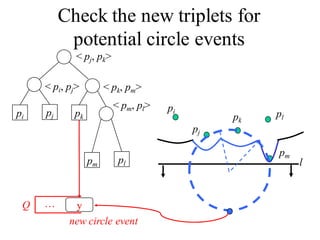
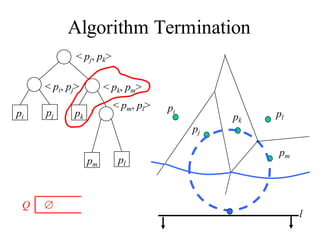
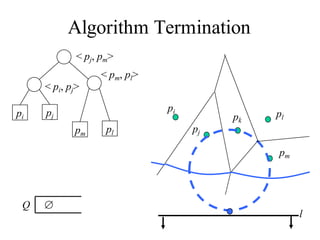
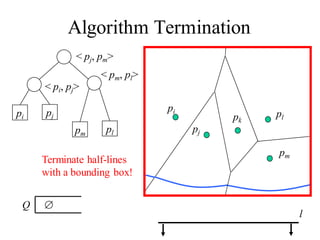
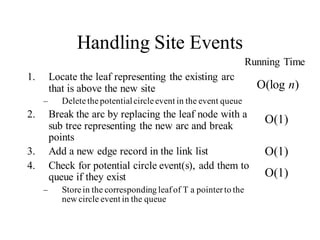
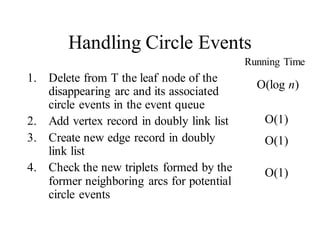
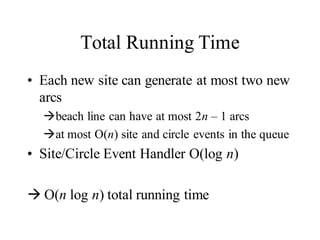
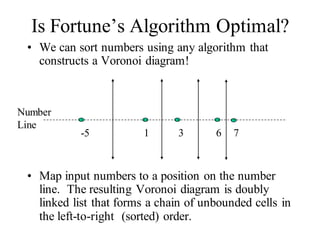
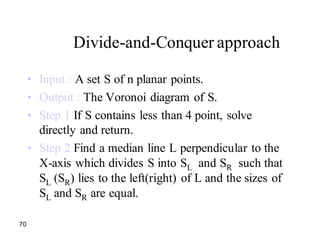
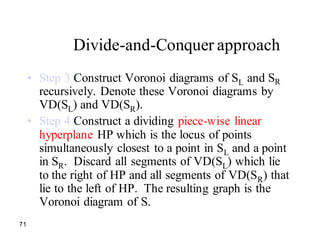
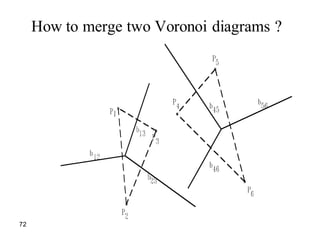
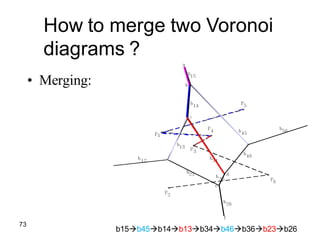
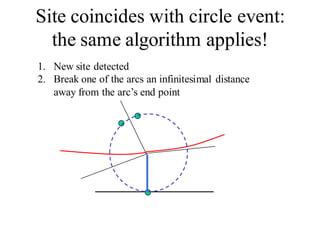
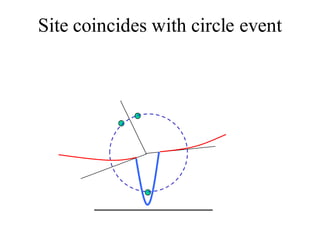

The document describes Voronoi diagrams and an algorithm for constructing them efficiently. Voronoi diagrams partition space into regions based on distance to points called sites. The algorithm uses a sweep line approach, maintaining the current state of the diagram. It handles events where the sweep line encounters a site or potential empty circle. The key data structures are a balanced binary search tree to represent the beach line, a doubly linked list to represent the constructed diagram, and a priority queue of events. The algorithm runs in O(n log n) time.


























































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)






