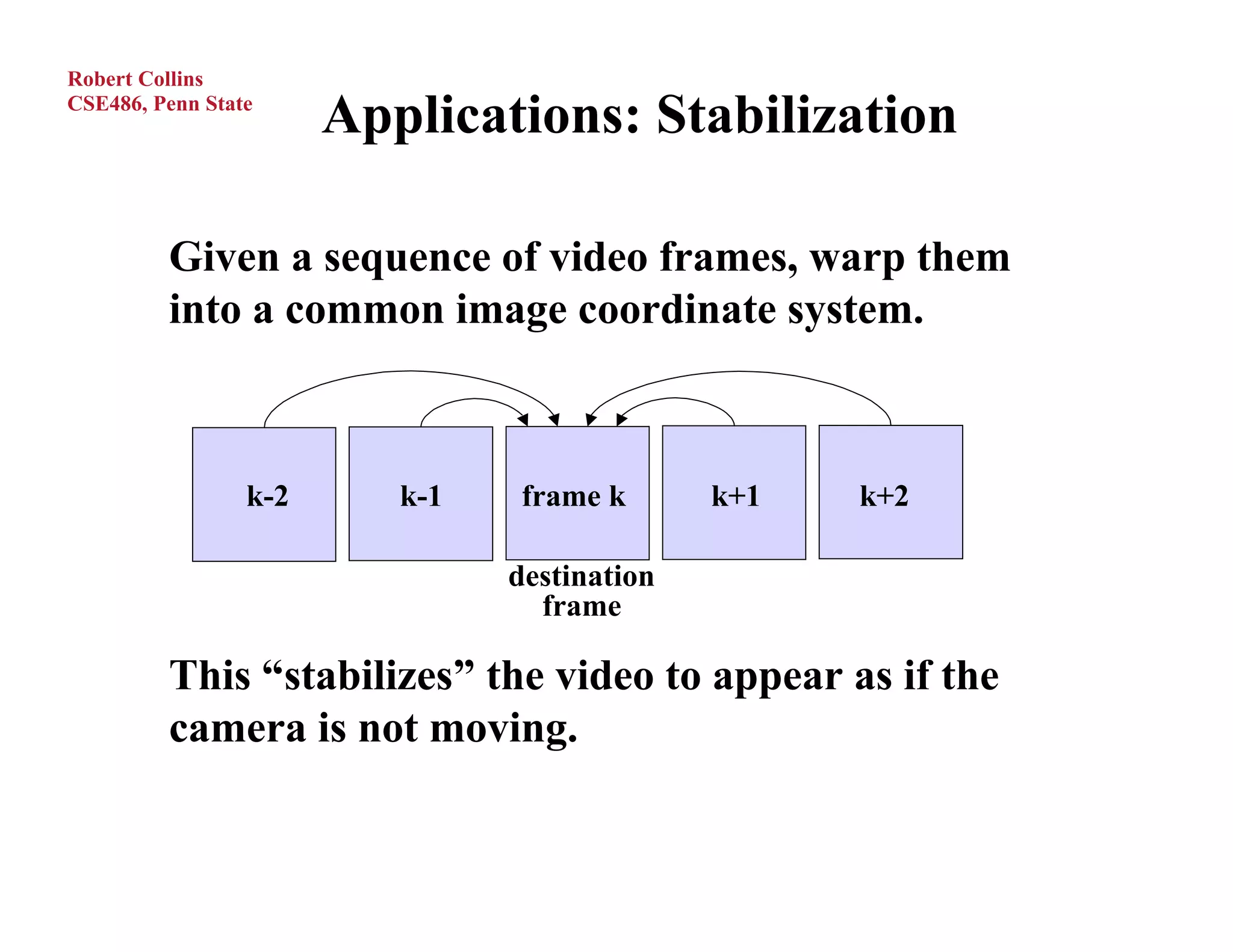
