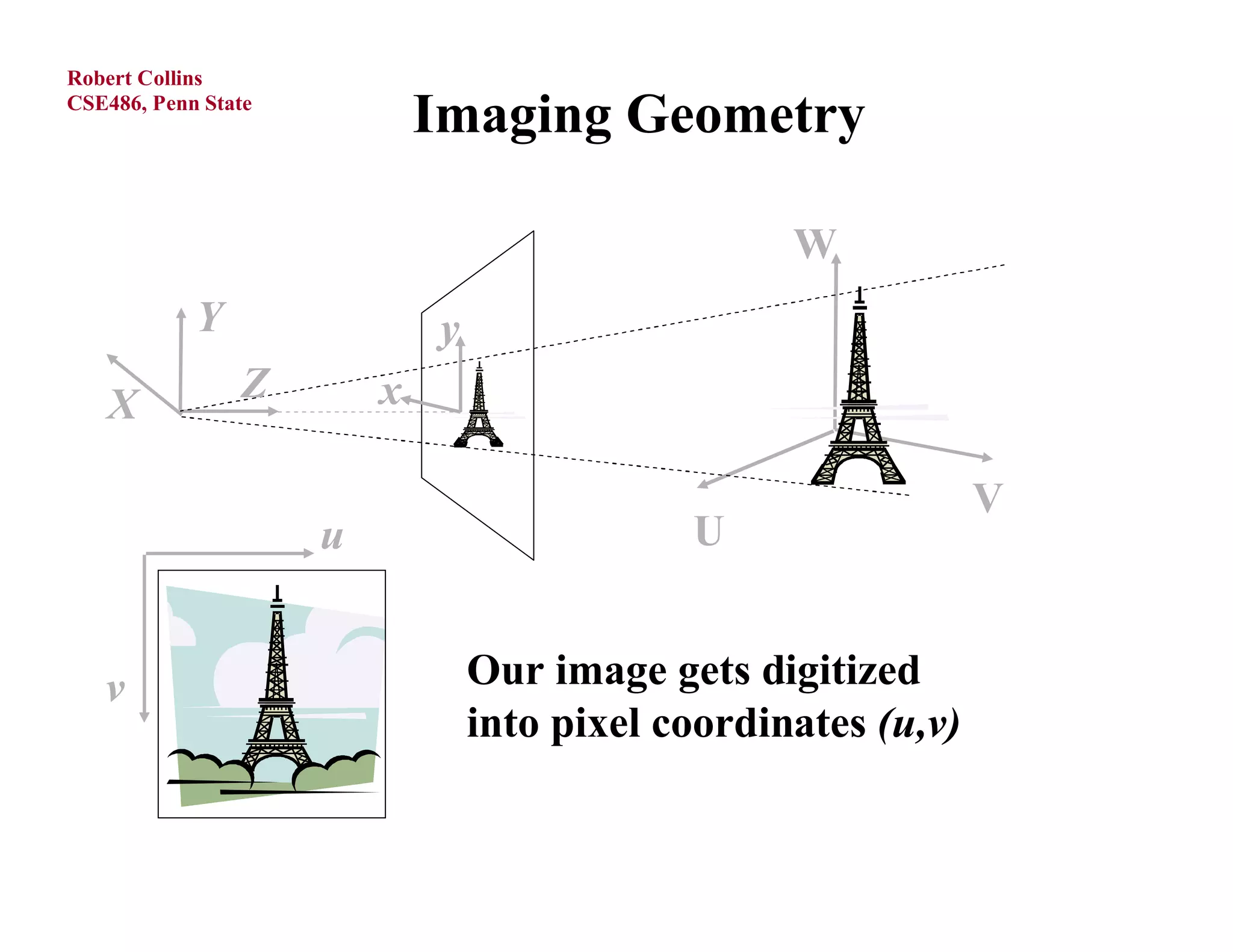
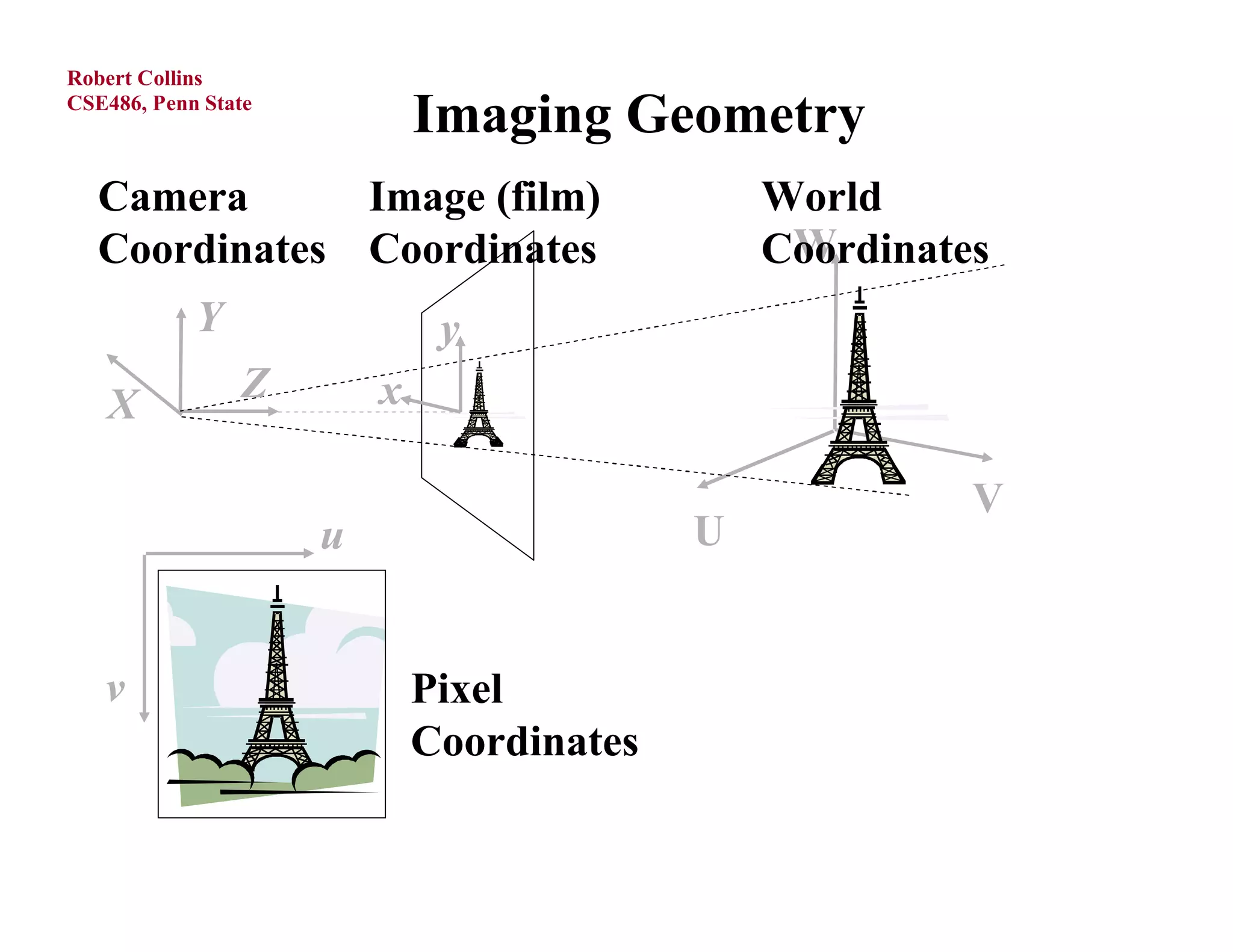
The document discusses camera projection and imaging geometry. It introduces:
