Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
KokuiSai
1,998 views
Image interpolation
some algorithms for image interpolation
Technology
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Downloaded 30 times
1
/ 14
2
/ 14
Most read
3
/ 14
4
/ 14
5
/ 14
6
/ 14
7
/ 14
8
/ 14
9
/ 14
10
/ 14
11
/ 14
12
/ 14
13
/ 14
14
/ 14
Most read
More Related Content
PDF
複数のGNSSを用いたポーズグラフ最適化
by
TaroSuzuki15
PDF
第8回関西CV・PRML勉強会(Meanshift)
by
Yutaka Yamada
DOCX
マハラノビス距離とユークリッド距離の違い
by
wada, kazumi
PPTX
画像処理ライブラリ OpenCV で 出来ること・出来ないこと
by
Norishige Fukushima
PDF
パターン認識と機械学習 §6.2 カーネル関数の構成
by
Prunus 1350
PDF
確率的主成分分析
by
Mika Yoshimura
PPTX
ParaViewでCSVの点群を表示する
by
RyogaSato1
PDF
Prml3.5 エビデンス近似〜
by
Yuki Matsubara
複数のGNSSを用いたポーズグラフ最適化
by
TaroSuzuki15
第8回関西CV・PRML勉強会(Meanshift)
by
Yutaka Yamada
マハラノビス距離とユークリッド距離の違い
by
wada, kazumi
画像処理ライブラリ OpenCV で 出来ること・出来ないこと
by
Norishige Fukushima
パターン認識と機械学習 §6.2 カーネル関数の構成
by
Prunus 1350
確率的主成分分析
by
Mika Yoshimura
ParaViewでCSVの点群を表示する
by
RyogaSato1
Prml3.5 エビデンス近似〜
by
Yuki Matsubara
What's hot
PPTX
Rによるベイジアンネットワーク入門
by
Okamoto Laboratory, The University of Electro-Communications
PDF
30th コンピュータビジョン勉強会@関東 DynamicFusion
by
Hiroki Mizuno
PDF
[DL輪読会]EdgeConnect: Generative Image Inpainting with Adversarial Edge Learning
by
Deep Learning JP
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
PPTX
AVX-512(フォーマット)詳解
by
MITSUNARI Shigeo
PPTX
[DL輪読会]Revisiting Deep Learning Models for Tabular Data (NeurIPS 2021) 表形式デー...
by
Deep Learning JP
PDF
Rでisomap(多様体学習のはなし)
by
Kohta Ishikawa
PDF
東京工業大学「ロボット技術」ロボットミドルウェア
by
NoriakiAndo
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
PCAの最終形態GPLVMの解説
by
弘毅 露崎
PDF
協調フィルタリングを利用した推薦システム構築
by
Masayuki Ota
PDF
Android/iOS端末におけるエッジ推論のチューニング
by
Deep Learning Lab(ディープラーニング・ラボ)
PDF
最新リリース:Optuna V3の全て - 2022/12/10 Optuna Meetup #2
by
Preferred Networks
PPTX
Prml 最尤推定からベイズ曲線フィッティング
by
takutori
PPTX
【DL輪読会】EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Pointsfor...
by
Deep Learning JP
PDF
実装レベルで学ぶVQVAE
by
ぱんいち すみもと
PDF
顕著性マップの推定手法
by
Takao Yamanaka
PDF
音声合成のコーパスをつくろう
by
Shinnosuke Takamichi
PDF
高速フーリエ変換
by
AtCoder Inc.
PDF
RAFT: Recurrent All-Pairs Field Transforms for Optical Flow
by
MasanoriSuganuma
Rによるベイジアンネットワーク入門
by
Okamoto Laboratory, The University of Electro-Communications
30th コンピュータビジョン勉強会@関東 DynamicFusion
by
Hiroki Mizuno
[DL輪読会]EdgeConnect: Generative Image Inpainting with Adversarial Edge Learning
by
Deep Learning JP
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
AVX-512(フォーマット)詳解
by
MITSUNARI Shigeo
[DL輪読会]Revisiting Deep Learning Models for Tabular Data (NeurIPS 2021) 表形式デー...
by
Deep Learning JP
Rでisomap(多様体学習のはなし)
by
Kohta Ishikawa
東京工業大学「ロボット技術」ロボットミドルウェア
by
NoriakiAndo
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PCAの最終形態GPLVMの解説
by
弘毅 露崎
協調フィルタリングを利用した推薦システム構築
by
Masayuki Ota
Android/iOS端末におけるエッジ推論のチューニング
by
Deep Learning Lab(ディープラーニング・ラボ)
最新リリース:Optuna V3の全て - 2022/12/10 Optuna Meetup #2
by
Preferred Networks
Prml 最尤推定からベイズ曲線フィッティング
by
takutori
【DL輪読会】EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Pointsfor...
by
Deep Learning JP
実装レベルで学ぶVQVAE
by
ぱんいち すみもと
顕著性マップの推定手法
by
Takao Yamanaka
音声合成のコーパスをつくろう
by
Shinnosuke Takamichi
高速フーリエ変換
by
AtCoder Inc.
RAFT: Recurrent All-Pairs Field Transforms for Optical Flow
by
MasanoriSuganuma
Viewers also liked
PPTX
Image Interpolation Techniques with Optical and Digital Zoom Concepts
by
mmjalbiaty
PDF
Image Interpolation
by
ThomasUnivalor
PPTX
Data hiding using image interpolation
by
Vikrant Arya
PDF
Image Interpolation Techniques with Optical and Digital Zoom Concepts -semina...
by
mmjalbiaty
PPTX
Interpolation and extrapolation
by
Aswin Pv
PDF
Interpolation Methods
by
Mohammad Tawfik
PPT
Interpolation
by
mbhuiya6
PDF
interpolation
by
8laddu8
PPTX
3D transformation in computer graphics
by
SHIVANI SONI
PPTX
Retinex comparisons
by
Yongwoo Jeong
PDF
Effective Pixel Interpolation for Image Super Resolution
by
IOSR Journals
PDF
Cv 14th
by
Junichi Ido
PPTX
Satellite image contrast enhancement using discrete wavelet transform
by
Harishwar Reddy
PPT
Satellite Image
by
Prajjwal Paudel
PPTX
image denoising technique using disctere wavelet transform
by
alishapb
PDF
Report medical image processing image slice interpolation and noise removal i...
by
Shashank
PPTX
Wavelet Transform and DSP Applications
by
University of Technology - Iraq
PPTX
Image filtering : A comparitive study
by
pruthabhalde3
PPTX
Signal and image processing on satellite communication using MATLAB
by
Embedded Plus Trichy
DOCX
final_project
by
Inderpreet Kaur
Image Interpolation Techniques with Optical and Digital Zoom Concepts
by
mmjalbiaty
Image Interpolation
by
ThomasUnivalor
Data hiding using image interpolation
by
Vikrant Arya
Image Interpolation Techniques with Optical and Digital Zoom Concepts -semina...
by
mmjalbiaty
Interpolation and extrapolation
by
Aswin Pv
Interpolation Methods
by
Mohammad Tawfik
Interpolation
by
mbhuiya6
interpolation
by
8laddu8
3D transformation in computer graphics
by
SHIVANI SONI
Retinex comparisons
by
Yongwoo Jeong
Effective Pixel Interpolation for Image Super Resolution
by
IOSR Journals
Cv 14th
by
Junichi Ido
Satellite image contrast enhancement using discrete wavelet transform
by
Harishwar Reddy
Satellite Image
by
Prajjwal Paudel
image denoising technique using disctere wavelet transform
by
alishapb
Report medical image processing image slice interpolation and noise removal i...