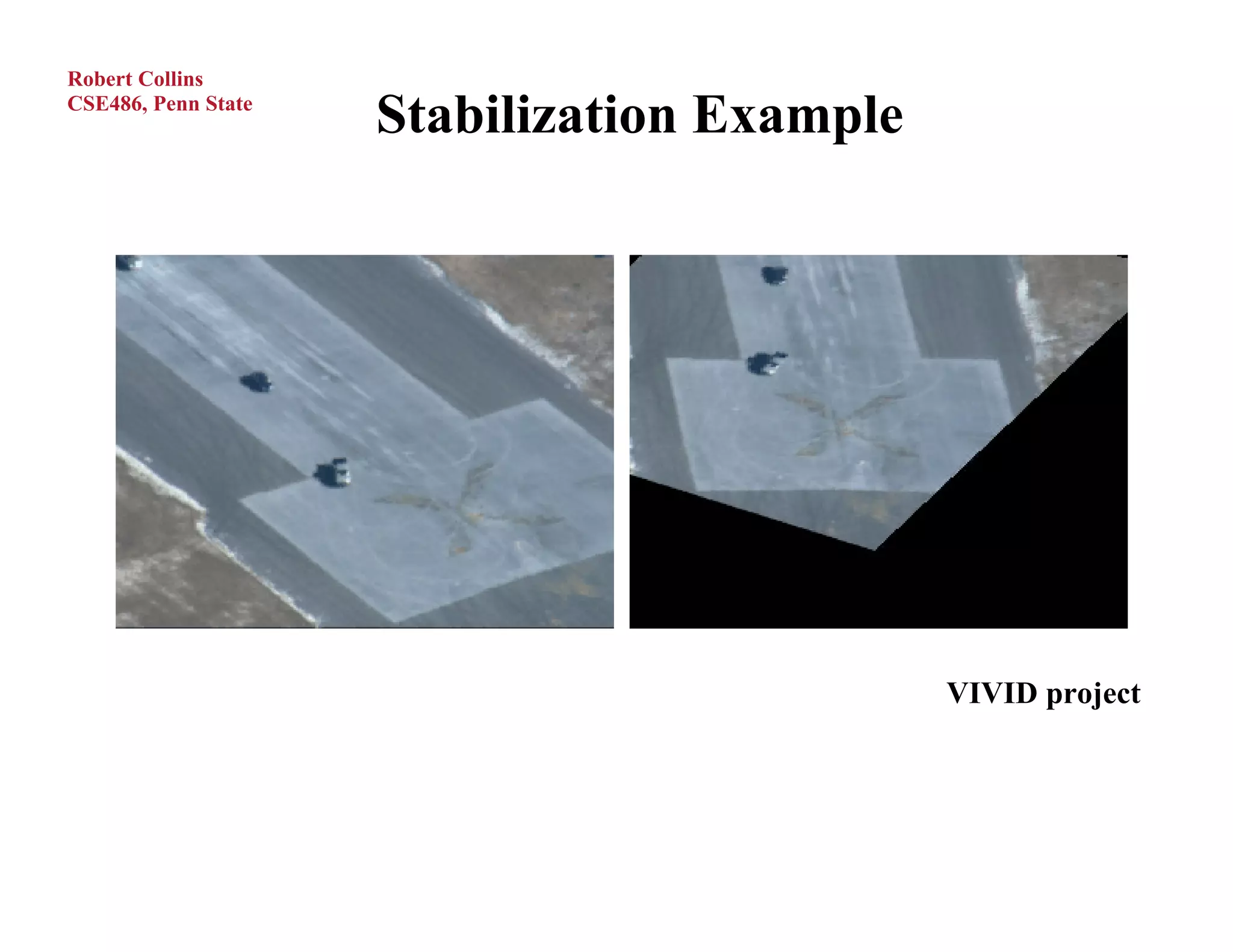
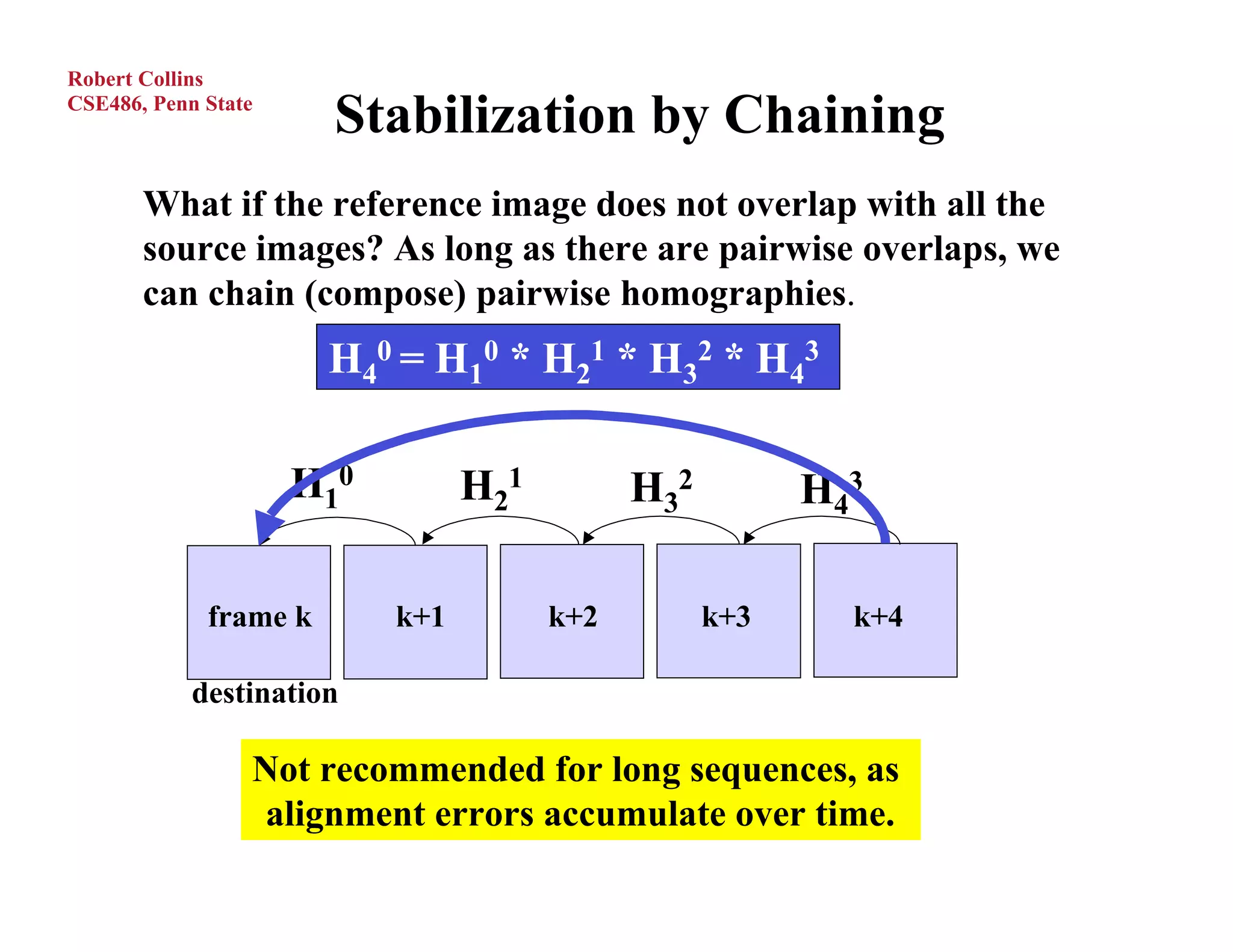