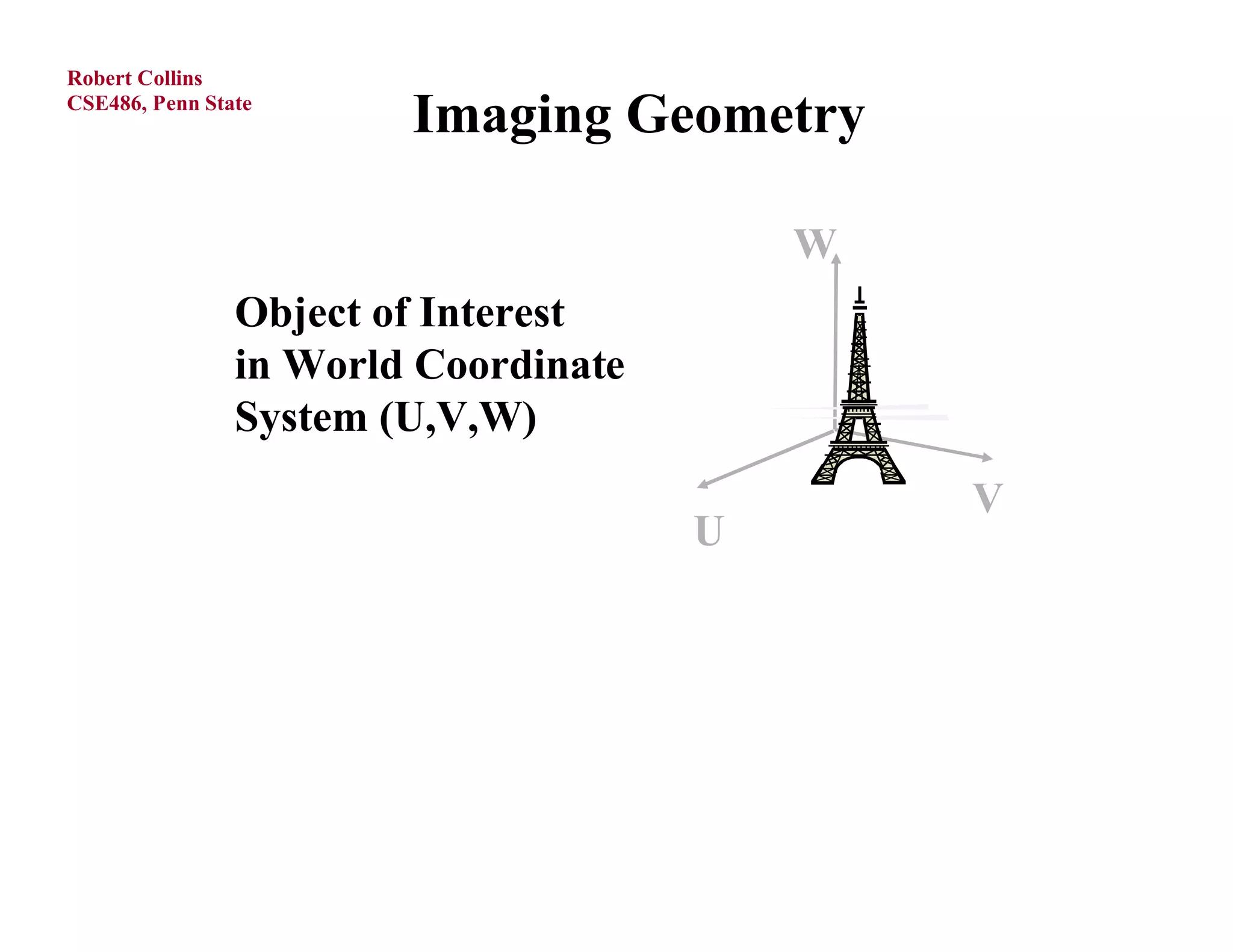
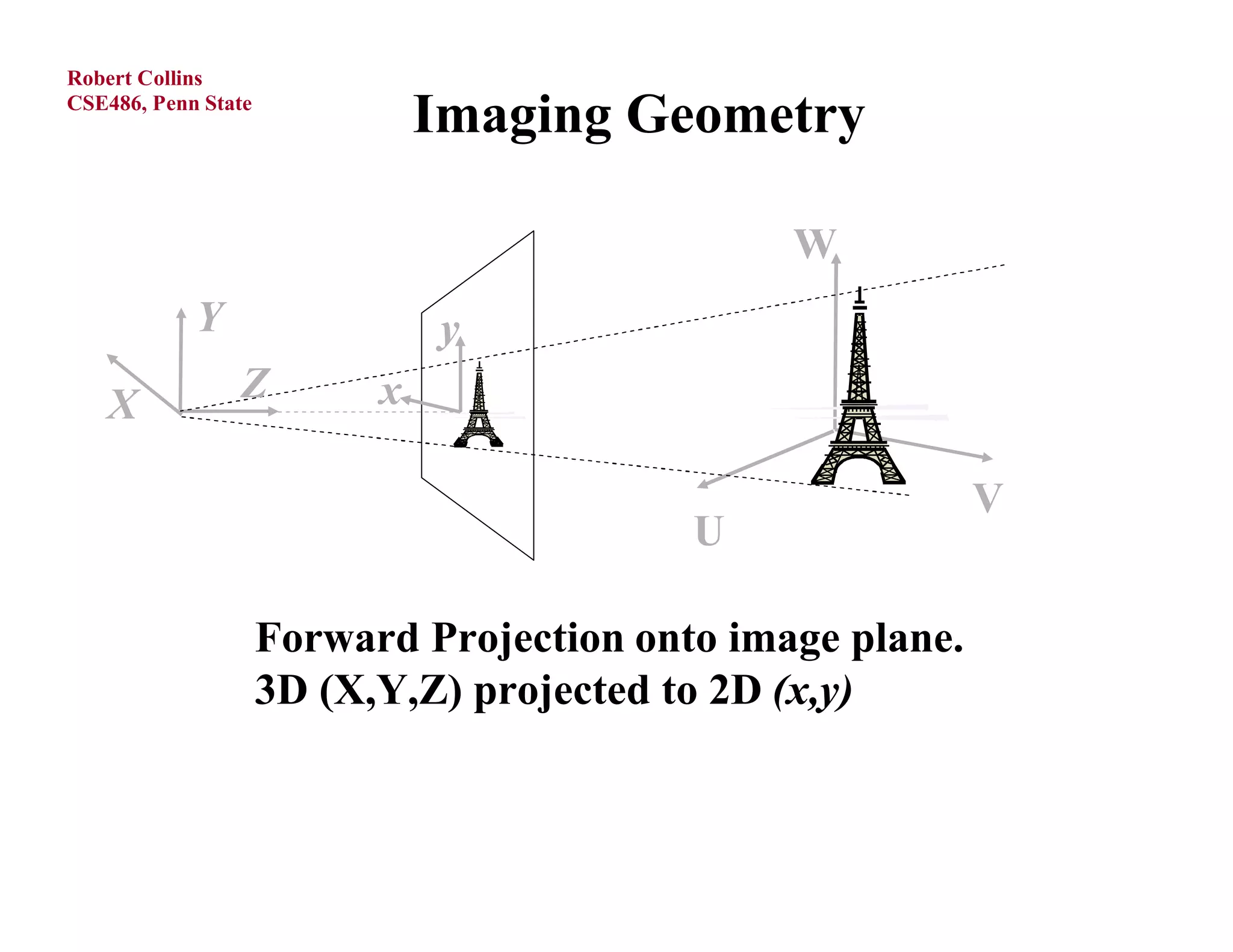
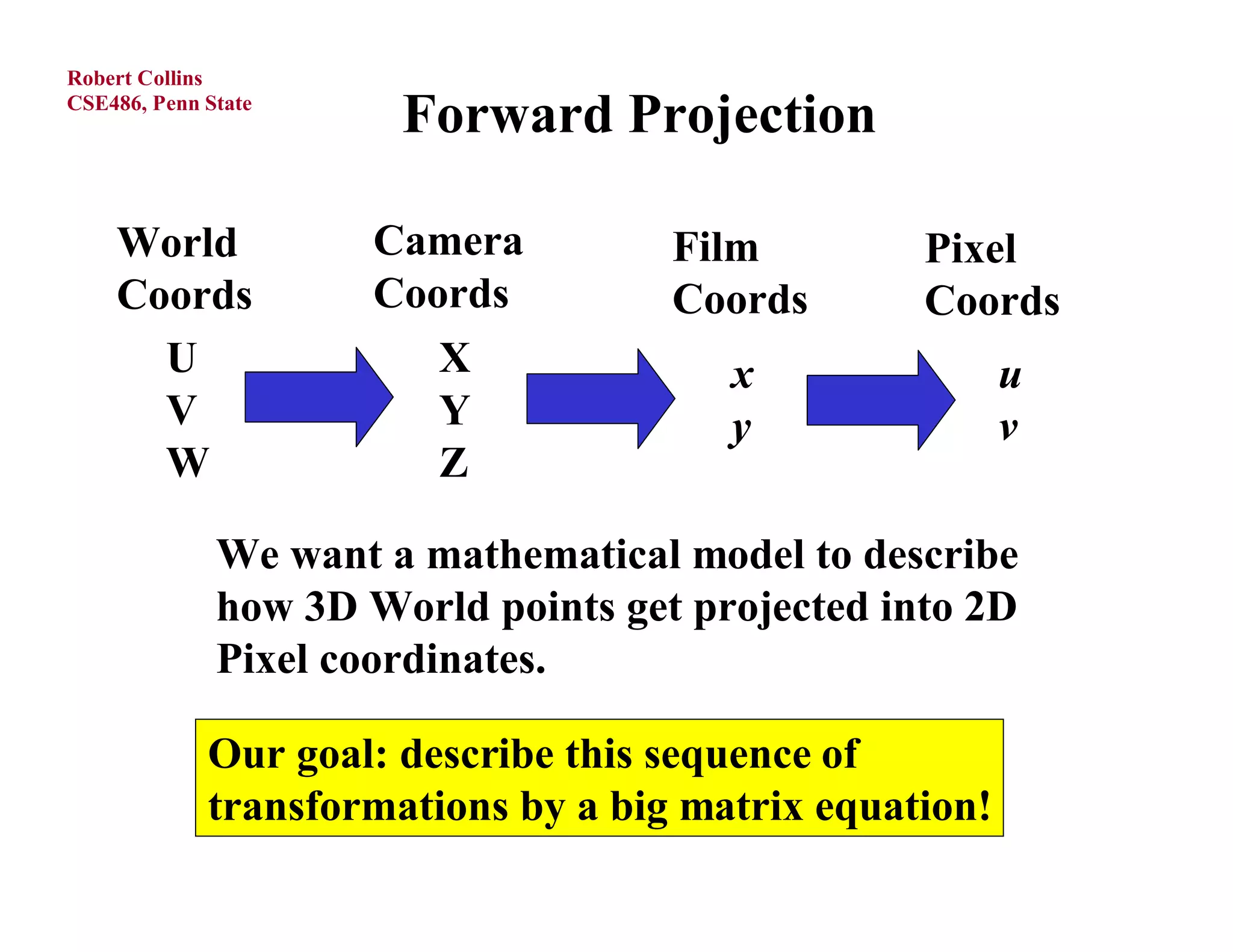
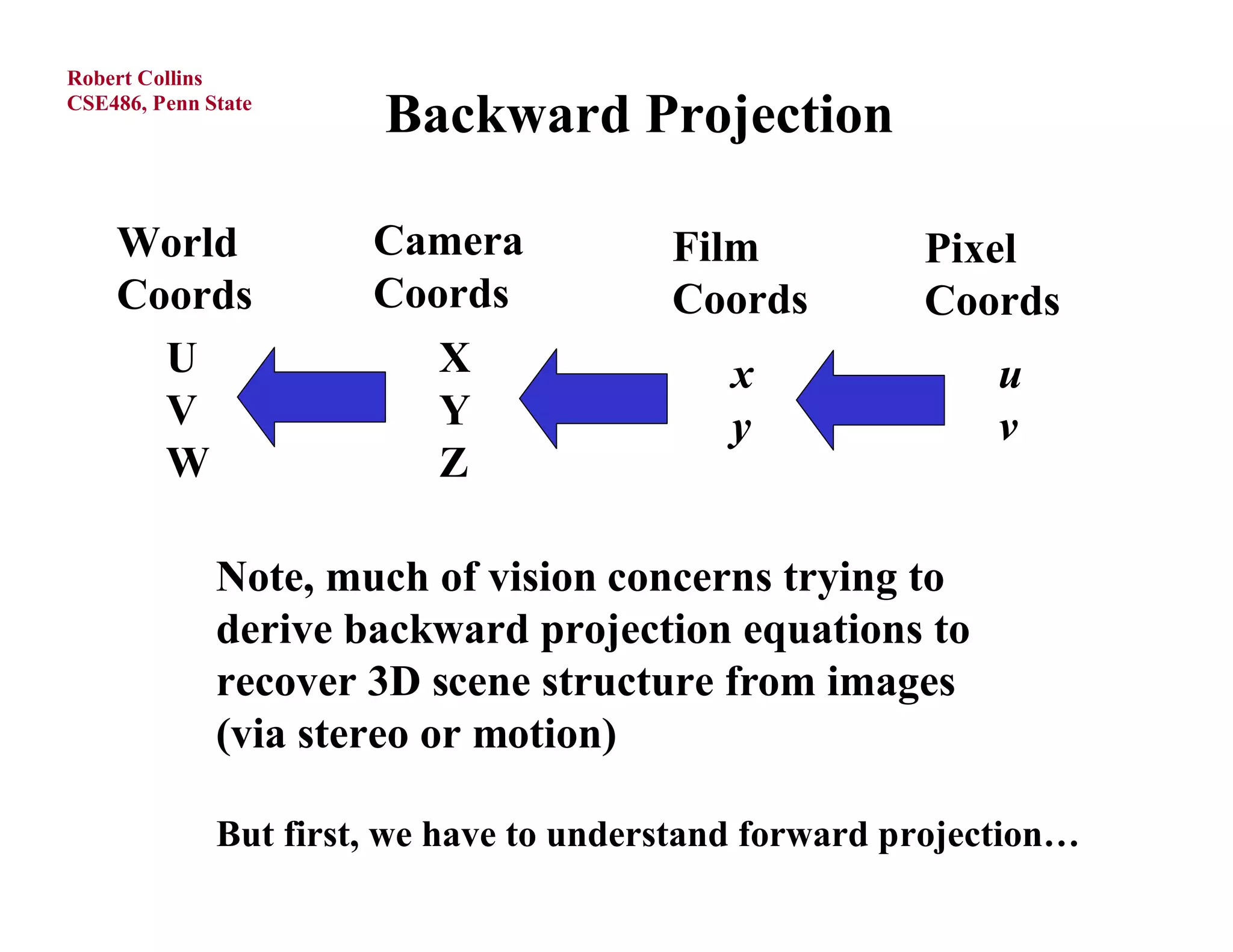