by
Shashank
Wavelet Transform and DSP Applications
by
University of Technology - Iraq
Image filtering : A comparitive study
by
pruthabhalde3
Signal and image processing on satellite communication using MATLAB
by
Embedded Plus Trichy
final_project
by
Inderpreet Kaur
Similar to Image interpolation
PDF
実践コンピュータビジョン 3章 画像間の写像
by
yaju88
PDF
内部拘束を持つ3 次元運動の最適計算法と幾何学的モデル選択への応用ViEW2012論文
by
doboncho
PDF
Ibisml2011 06-20
by
Yasuo Tabei
PPTX
Kantocv 2-1-calibration publish
by
tomoaki0705
PPTX
SSII2014 チュートリアル資料
by
Masayuki Tanaka
PPTX
CG2013 06
by
shiozawa_h
PDF
Taking a Deeper Look at the Inverse Compositional Algorithm
by
Mai Nishimura
PDF
文献紹介:CutDepth: Edge-aware Data Augmentation in Depth Estimation
by
Toru Tamaki
PDF
大規模地震シミュレーション1
by
RCCSRENKEI
PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
PDF
最近傍探索と直積量子化(Nearest neighbor search and Product Quantization)
by
Nguyen Tuan
PDF
CMSI計算科学技術特論A (2015) 第10回 行列計算における高速アルゴリズム1
by
Computational Materials Science Initiative
PDF
El text.tokuron a(2019).yamamoto190620
by
RCCSRENKEI
PDF
CVIM最先端ガイド6 幾何学的推定のための最適化手法 3.5 - 3.8
by
Fujimoto Keisuke
PDF
20110625 cv 3_3_5(shirasy)
by
Yoichi Shirasawa
PDF
CVIM#11 3. 最小化のための数値計算
by
sleepy_yoshi
PDF
2022年度秋学期 画像情報処理 第6回 ベクトルと行列について(講義前配付用) (2022. 10. 28)
by
Akira Asano
PDF
2次元/3次元幾何学変換の統一的な最適計算論文
by
doboncho
PDF
MIRU2016 チュートリアル
by
Shunsuke Ono
PDF
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
実践コンピュータビジョン 3章 画像間の写像
by
yaju88
内部拘束を持つ3 次元運動の最適計算法と幾何学的モデル選択への応用ViEW2012論文
by
doboncho
Ibisml2011 06-20
by
Yasuo Tabei
Kantocv 2-1-calibration publish
by
tomoaki0705
SSII2014 チュートリアル資料
by
Masayuki Tanaka
CG2013 06
by
shiozawa_h
Taking a Deeper Look at the Inverse Compositional Algorithm
by
Mai Nishimura
文献紹介:CutDepth: Edge-aware Data Augmentation in Depth Estimation
by
Toru Tamaki
大規模地震シミュレーション1
by
RCCSRENKEI
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
最近傍探索と直積量子化(Nearest neighbor search and Product Quantization)
by
Nguyen Tuan
CMSI計算科学技術特論A (2015) 第10回 行列計算における高速アルゴリズム1
by
Computational Materials Science Initiative
El text.tokuron a(2019).yamamoto190620
by
RCCSRENKEI
CVIM最先端ガイド6 幾何学的推定のための最適化手法 3.5 - 3.8
by
Fujimoto Keisuke
20110625 cv 3_3_5(shirasy)
by
Yoichi Shirasawa
CVIM#11 3. 最小化のための数値計算
by
sleepy_yoshi
2022年度秋学期 画像情報処理 第6回 ベクトルと行列について(講義前配付用) (2022. 10. 28)
by
Akira Asano
2次元/3次元幾何学変換の統一的な最適計算論文
by
doboncho
MIRU2016 チュートリアル
by
Shunsuke Ono
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
Image interpolation
1.
Image Interpolation 画像補間法 2015, by
sai@nac 崔 国偉(工学博士)
2.
補間方法リスト 「Nearest Neighbor法」
--- 省略 「Bilinear法」 「Bicubic法」 「Lanczos法」 「Spline法」 「Trilinear法」
3.
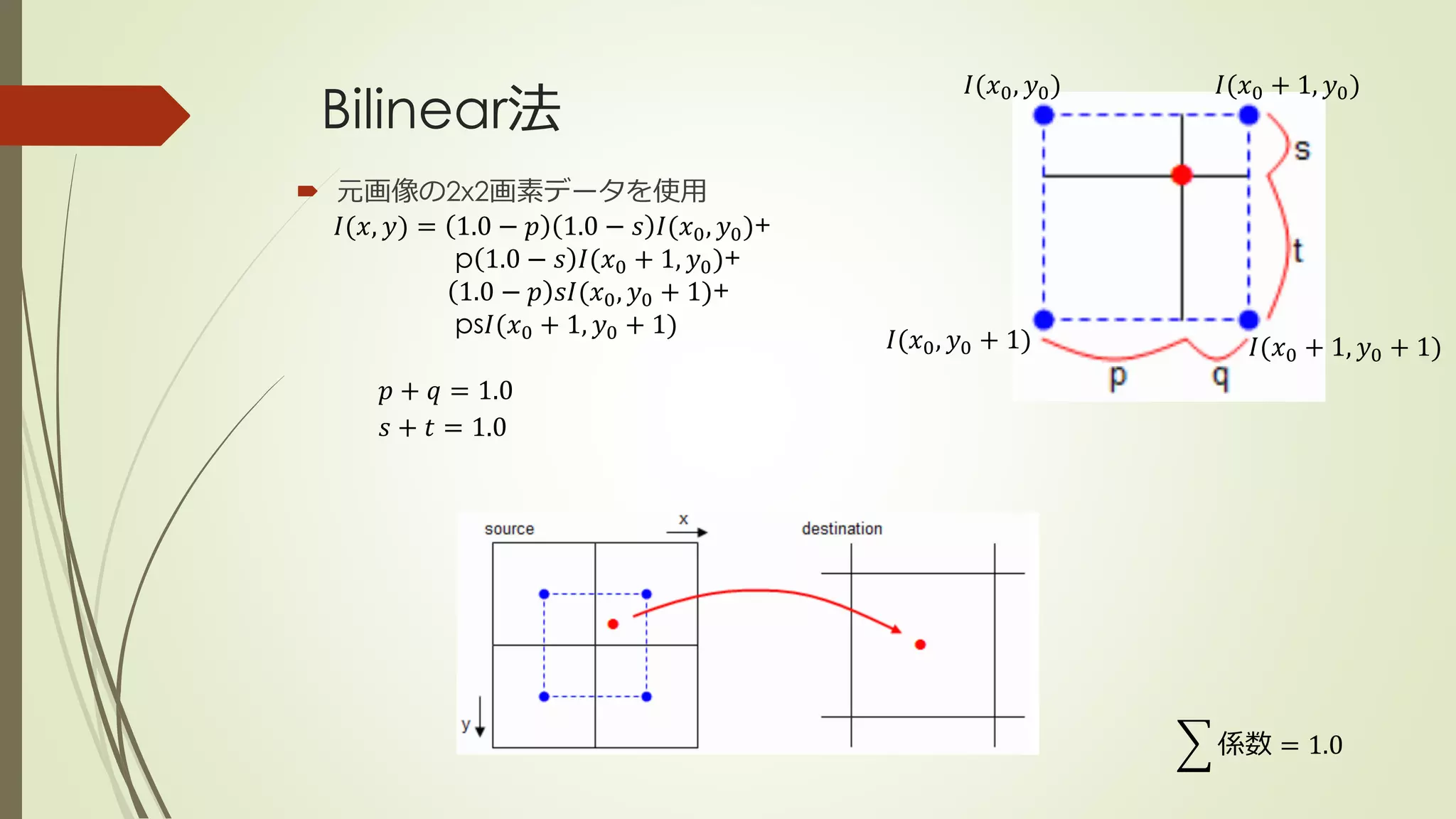
Bilinear法 𝐼(𝑥0, 𝑦0) 𝐼(𝑥0
+ 1, 𝑦0) 𝐼(𝑥0, 𝑦0 + 1) 𝐼(𝑥0 + 1, 𝑦0 + 1) 𝐼(𝑥, 𝑦) = 1.0 − 𝑝 1.0 − 𝑠 𝐼(𝑥0, 𝑦0)+ p 1.0 − 𝑠 𝐼(𝑥0 + 1, 𝑦0)+ 1.0 − 𝑝 𝑠𝐼(𝑥0, 𝑦0 + 1)+ ps𝐼(𝑥0 + 1, 𝑦0 + 1) 𝑝 + 𝑞 = 1.0 𝑠 + 𝑡 = 1.0 係数 = 1.0 元画像の2x2画素データを使用
4.
