This document provides an overview of Voronoi diagrams, including:
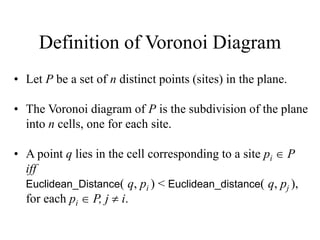
- Defining Voronoi diagrams as subdividing a plane into regions based on distance to input sites
- Demonstrating Voronoi diagrams for 1, 2, and more sites
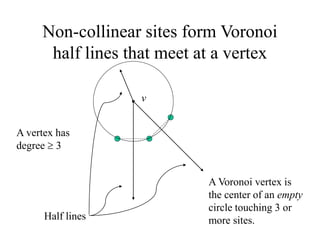
- Explaining properties like cells, edges, and vertices
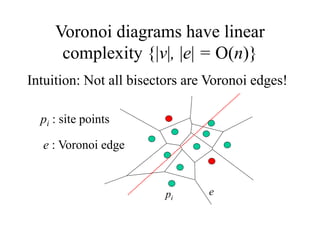
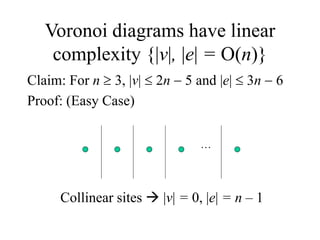
- Analyzing the complexity and proving Voronoi diagrams have linear size
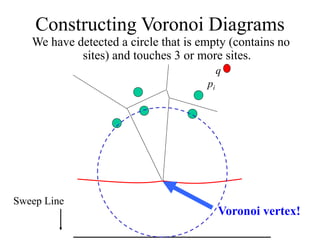
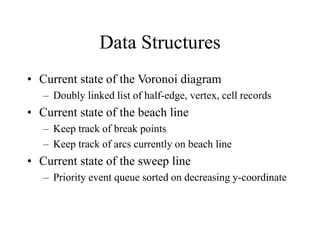
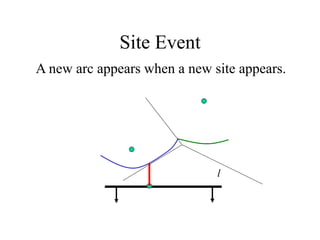
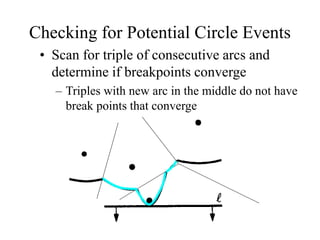
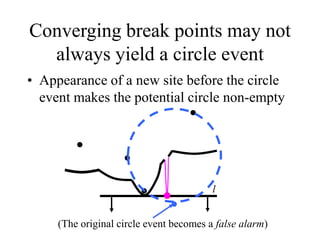
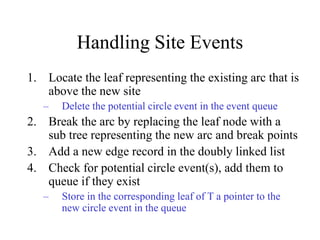
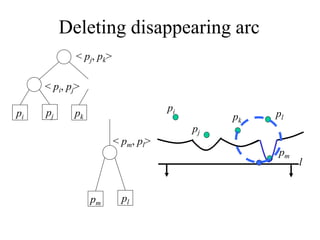
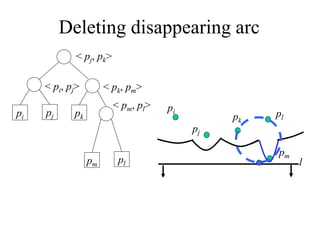
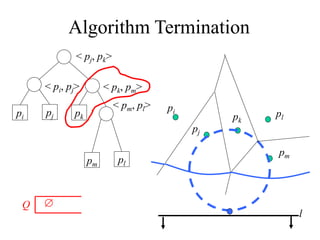
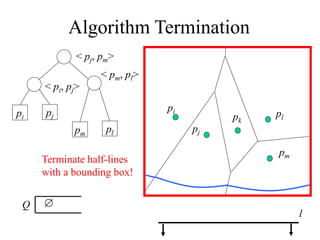
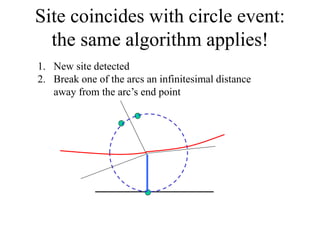
- Outlining Fortune's sweep line algorithm for constructing Voronoi diagrams in linear time using data structures like a balanced binary search tree and doubly linked list





































































































![[English Version]Maker-Ray Product Brochure V3 .pdf](https://cdn.slidesharecdn.com/ss_thumbnails/englishversionmaker-rayproductbrochurev3-260113094444-0156dbdc-thumbnail.jpg?width=640&height=640&fit=bounds)
![DESIGN AND FABRICATION OF THE IBM 90-90 SEAT BELT CLAMP KIA VEHICLE[1].pptx 2...](https://cdn.slidesharecdn.com/ss_thumbnails/designandfabricationoftheibm90-90seatbeltclampkiavehicle1-260116160442-70ff67fc-thumbnail.jpg?width=640&height=640&fit=bounds)