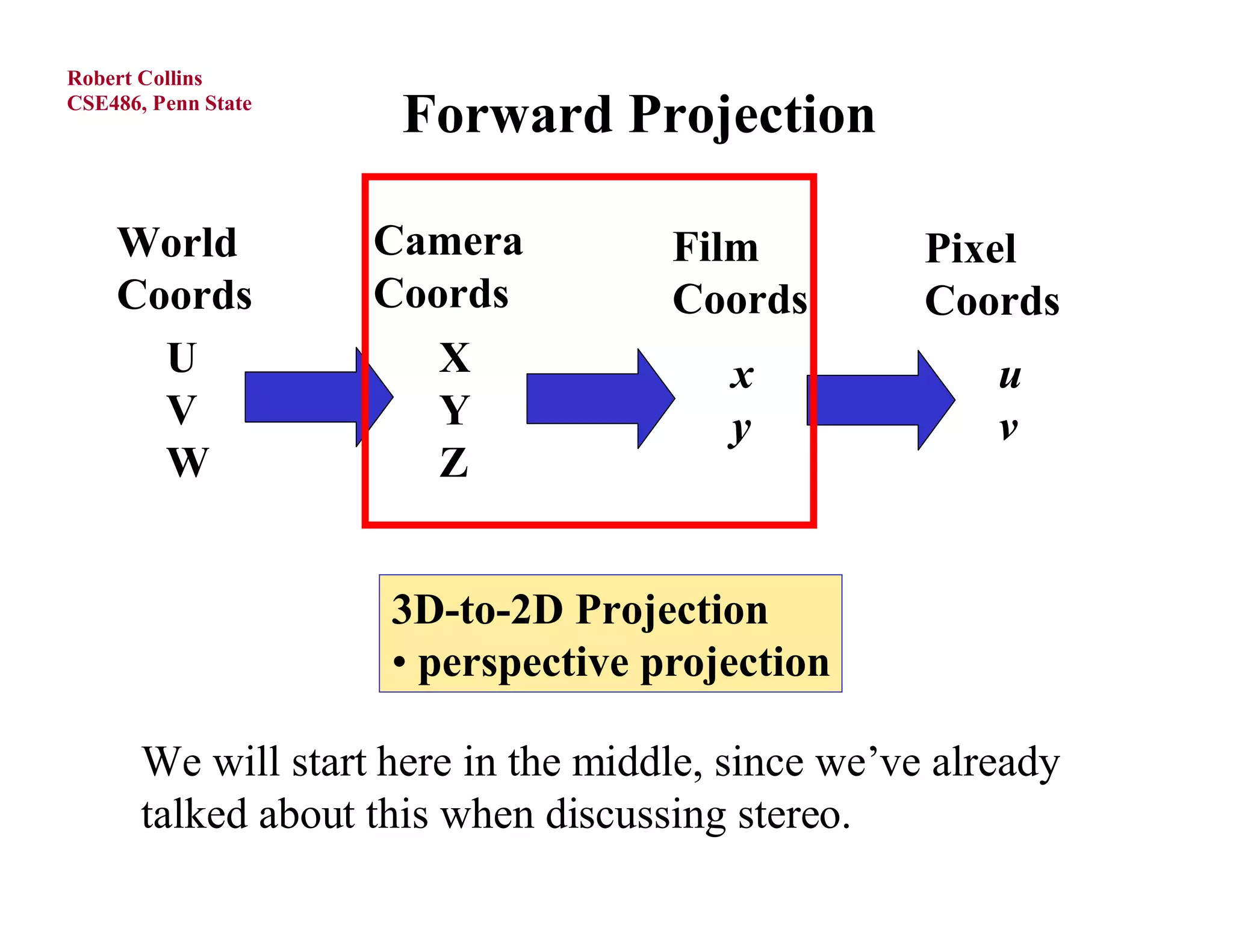
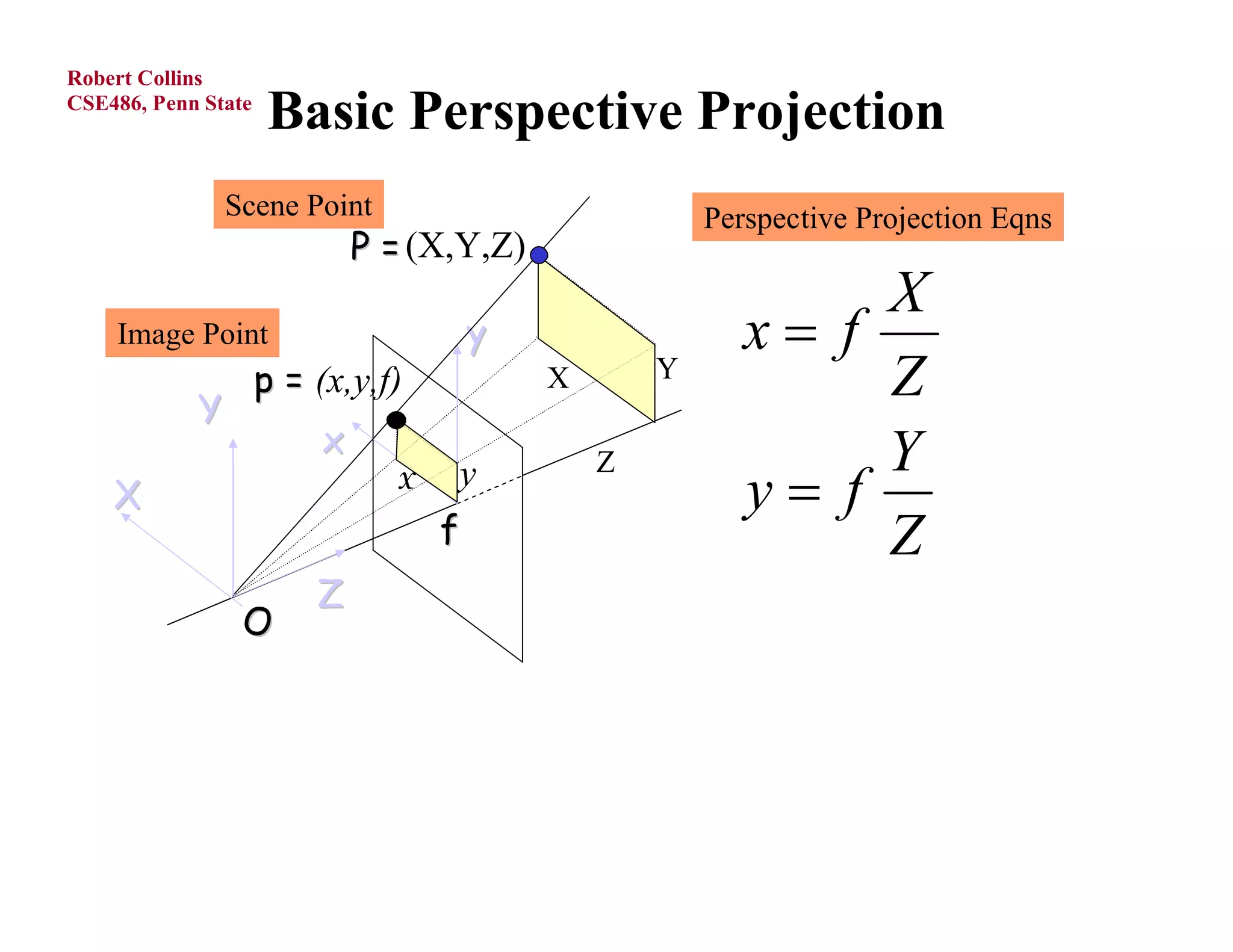
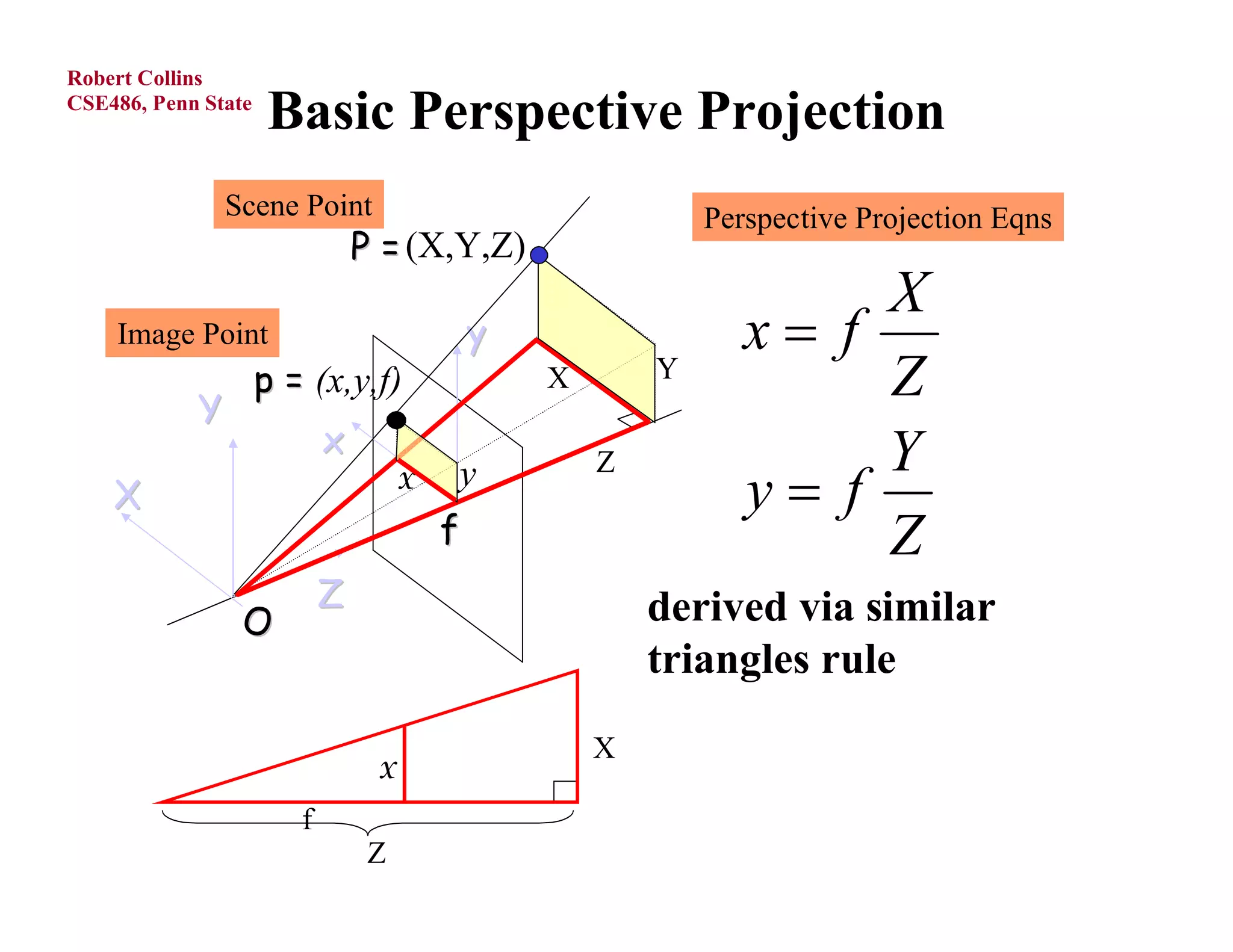
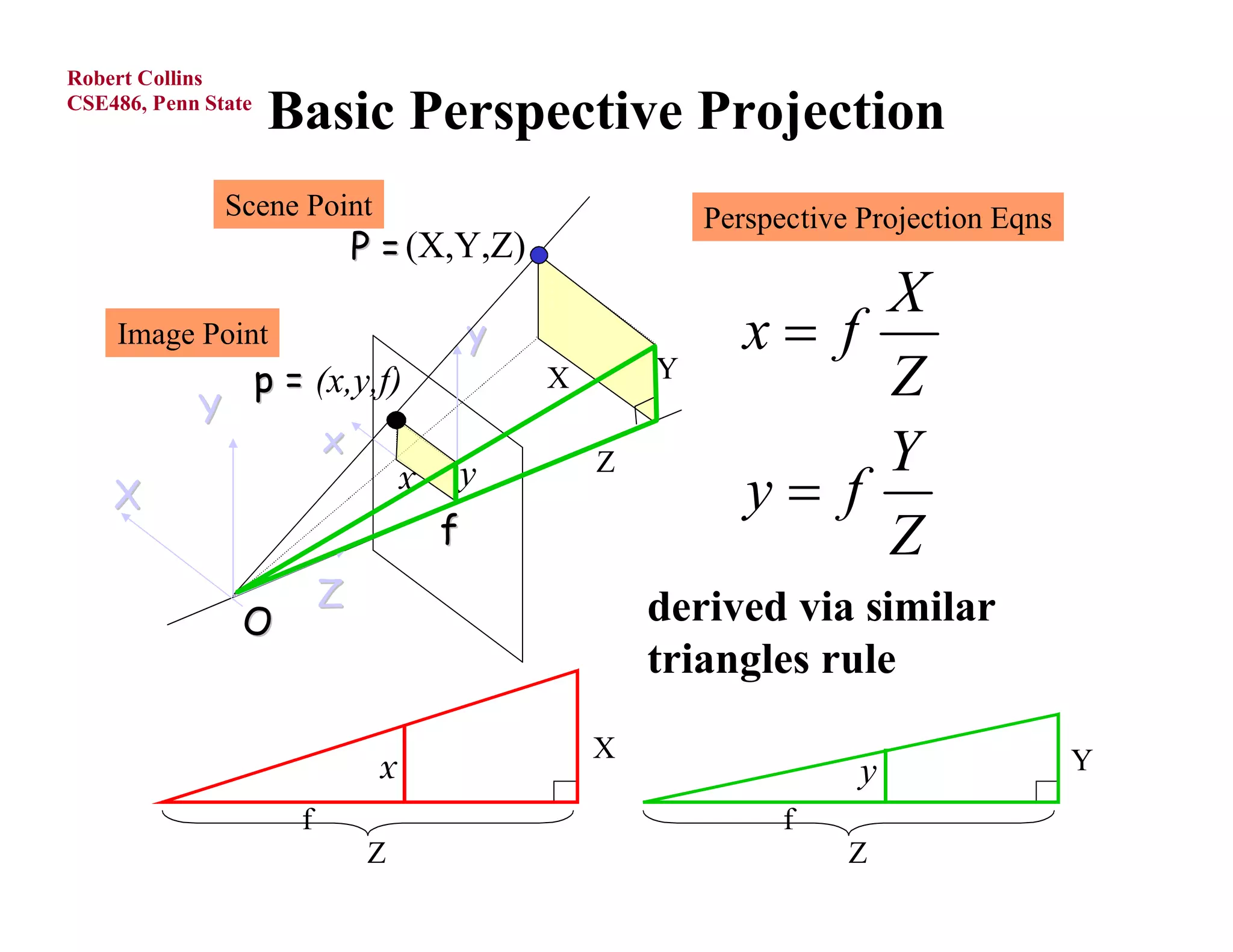