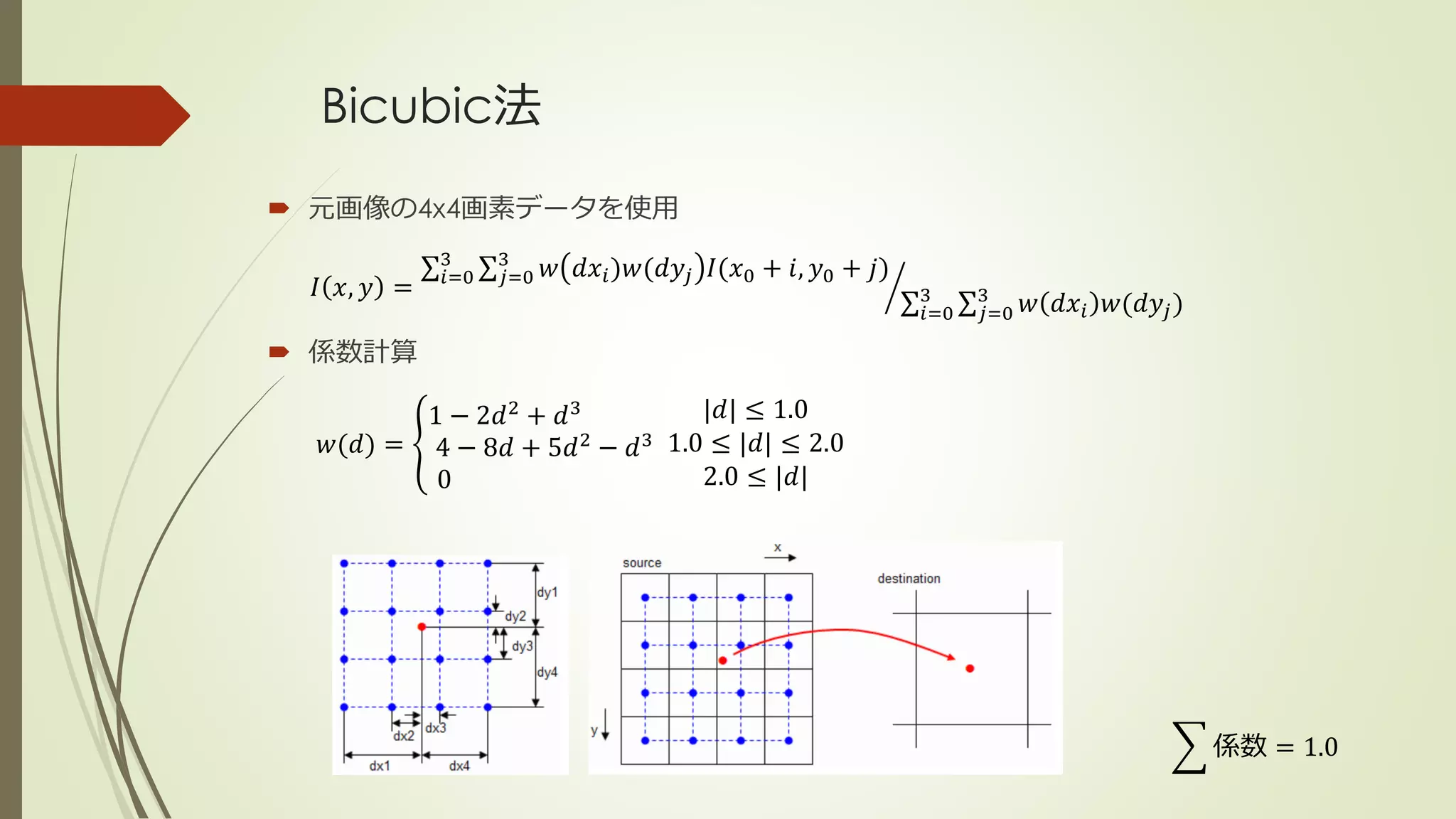
Bicubic法 元画像の4x4画素データを使用 係数計算 𝐼
𝑥, 𝑦 = 𝑖=0 3 𝑗=0 3 𝑤 𝑑𝑥𝑖)𝑤(𝑑𝑦𝑗 𝐼(𝑥0 + 𝑖, 𝑦0 + 𝑗) 𝑖=0 3 𝑗=0 3 𝑤 𝑑𝑥𝑖 𝑤(𝑑𝑦𝑗) 𝑤(𝑑) = 1 − 2𝑑2 + 𝑑3 4 − 8𝑑 + 5𝑑2 − 𝑑3 0 |𝑑| ≤ 1.0 1.0 ≤ |𝑑| ≤ 2.0 2.0 ≤ |𝑑| 係数 = 1.0
5.
Bicubic法 --- 続き
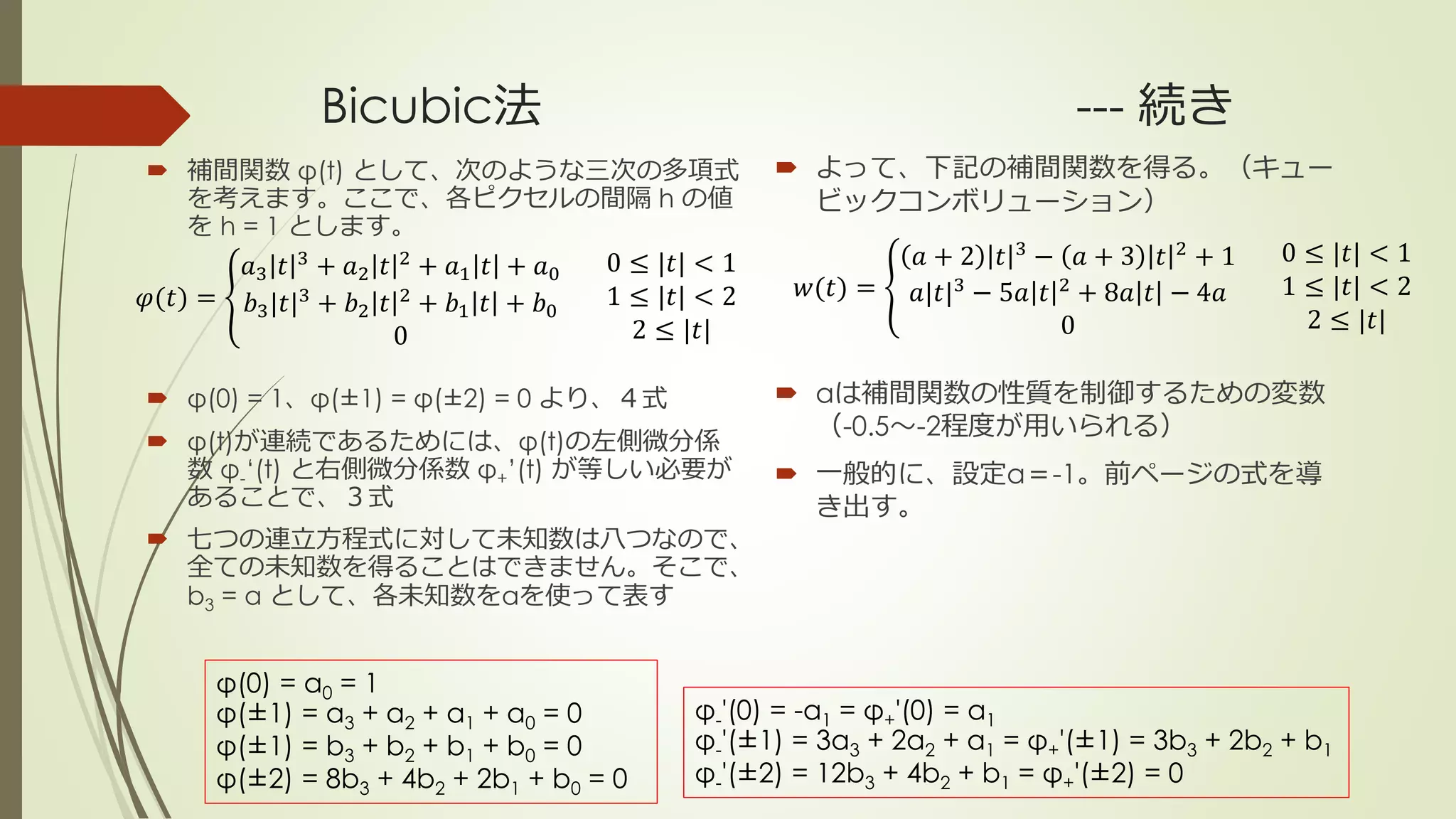
補間関数 φ(t) として、次のような三次の多項式 を考えます。ここで、各ピクセルの間隔 h の値 を h = 1 とします。 φ(0) = 1、φ(±1) = φ(±2) = 0 より、4式 φ(t)が連続であるためには、φ(t)の左側微分係 数 φ-‘(t) と右側微分係数 φ+’(t) が等しい必要が あることで、3式 七つの連立方程式に対して未知数は八つなので、 全ての未知数を得ることはできません。そこで、 b3 = α として、各未知数をαを使って表す 𝑤(𝑡) = 𝑎 + 2 𝑡 3 − 𝑎 + 3 𝑡 2 + 1 𝑎|𝑡|3 − 5𝑎 𝑡 2 + 8𝑎 𝑡 − 4𝑎 0 0 ≤ |𝑡| < 1 1 ≤ |𝑡| < 2 2 ≤ |𝑡| よって、下記の補間関数を得る。(キュー ビックコンボリューション) aは補間関数の性質を制御するための変数 (-0.5~-2程度が用いられる) 一般的に、設定a=-1。前ページの式を導 き出す。 𝜑(𝑡) = 𝑎3 𝑡 3 + 𝑎2 𝑡 2 + 𝑎1 𝑡 + 𝑎0 𝑏3|𝑡|3 + 𝑏2 𝑡 2 + 𝑏1 𝑡 + 𝑏0 0 0 ≤ |𝑡| < 1 1 ≤ |𝑡| < 2 2 ≤ |𝑡| φ(0) = a0 = 1 φ(±1) = a3 + a2 + a1 + a0 = 0 φ(±1) = b3 + b2 + b1 + b0 = 0 φ(±2) = 8b3 + 4b2 + 2b1 + b0 = 0 φ-'(0) = -a1 = φ+'(0) = a1 φ-'(±1) = 3a3 + 2a2 + a1 = φ+'(±1) = 3b3 + 2b2 + b1 φ-'(±2) = 12b3 + 4b2 + b1 = φ+'(±2) = 0
6.
