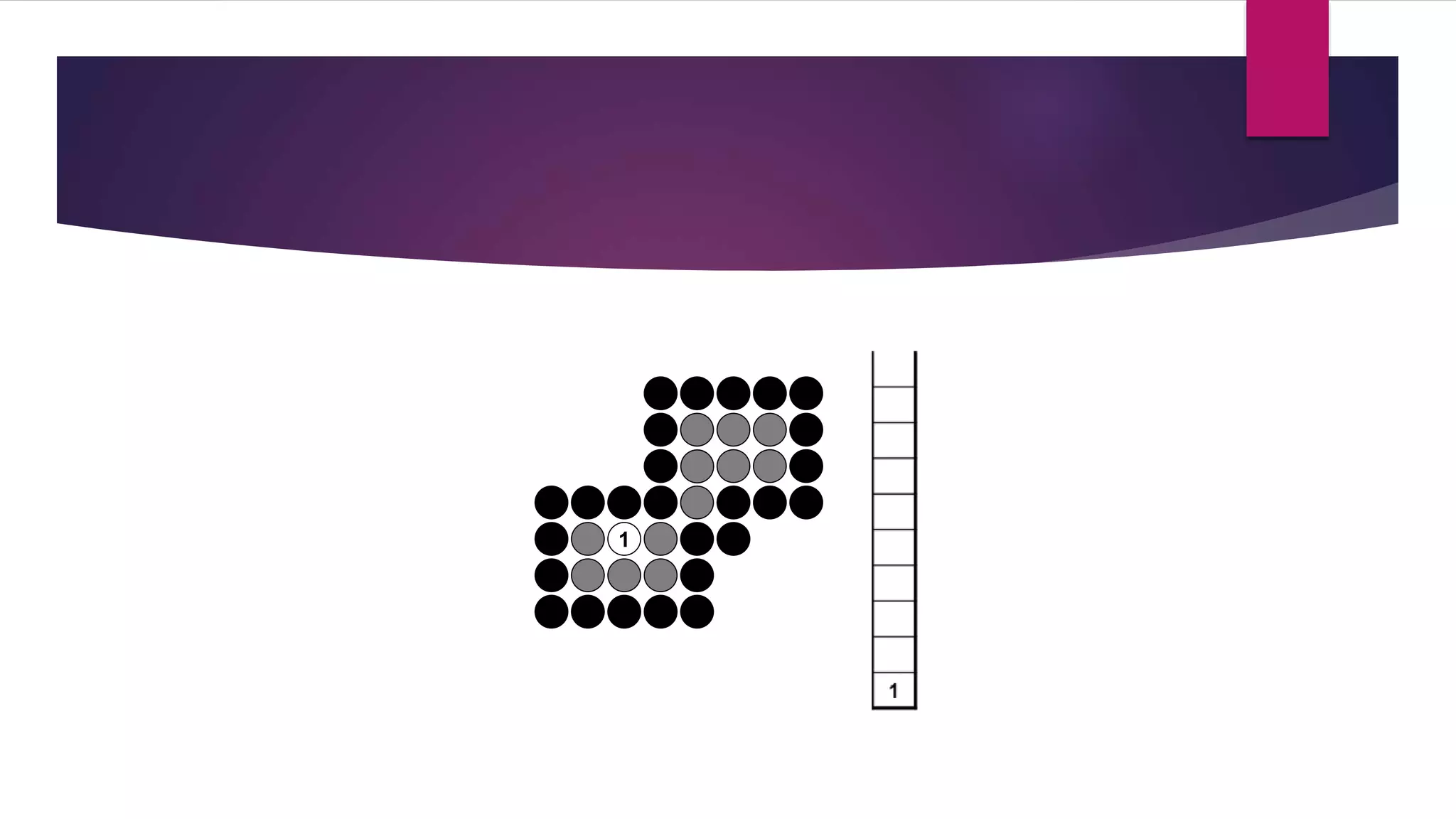
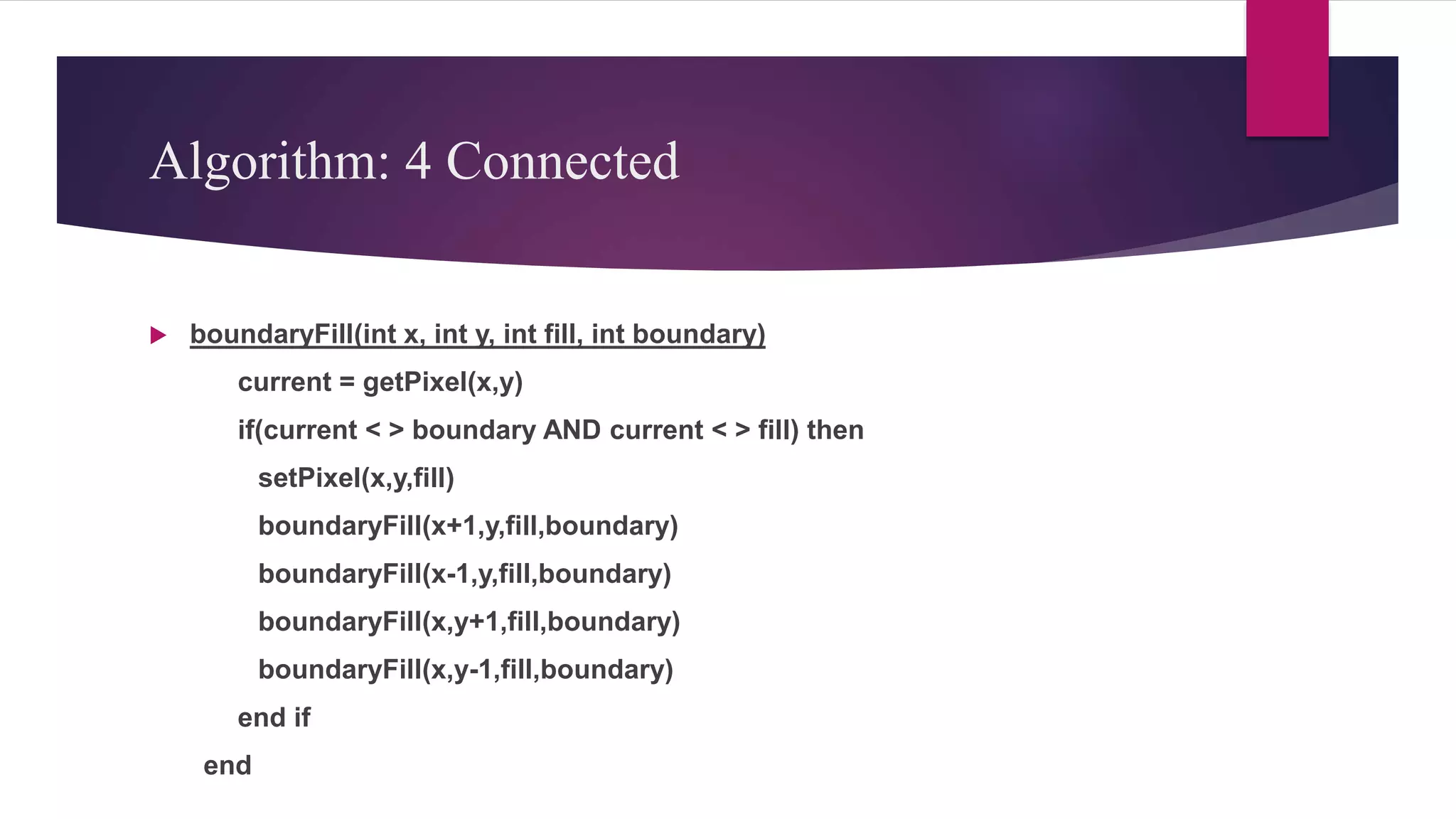
The document discusses different techniques for filling polygons, including boundary fill, flood fill, and scan-line fill methods. It explains that boundary fill and flood fill work by recursively filling neighboring pixels of the same color until reaching the polygon boundary. Scan-line fill works by drawing pixels between edge intersections on each scan line from top to bottom of the polygon. Special cases like handling vertices and updating edge positions are important to the scan-line fill algorithm.