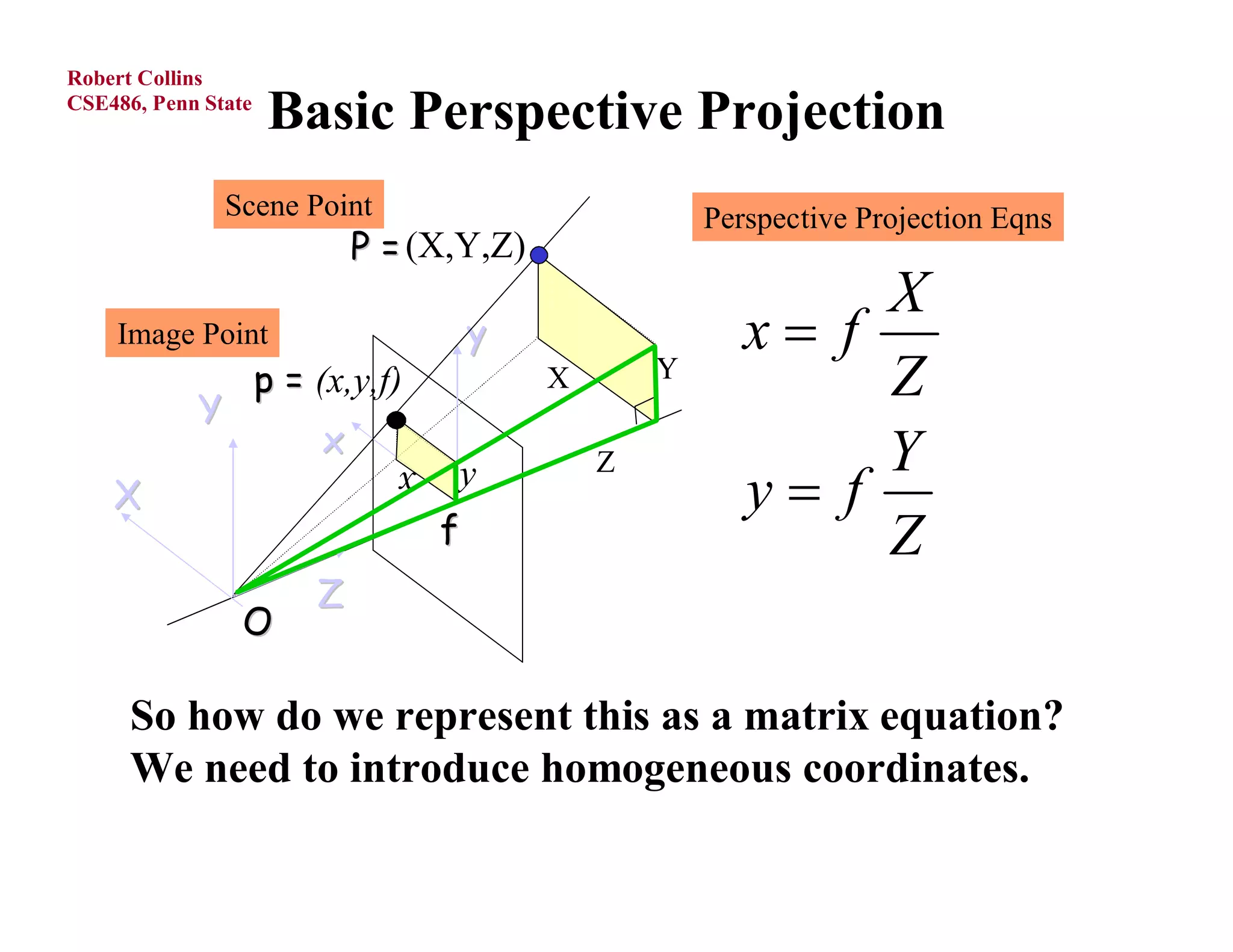
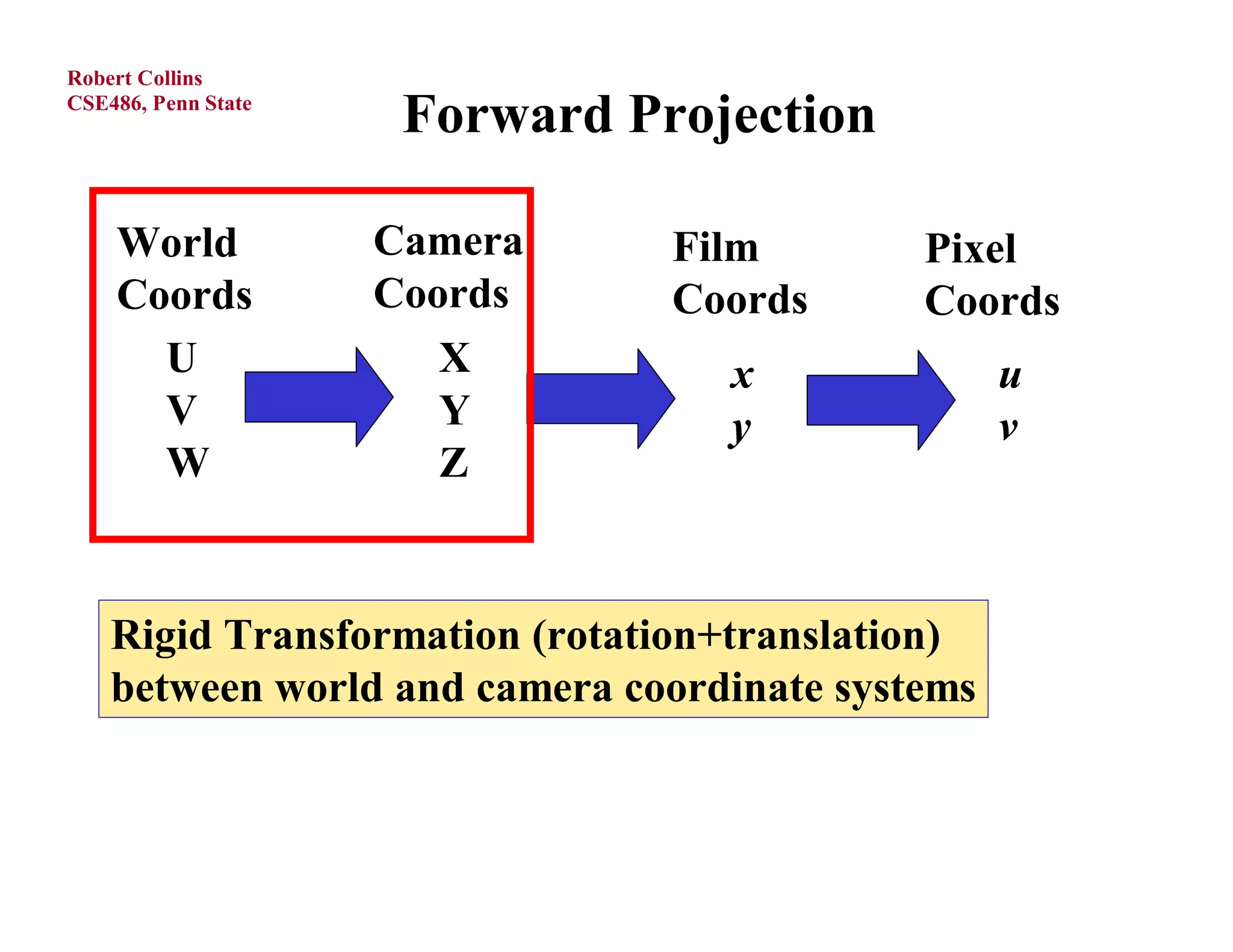
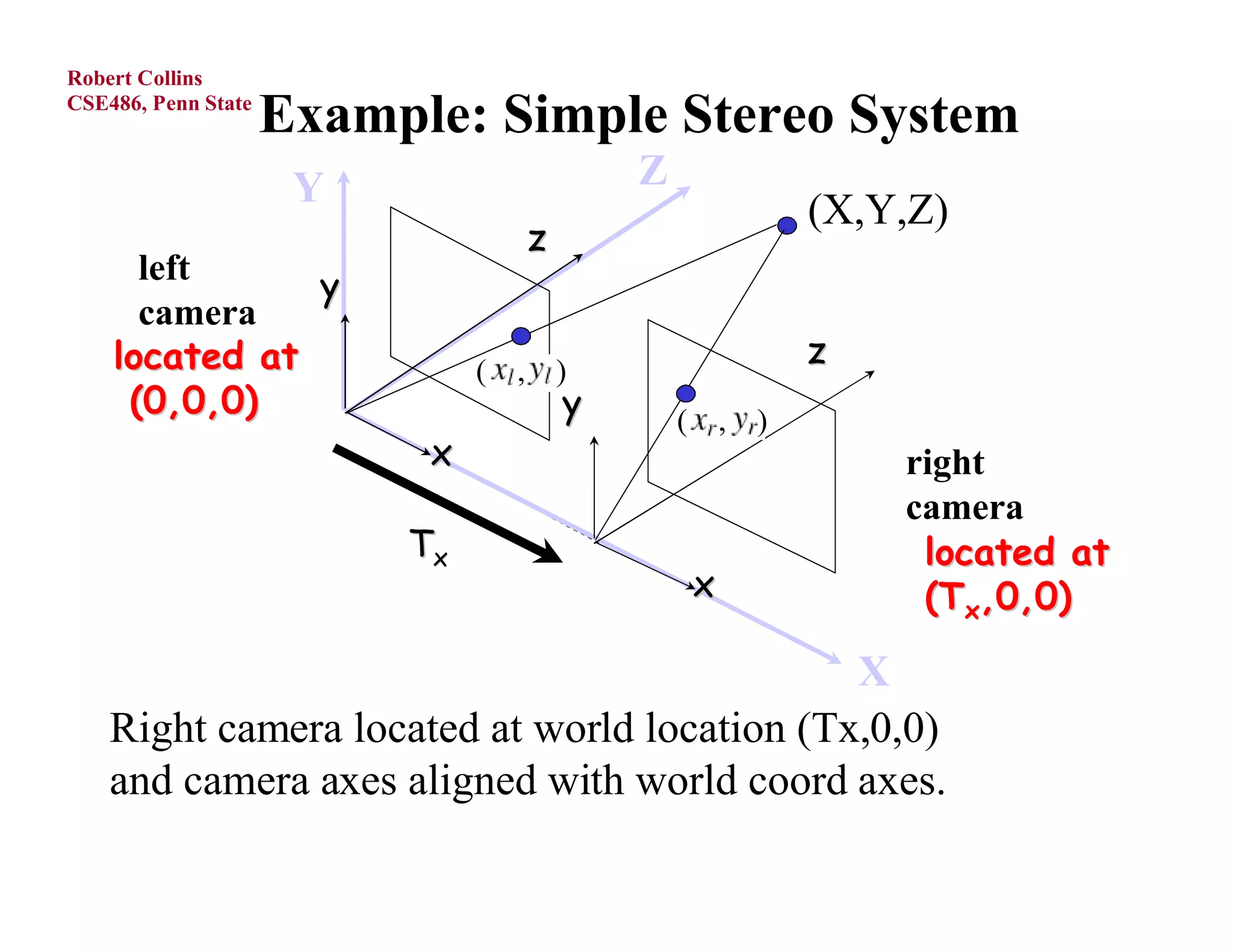