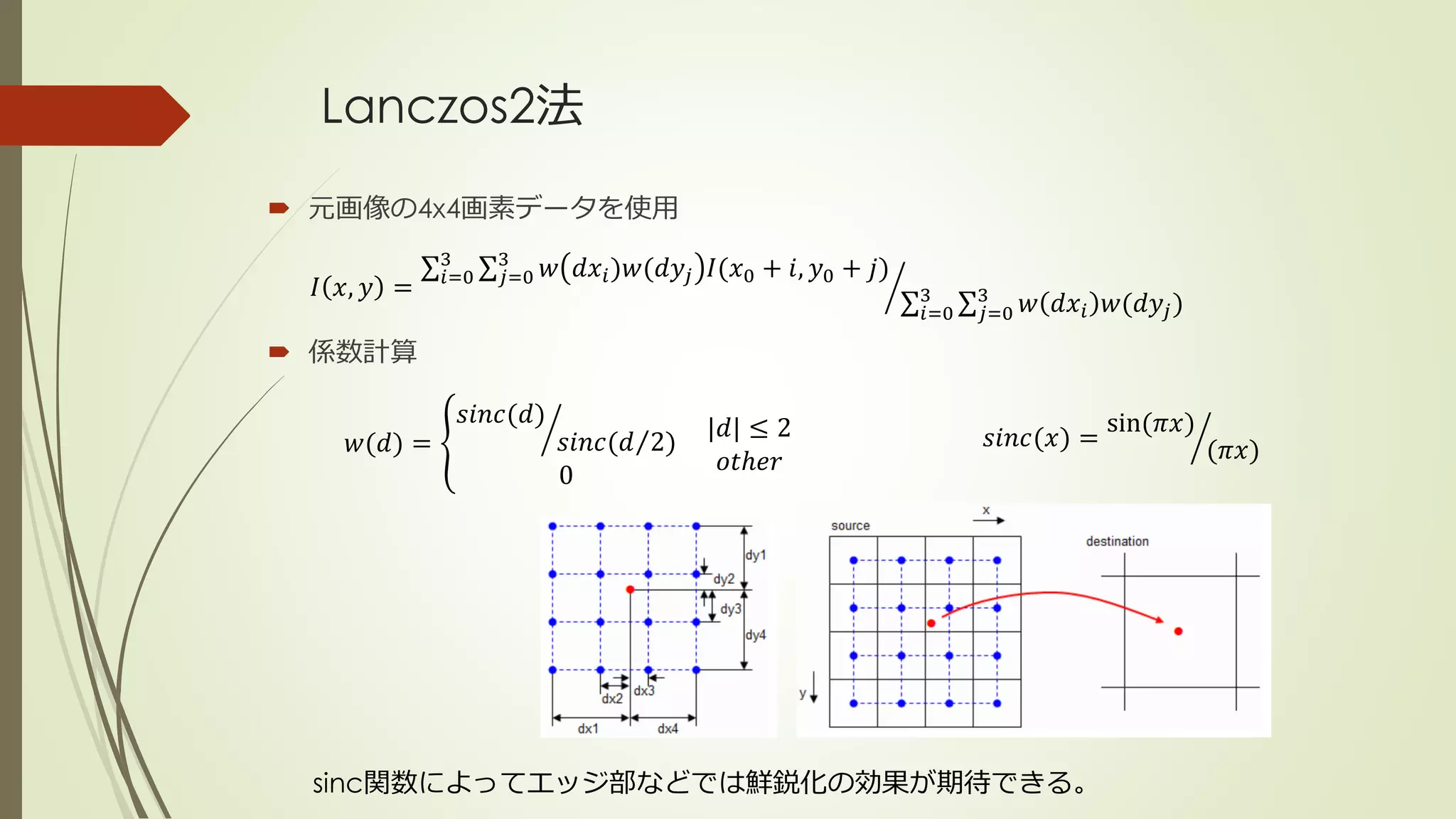
Lanczos2法 元画像の4x4画素データを使用 係数計算 𝐼
𝑥, 𝑦 = 𝑖=0 3 𝑗=0 3 𝑤 𝑑𝑥𝑖)𝑤(𝑑𝑦𝑗 𝐼(𝑥0 + 𝑖, 𝑦0 + 𝑗) 𝑖=0 3 𝑗=0 3 𝑤 𝑑𝑥𝑖 𝑤(𝑑𝑦𝑗) 𝑤(𝑑) = 𝑠𝑖𝑛𝑐(𝑑) 𝑠𝑖𝑛𝑐( 𝑑 2) 0 |𝑑| ≤ 2 𝑜𝑡ℎ𝑒𝑟 𝑠𝑖𝑛𝑐(𝑥) = sin(𝜋𝑥) (𝜋𝑥) sinc関数によってエッジ部などでは鮮鋭化の効果が期待できる。
7.
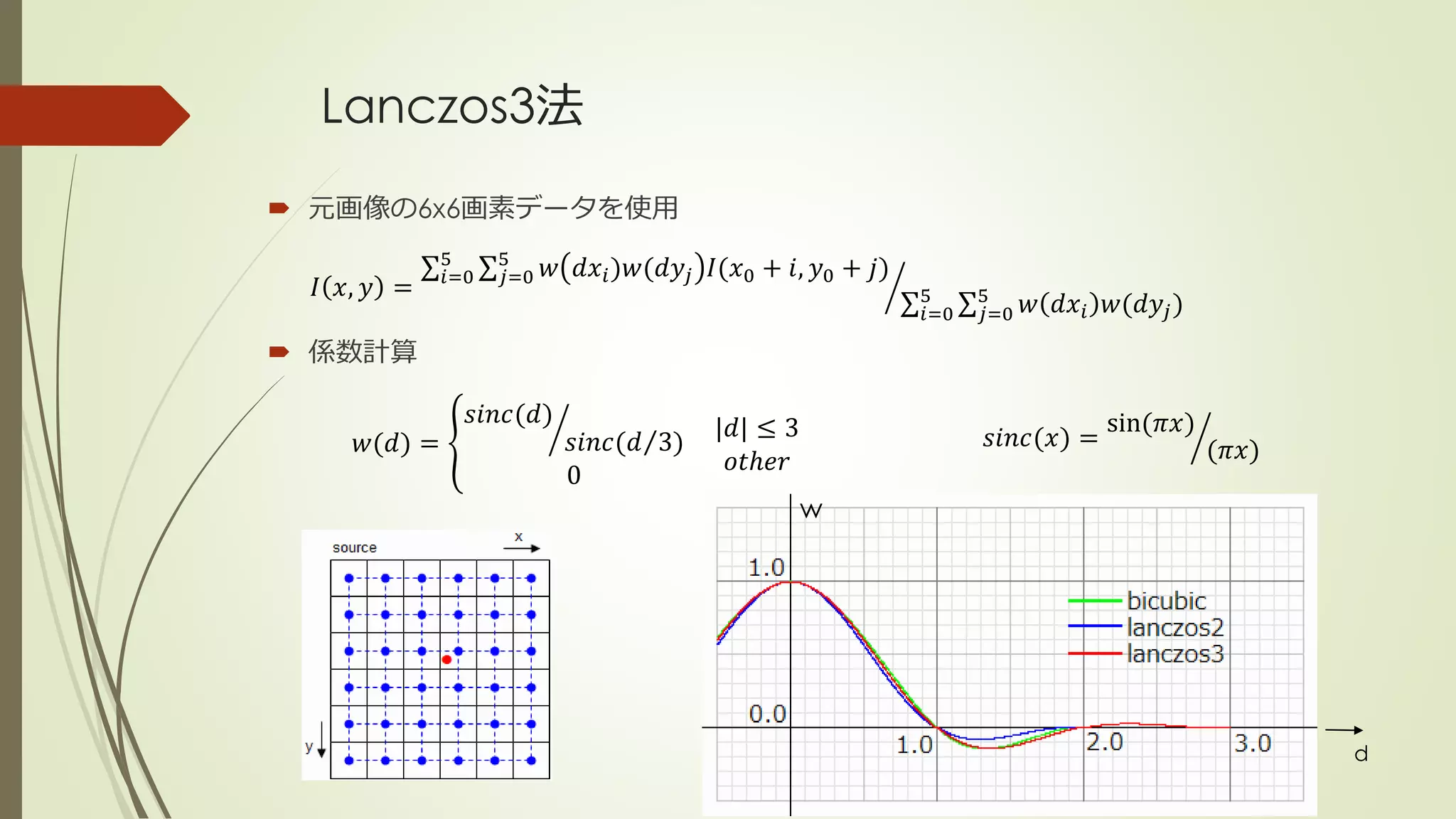
Lanczos3法 元画像の6x6画素データを使用 係数計算 𝐼
𝑥, 𝑦 = 𝑖=0 5 𝑗=0 5 𝑤 𝑑𝑥𝑖)𝑤(𝑑𝑦𝑗 𝐼(𝑥0 + 𝑖, 𝑦0 + 𝑗) 𝑖=0 5 𝑗=0 5 𝑤 𝑑𝑥𝑖 𝑤(𝑑𝑦𝑗) 𝑤(𝑑) = 𝑠𝑖𝑛𝑐(𝑑) 𝑠𝑖𝑛𝑐( 𝑑 3) 0 |𝑑| ≤ 3 𝑜𝑡ℎ𝑒𝑟 𝑠𝑖𝑛𝑐(𝑥) = sin(𝜋𝑥) (𝜋𝑥) d w
8.
