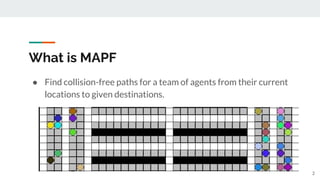
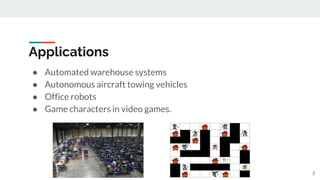
Multi-Agent Path Finding (MAPF) is the problem of finding collision-free paths for multiple agents from their starting locations to given goal destinations. It has applications in automated warehouse systems, autonomous aircraft towing vehicles, office robots, and video game characters. The problem is formulated by representing the area as a grid of cells, with obstacles blocking certain cells. The objective is to find paths for N agents that minimize the sum of costs or makespan. Key assumptions include discrete time steps and agents occupying the same cell at the same time resulting in collisions. Different algorithms that have been developed to solve MAPF include search-based approaches like A* and rule-based approaches like push-and-swap.



















![Sensor Fusion Study - Ch11. The H-Infinity Filter [김영범]](https://cdn.slidesharecdn.com/ss_thumbnails/11h-inf-200815075146-thumbnail.jpg?width=640&height=640&fit=bounds)