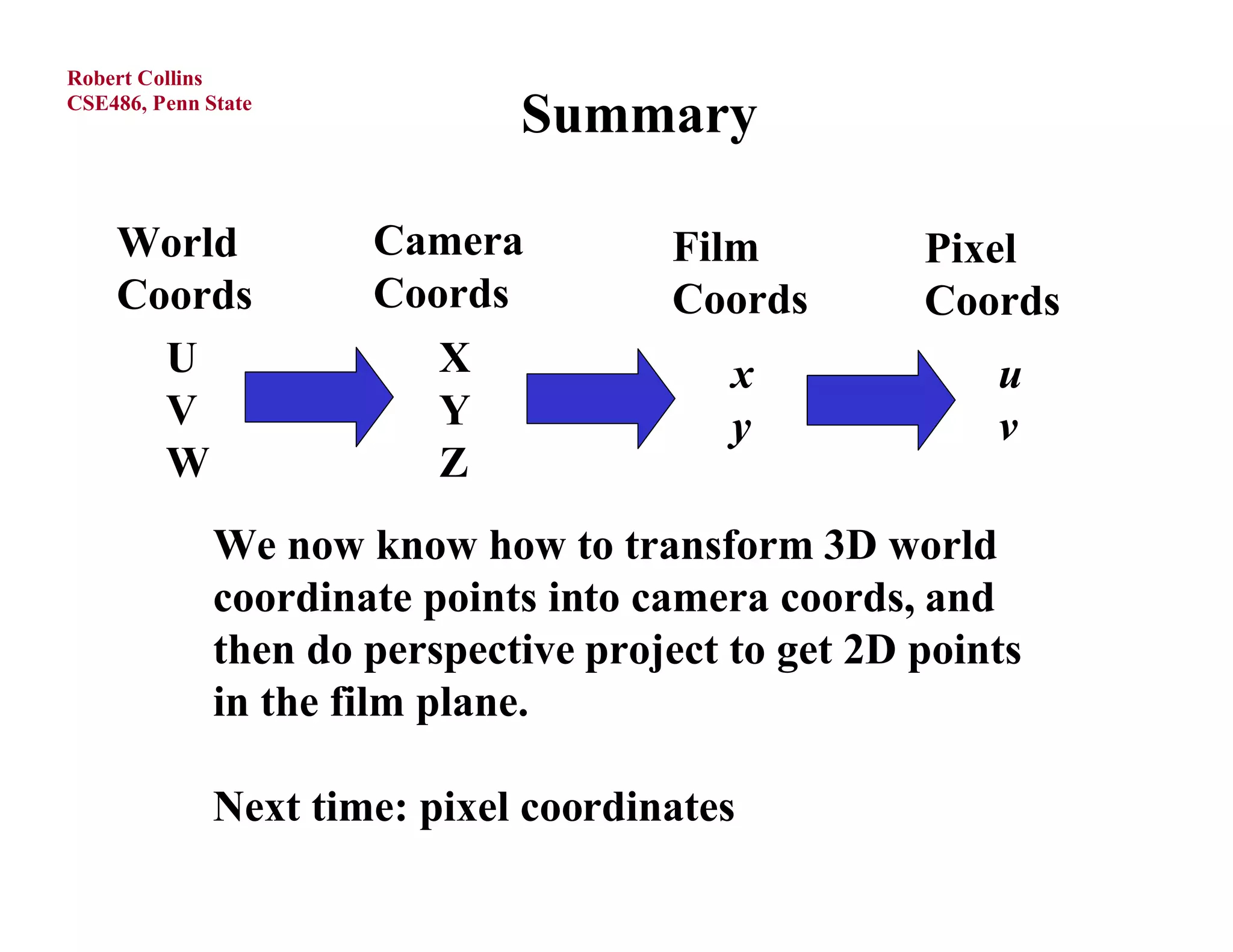
1) Forward projection, which projects 3D points in a world coordinate system onto a 2D image plane using perspective projection.