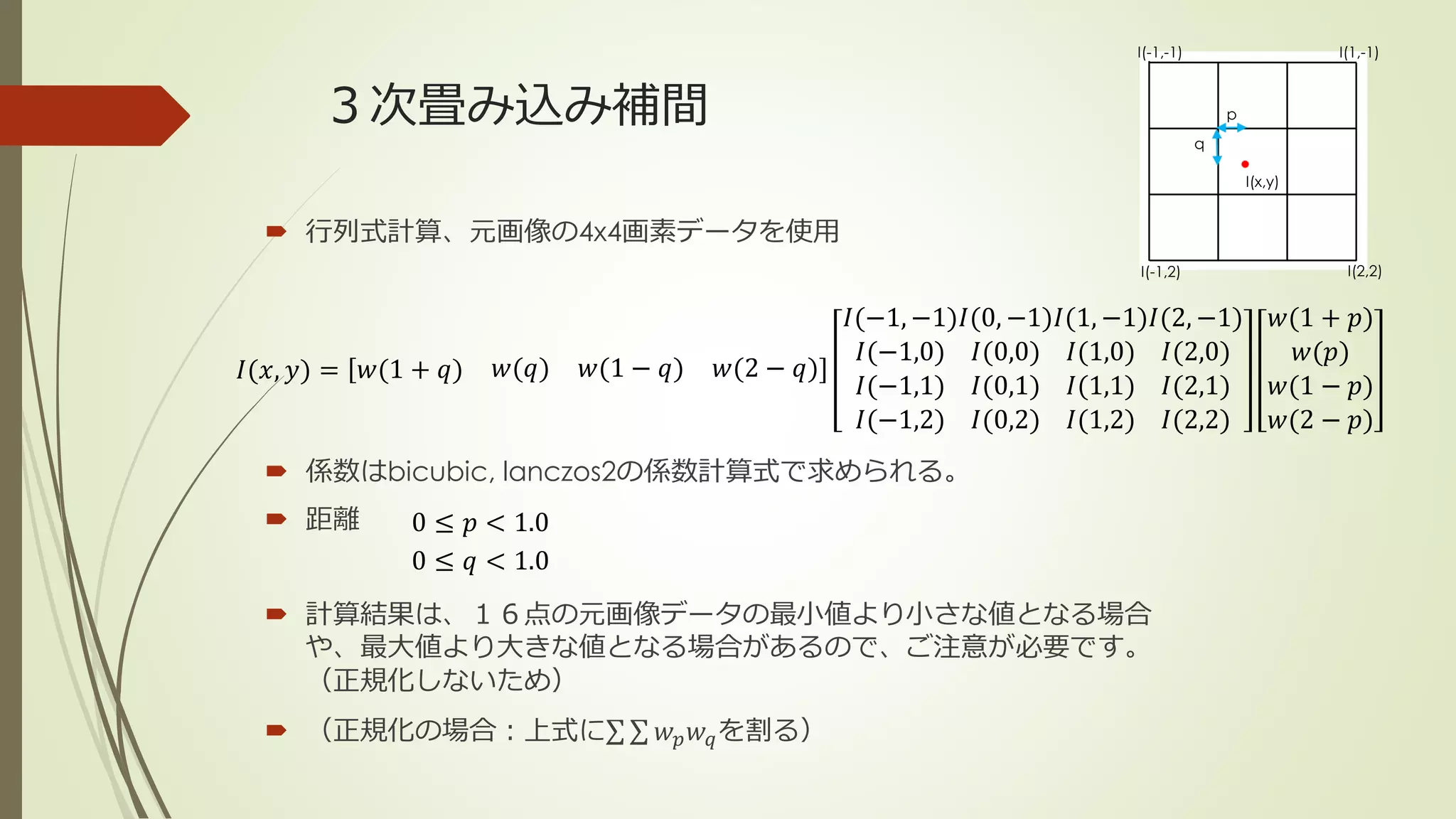
3次畳み込み補間 行列式計算、元画像の4x4画素データを使用 係数はbicubic,
lanczos2の係数計算式で求められる。 距離 計算結果は、16点の元画像データの最小値より小さな値となる場合 や、最大値より大きな値となる場合があるので、ご注意が必要です。 (正規化しないため) (正規化の場合:上式に 𝑤 𝑝 𝑤 𝑞を割る) 𝐼(𝑥, 𝑦) = 𝑤(1 + 𝑞) 𝑤(𝑞) 𝑤(1 − 𝑞) 𝑤(2 − 𝑞) 𝐼(−1, −1) 𝐼(−1,0) 𝐼(−1,1) 𝐼(−1,2) 𝐼(0, −1) 𝐼(0,0) 𝐼(0,1) 𝐼(0,2) 𝐼(1, −1) 𝐼(1,0) 𝐼(1,1) 𝐼(1,2) 𝐼(2, −1) 𝐼(2,0) 𝐼(2,1) 𝐼(2,2) 𝑤(1 + 𝑝) 𝑤(𝑝) 𝑤(1 − 𝑝) 𝑤(2 − 𝑝) I(-1,-1) I(2,2) q p I(-1,2) I(1,-1) I(x,y) 0 ≤ 𝑝 < 1.0 0 ≤ 𝑞 < 1.0
9.
City block距離 vs.直線距離
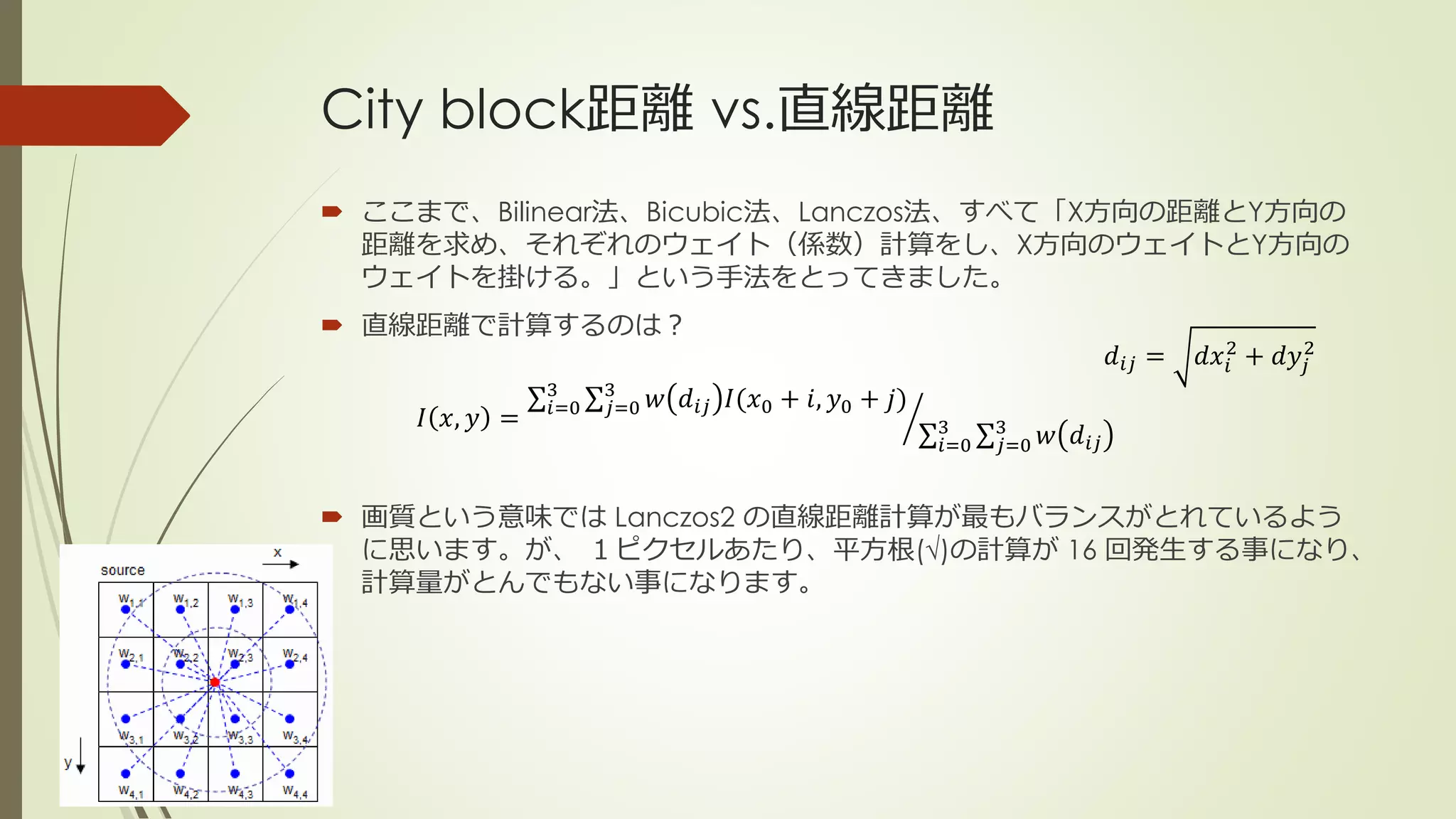
ここまで、Bilinear法、Bicubic法、Lanczos法、すべて「X方向の距離とY方向の 距離を求め、それぞれのウェイト(係数)計算をし、X方向のウェイトとY方向の ウェイトを掛ける。」という手法をとってきました。 直線距離で計算するのは? 画質という意味では Lanczos2 の直線距離計算が最もバランスがとれているよう に思います。が、 1ピクセルあたり、平方根(√)の計算が 16 回発生する事になり、 計算量がとんでもない事になります。 𝐼 𝑥, 𝑦 = 𝑖=0 3 𝑗=0 3 𝑤 𝑑𝑖𝑗 𝐼(𝑥0 + 𝑖, 𝑦0 + 𝑗) 𝑖=0 3 𝑗=0 3 𝑤 𝑑𝑖𝑗 𝑑𝑖𝑗 = 𝑑𝑥𝑖 2 + 𝑑𝑦𝑗 2
10.