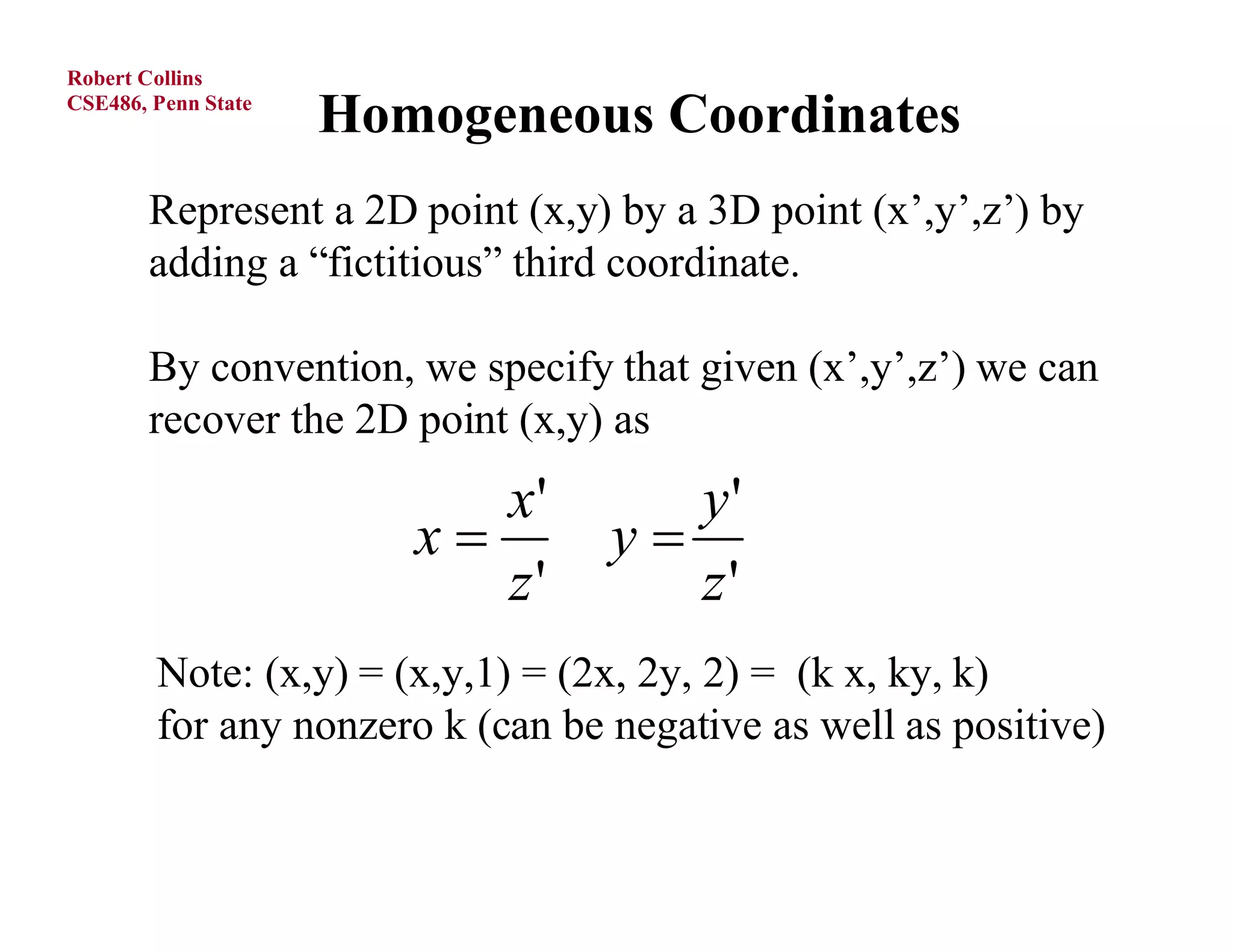
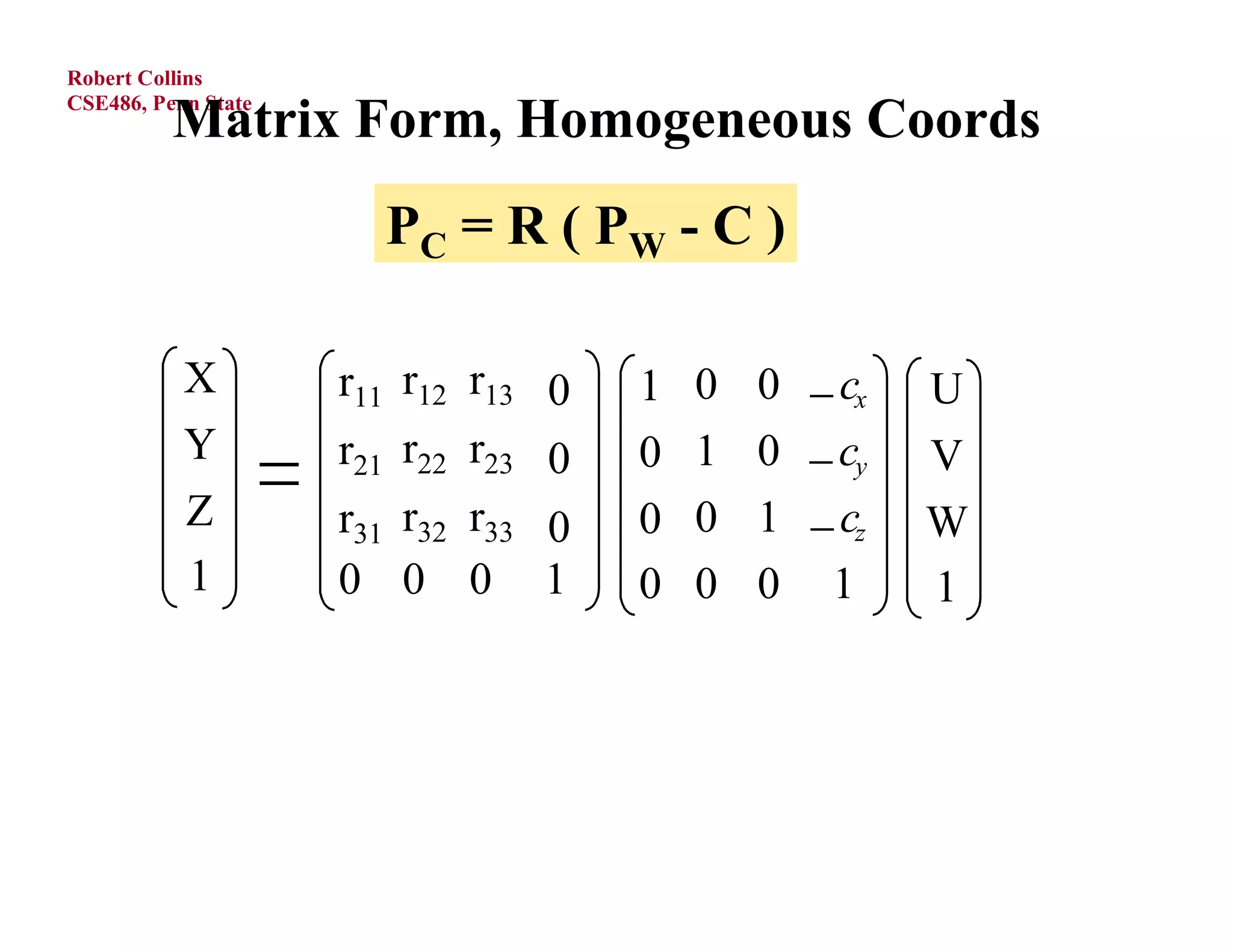
2) Homogeneous coordinates, which represent 2D image points with an extra "fictitious" coordinate to write projection mathematically as a matrix equation.