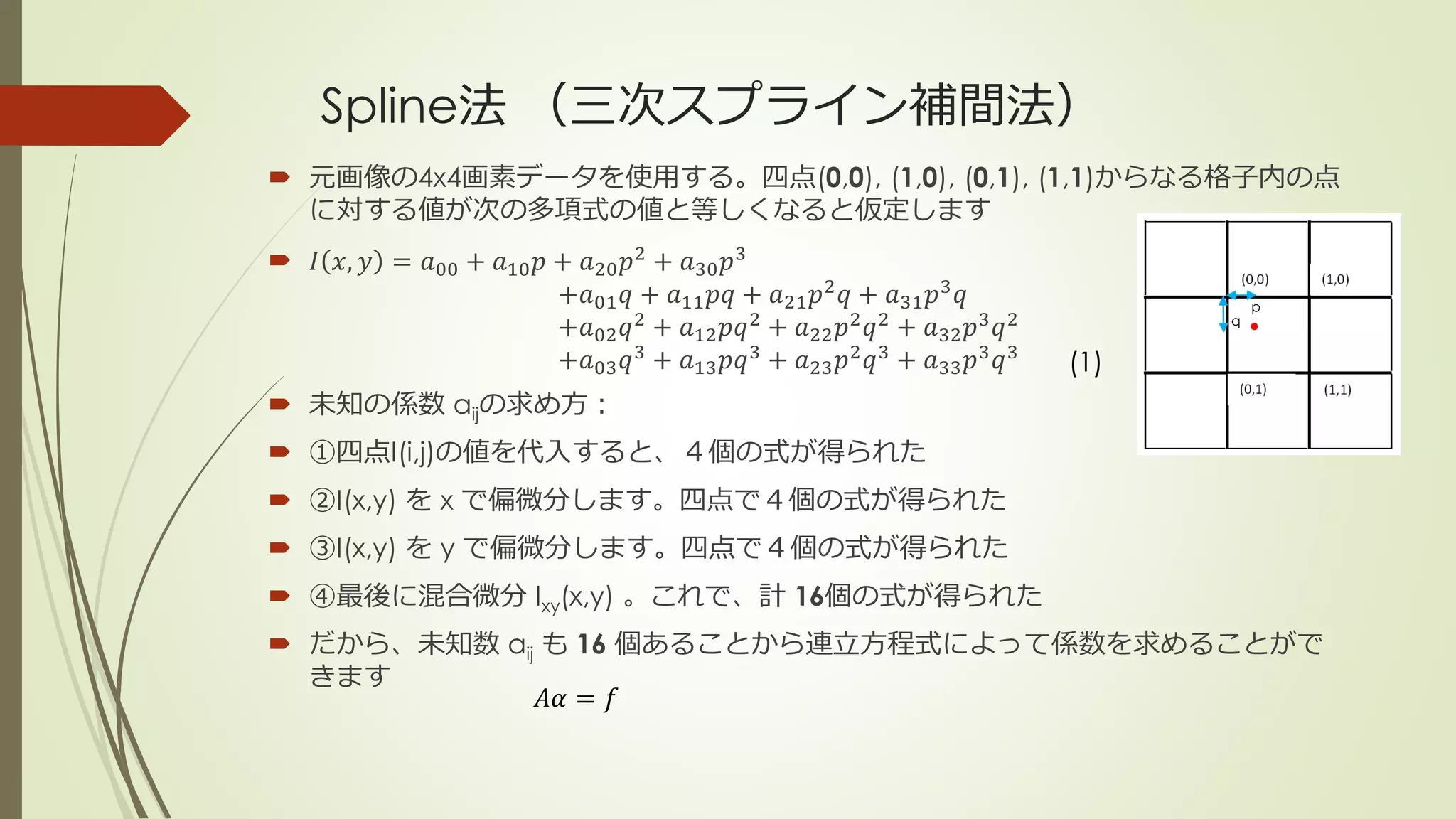
Spline法 (三次スプライン補間法) 元画像の4x4画素データを使用する。四点(0,0),
(1,0), (0,1), (1,1)からなる格子内の点 に対する値が次の多項式の値と等しくなると仮定します 𝐼 𝑥, 𝑦 = 𝑎00 + 𝑎10 𝑝 + 𝑎20 𝑝2 + 𝑎30 𝑝3 +𝑎01 𝑞 + 𝑎11 𝑝𝑞 + 𝑎21 𝑝2 𝑞 + 𝑎31 𝑝3 𝑞 +𝑎02 𝑞2 + 𝑎12 𝑝𝑞2 + 𝑎22 𝑝2 𝑞2 + 𝑎32 𝑝3 𝑞2 +𝑎03 𝑞3 + 𝑎13 𝑝𝑞3 + 𝑎23 𝑝2 𝑞3 + 𝑎33 𝑝3 𝑞3 未知の係数 aijの求め方: ①四点I(i,j)の値を代入すると、4個の式が得られた ②I(x,y) を x で偏微分します。四点で4個の式が得られた ③I(x,y) を y で偏微分します。四点で4個の式が得られた ④最後に混合微分 Ixy(x,y) 。これで、計 16個の式が得られた だから、未知数 aij も 16 個あることから連立方程式によって係数を求めることがで きます p q (1) 𝐴𝛼 = 𝑓
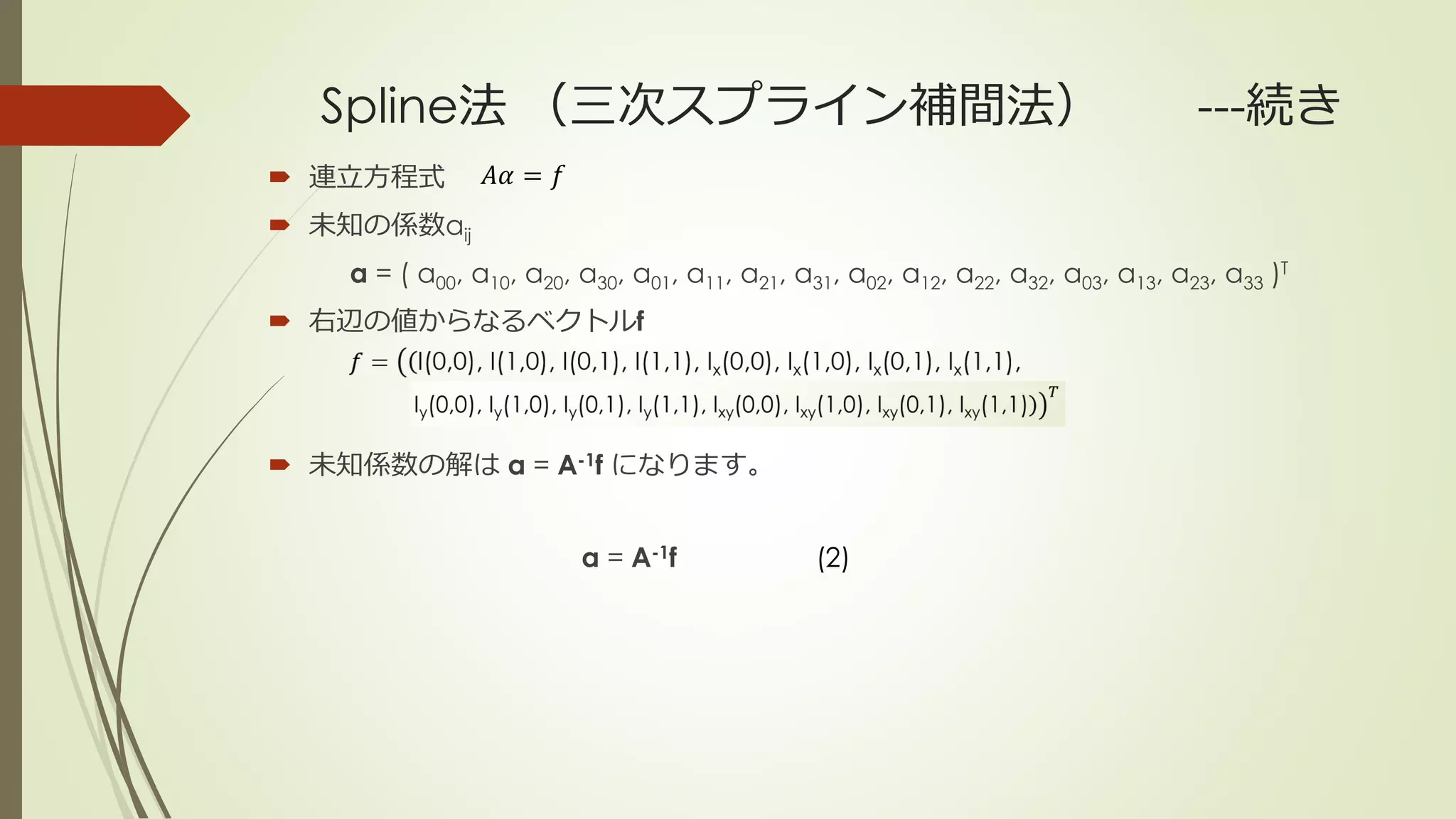
11.