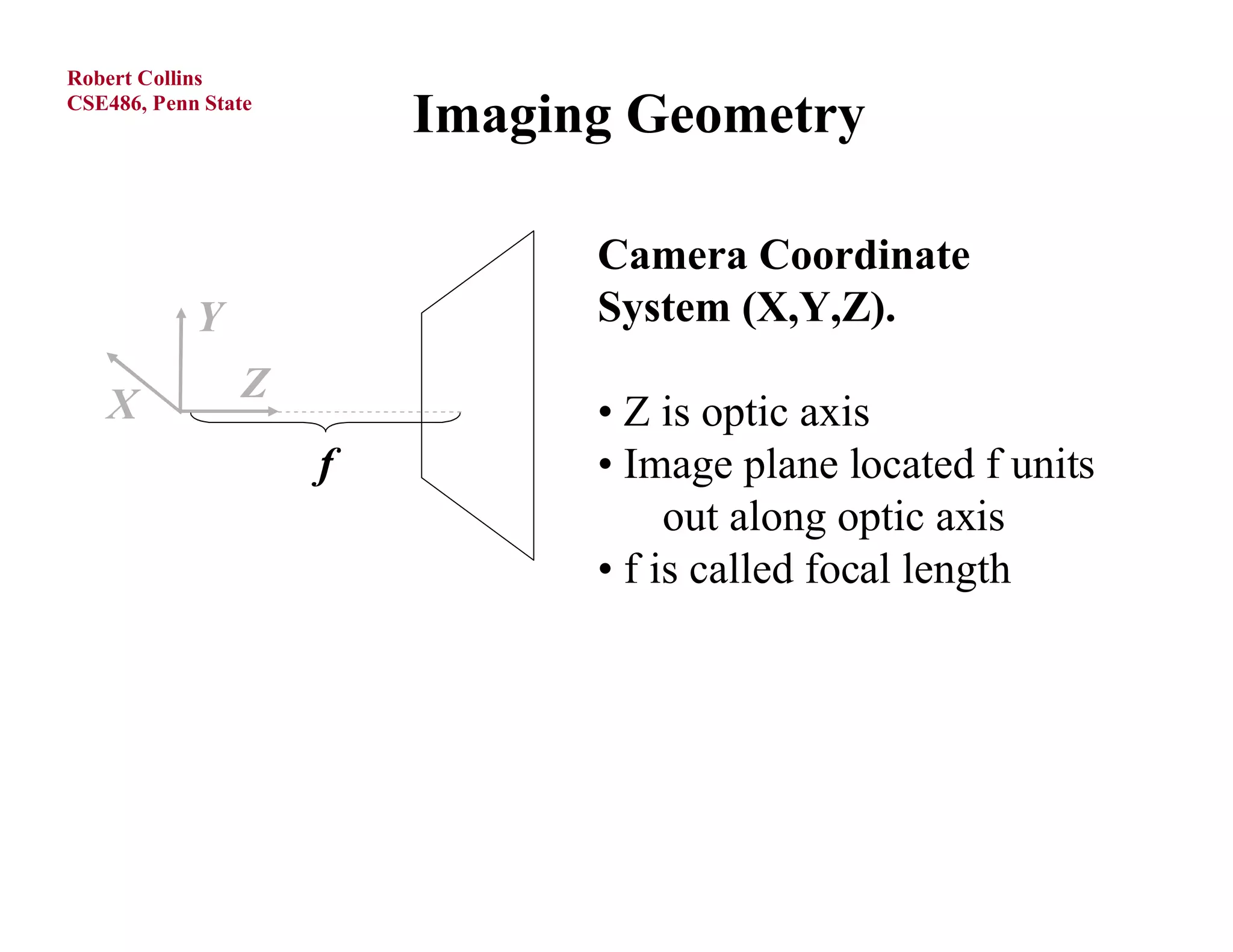
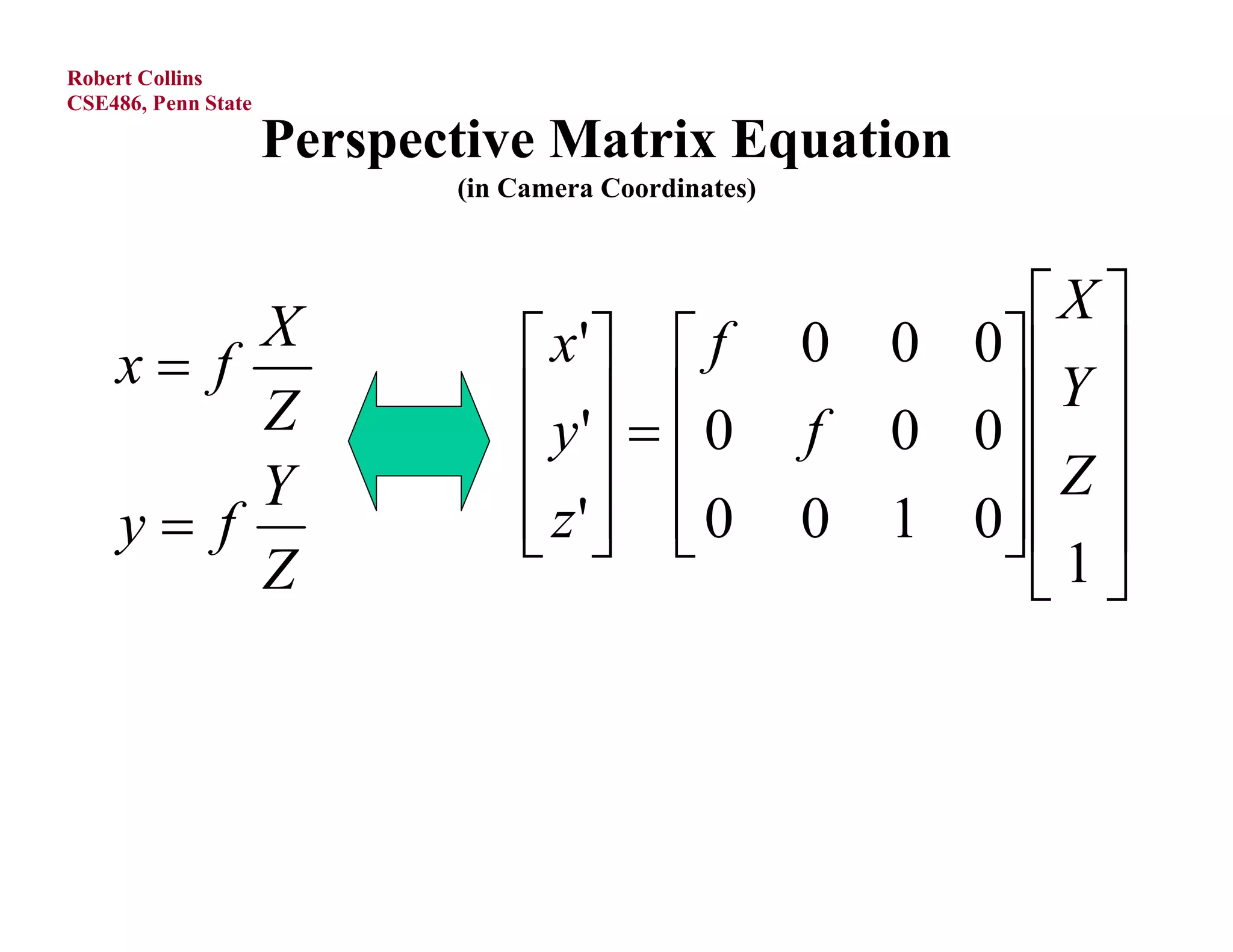
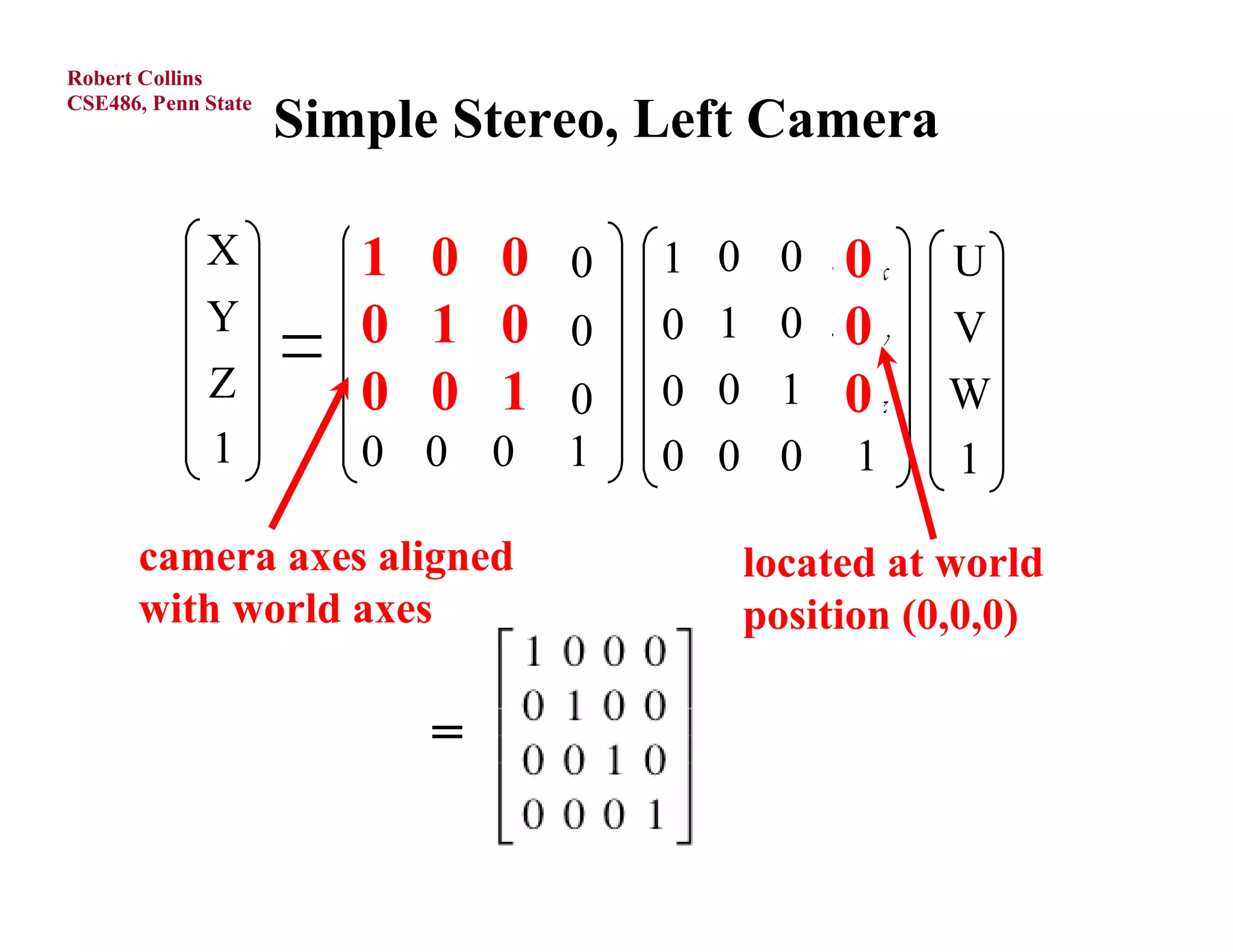
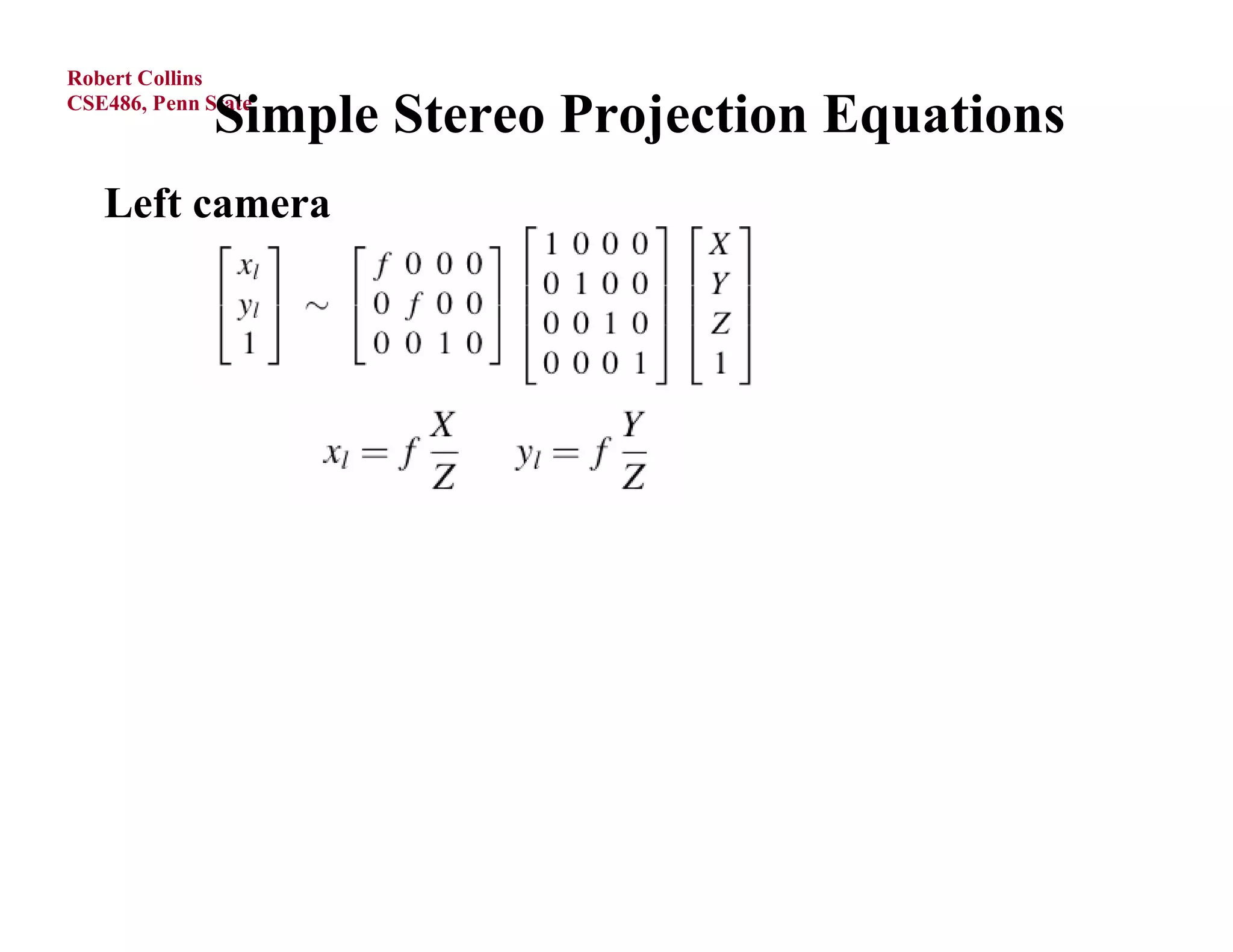
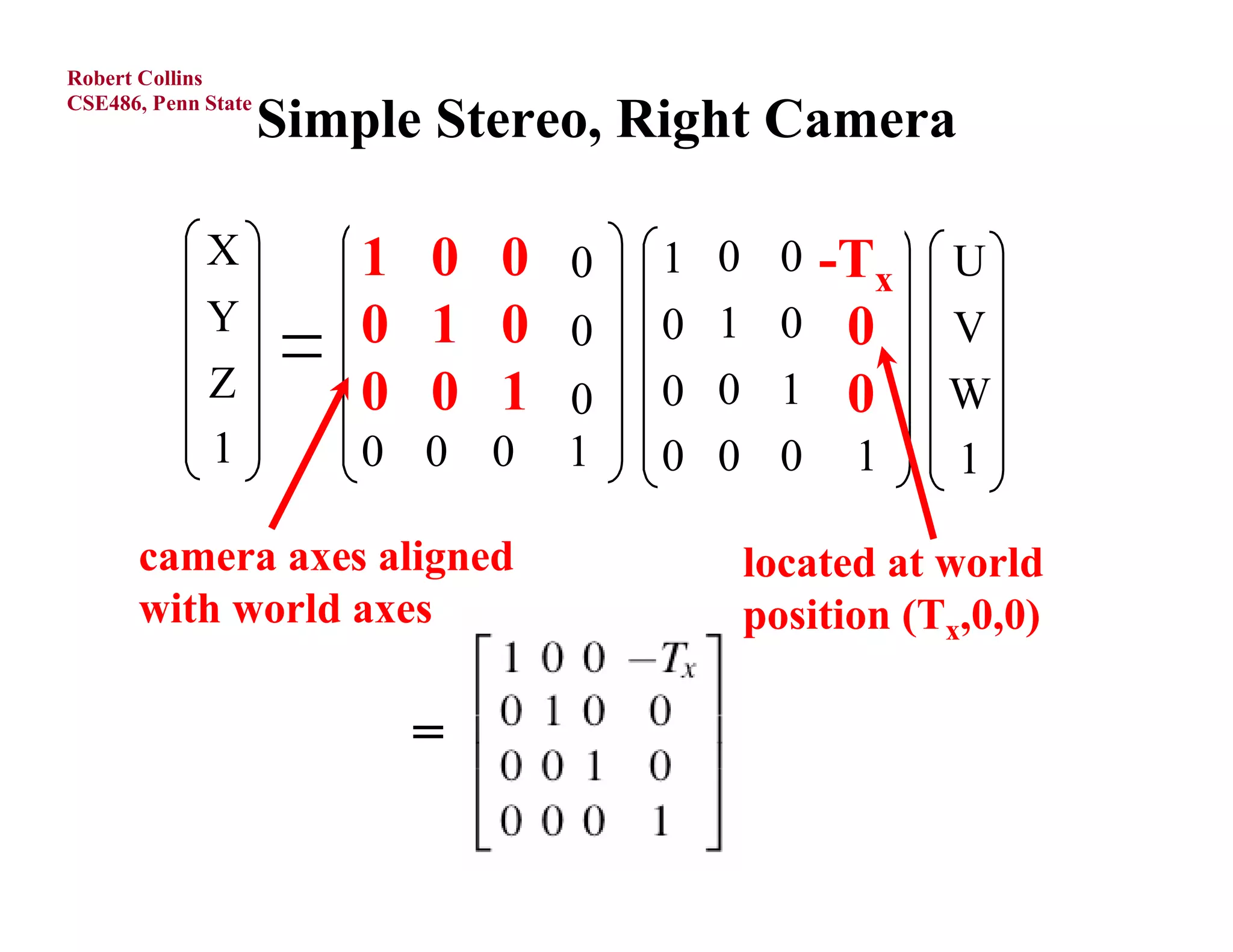