Spline法 (三次スプライン補間法) ---続き
連立方程式 未知の係数aij α = ( a00, a10, a20, a30, a01, a11, a21, a31, a02, a12, a22, a32, a03, a13, a23, a33 )T 右辺の値からなるベクトルf 未知係数の解は α = A-1f になります。 𝐴𝛼 = 𝑓 α = A-1f (2)
12.
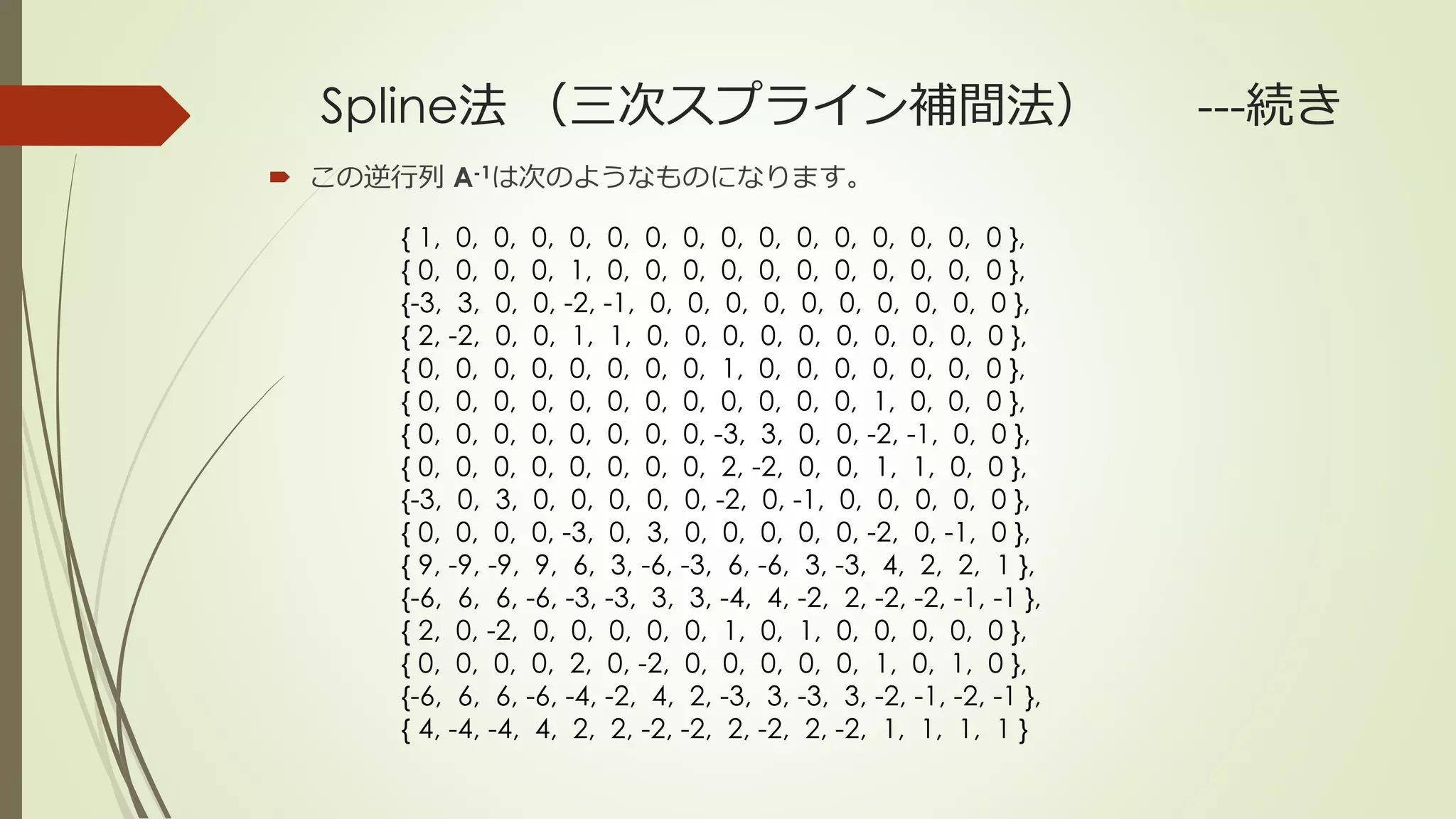
Spline法 (三次スプライン補間法) ---続き
この逆行列 A-1は次のようなものになります。 { 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 }, { 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 }, {-3, 3, 0, 0, -2, -1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 }, { 2, -2, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 }, { 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0 }, { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0 }, { 0, 0, 0, 0, 0, 0, 0, 0, -3, 3, 0, 0, -2, -1, 0, 0 }, { 0, 0, 0, 0, 0, 0, 0, 0, 2, -2, 0, 0, 1, 1, 0, 0 }, {-3, 0, 3, 0, 0, 0, 0, 0, -2, 0, -1, 0, 0, 0, 0, 0 }, { 0, 0, 0, 0, -3, 0, 3, 0, 0, 0, 0, 0, -2, 0, -1, 0 }, { 9, -9, -9, 9, 6, 3, -6, -3, 6, -6, 3, -3, 4, 2, 2, 1 }, {-6, 6, 6, -6, -3, -3, 3, 3, -4, 4, -2, 2, -2, -2, -1, -1 }, { 2, 0, -2, 0, 0, 0, 0, 0, 1, 0, 1, 0, 0, 0, 0, 0 }, { 0, 0, 0, 0, 2, 0, -2, 0, 0, 0, 0, 0, 1, 0, 1, 0 }, {-6, 6, 6, -6, -4, -2, 4, 2, -3, 3, -3, 3, -2, -1, -2, -1 }, { 4, -4, -4, 4, 2, 2, -2, -2, 2, -2, 2, -2, 1, 1, 1, 1 }
13.