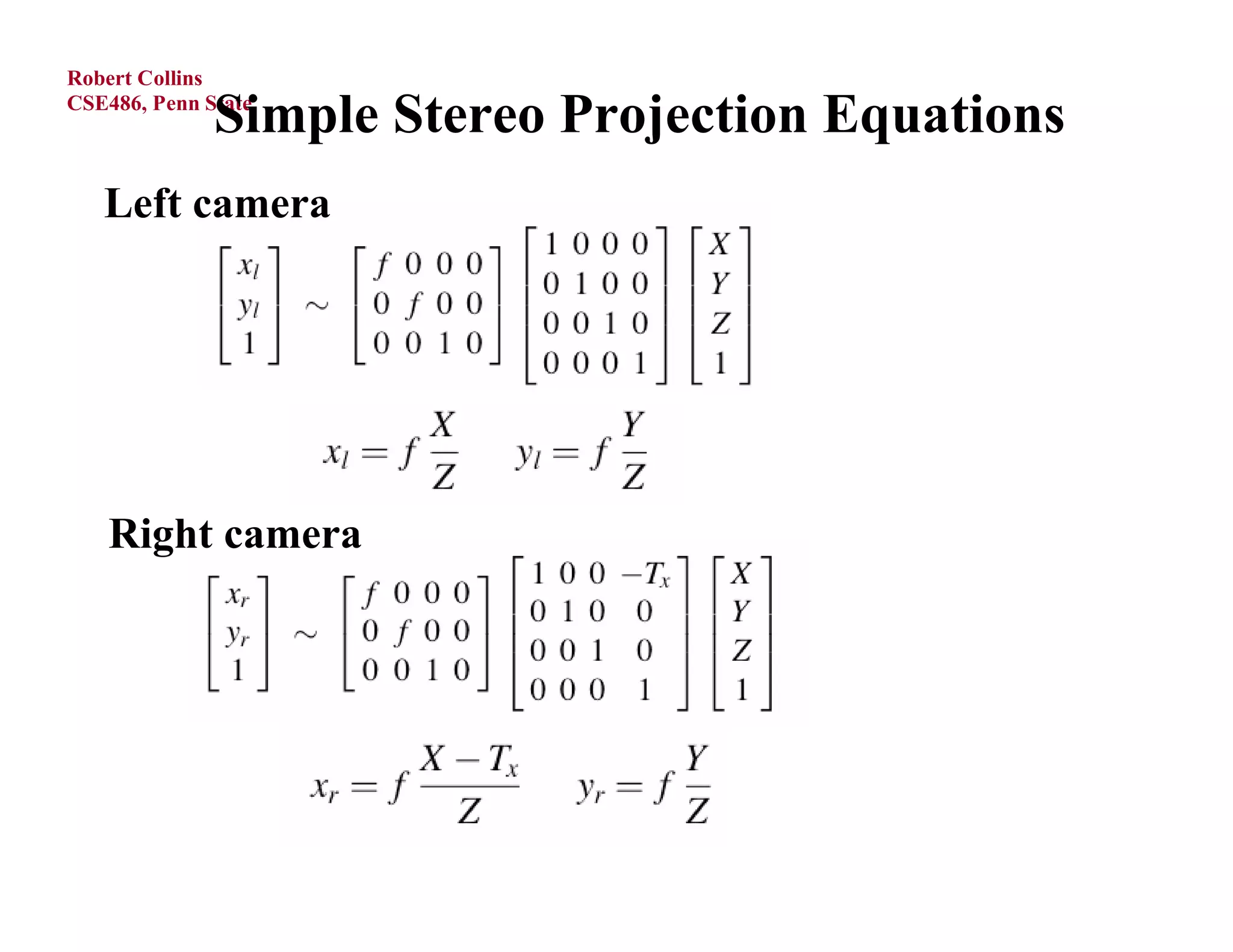
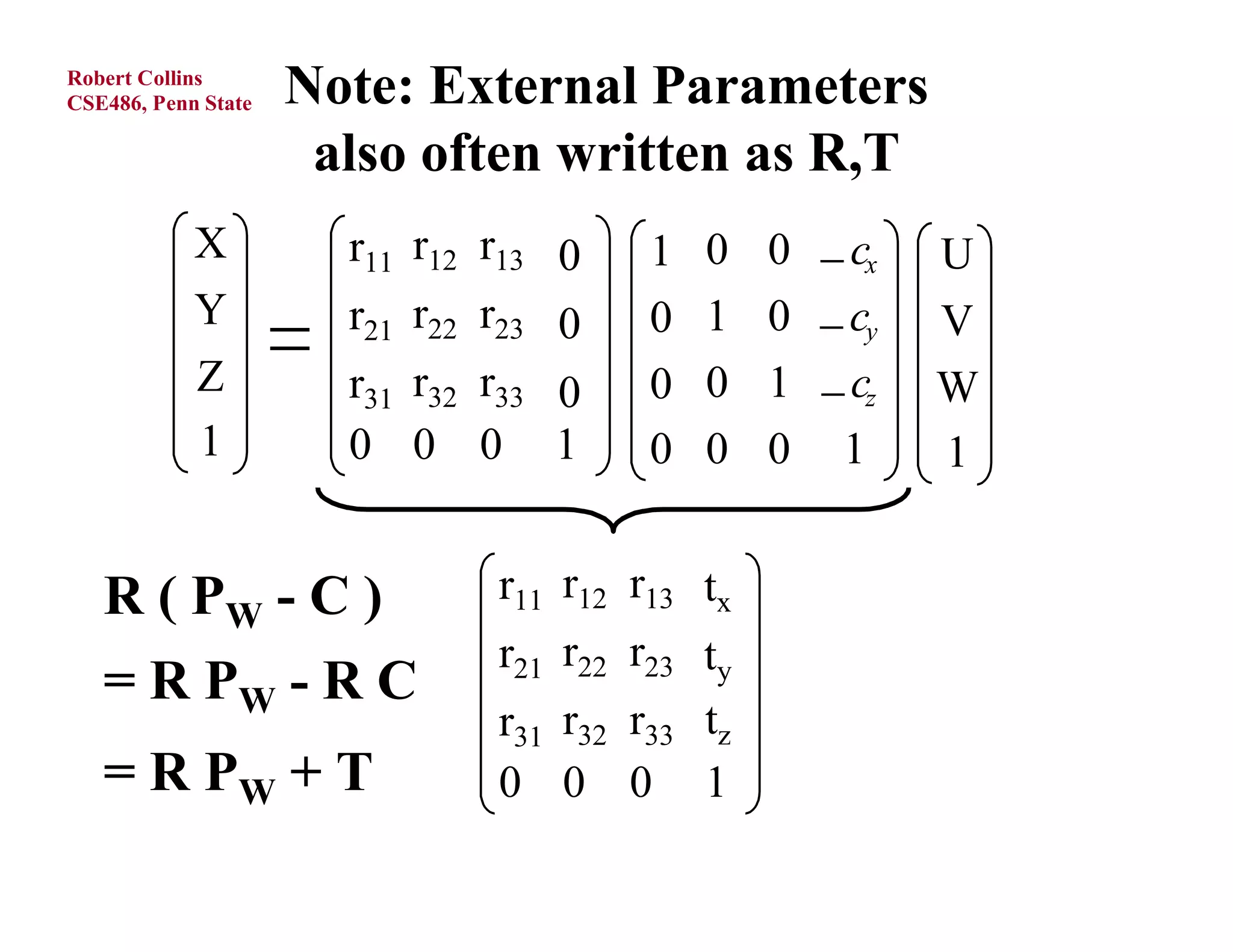
3) The perspective projection matrix, which models the transformation from 3D camera coordinates to 2D image coordinates using focal length and the perspective divide.