Spline法 (三次スプライン補間法) ---続き
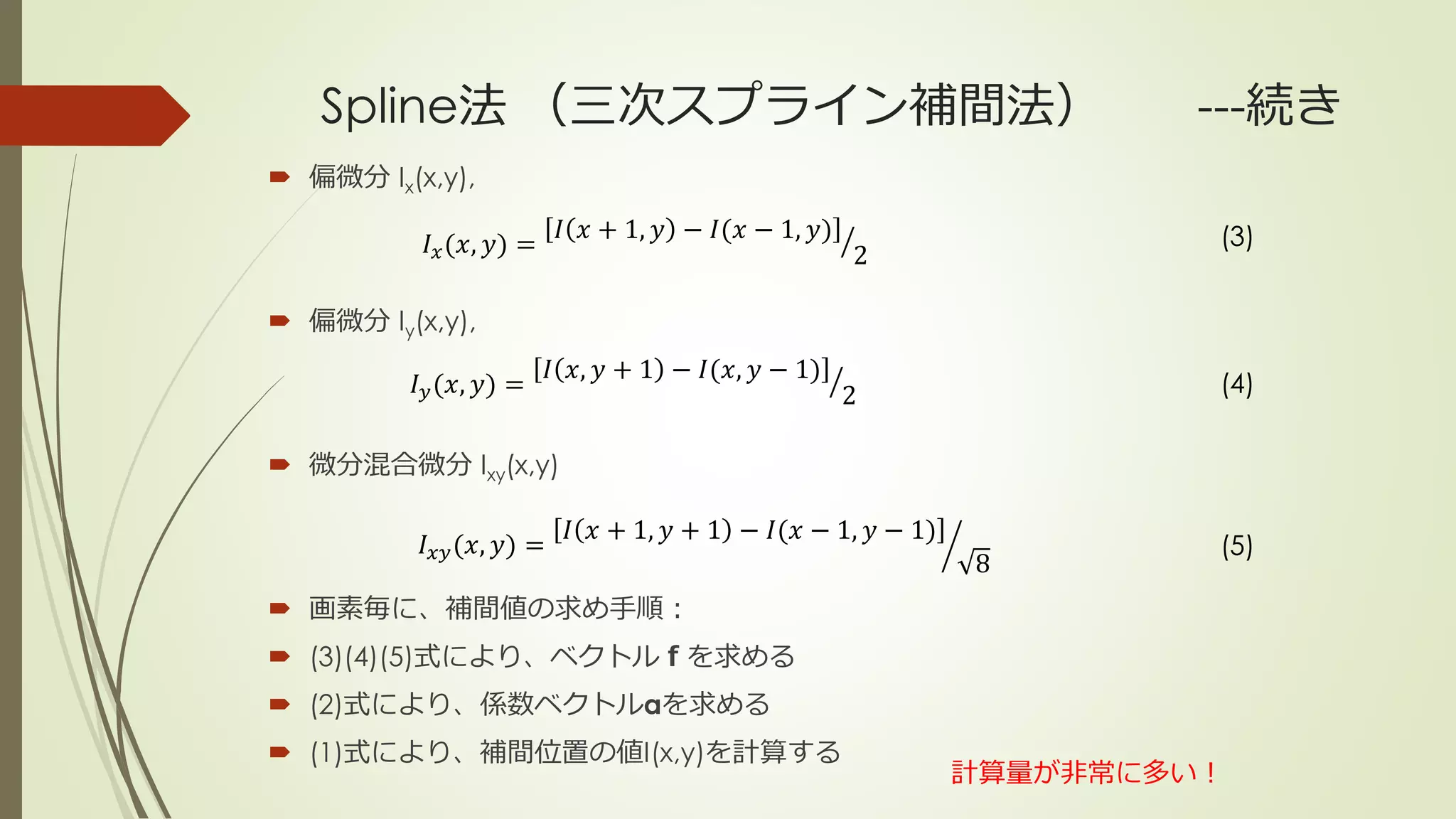
偏微分 Ix(x,y), 偏微分 Iy(x,y), 微分混合微分 Ixy(x,y) 画素毎に、補間値の求め手順: (3)(4)(5)式により、ベクトルfを求める (2)式により、係数ベクトルαを求める (1)式により、補間位置の値I(x,y)を計算する 𝐼 𝑥(𝑥, 𝑦) = 𝐼 𝑥 + 1, 𝑦 − 𝐼(𝑥 − 1, 𝑦) 2 𝐼 𝑦(𝑥, 𝑦) = 𝐼 𝑥, 𝑦 + 1 − 𝐼(𝑥, 𝑦 − 1) 2 𝐼 𝑥𝑦(𝑥, 𝑦) = 𝐼 𝑥 + 1, 𝑦 + 1 − 𝐼(𝑥 − 1, 𝑦 − 1) 8 (3) (4) (5) 計算量が非常に多い!
14.
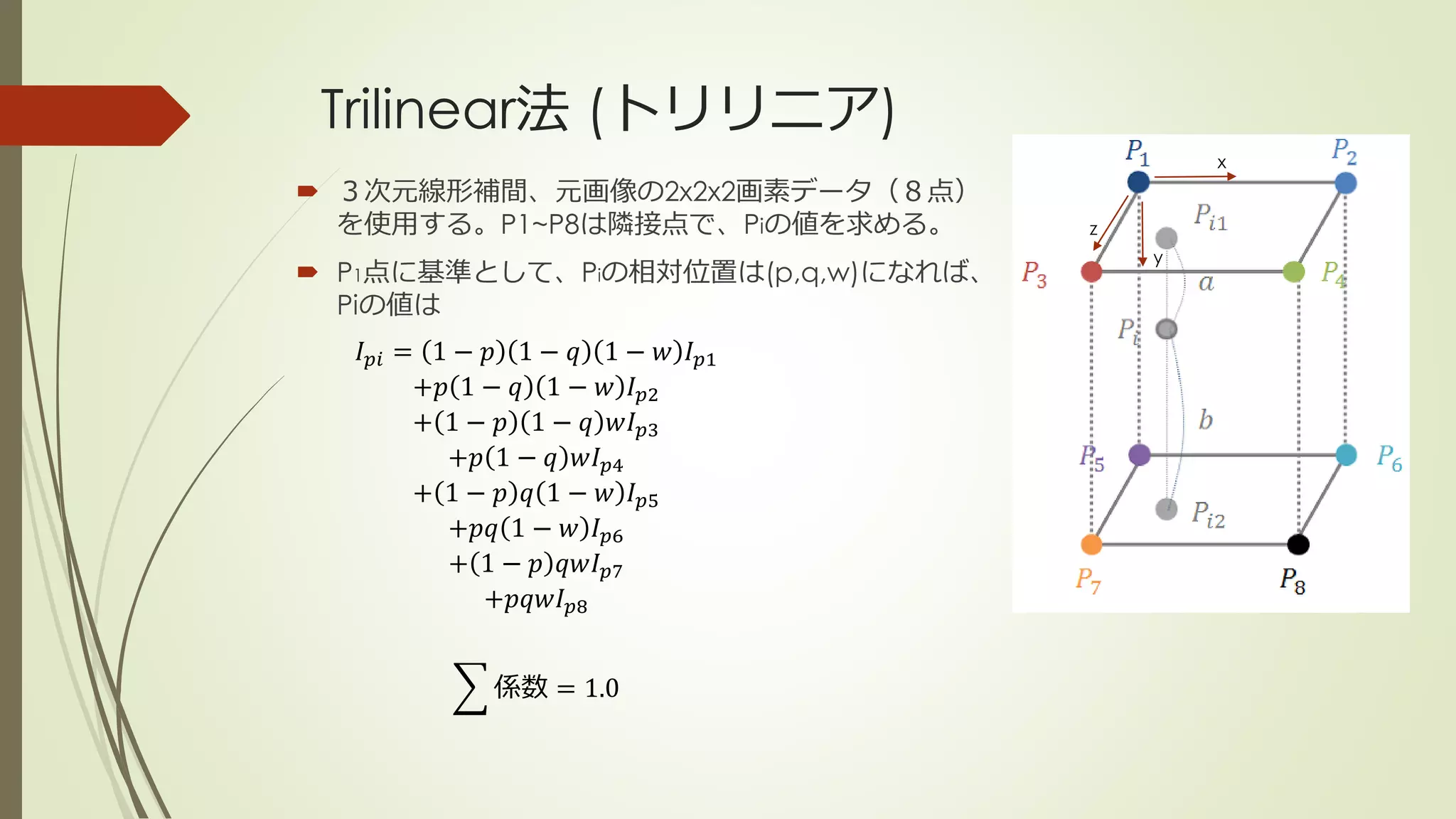
Trilinear法 (トリリニア) 係数 =
1.0 3次元線形補間、元画像の2x2x2画素データ(8点) を使用する。P1~P8は隣接点で、Piの値を求める。 P1点に基準として、Piの相対位置は(p,q,w)になれば、 Piの値は x y z 𝐼 𝑝𝑖 = 1 − 𝑝 1 − 𝑞 1 − 𝑤 𝐼 𝑝1 +𝑝 1 − 𝑞 1 − 𝑤 𝐼 𝑝2 + 1 − 𝑝 1 − 𝑞 𝑤𝐼 𝑝3 +𝑝 1 − 𝑞 𝑤𝐼 𝑝4 + 1 − 𝑝 𝑞 1 − 𝑤 𝐼 𝑝5 +𝑝𝑞 1 − 𝑤 𝐼 𝑝6 + 1 − 𝑝 𝑞𝑤𝐼 𝑝7 +𝑝𝑞𝑤𝐼 𝑝8
Download










![[DL輪読会]EdgeConnect: Generative Image Inpainting with Adversarial Edge Learning](https://cdn.slidesharecdn.com/ss_thumbnails/slidev2reduced-190422065109-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Revisiting Deep Learning Models for Tabular Data (NeurIPS 2021) 表形式デー...](https://cdn.slidesharecdn.com/ss_thumbnails/dl20220318dlfin-220322065433-thumbnail.jpg?width=640&height=640&fit=bounds)