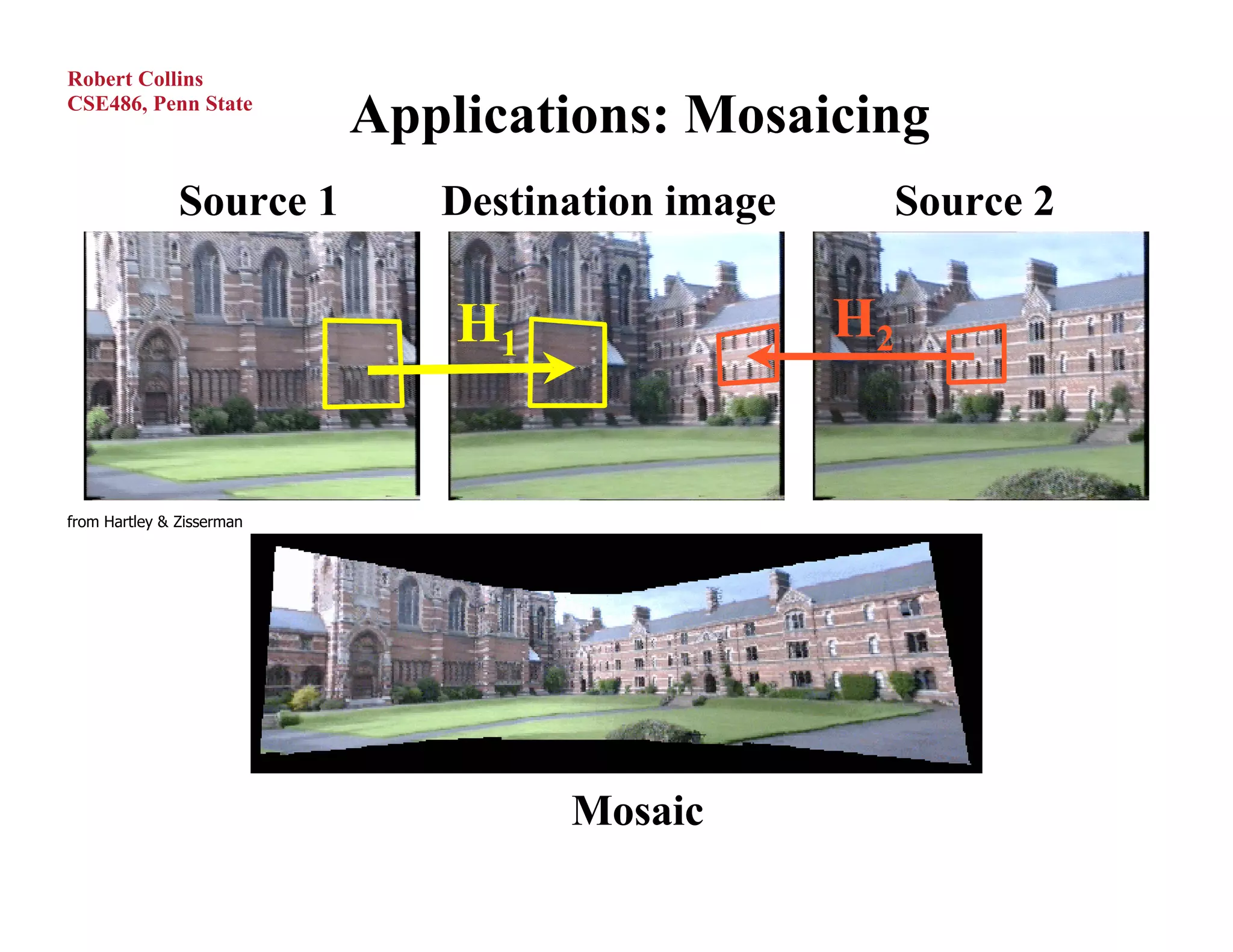
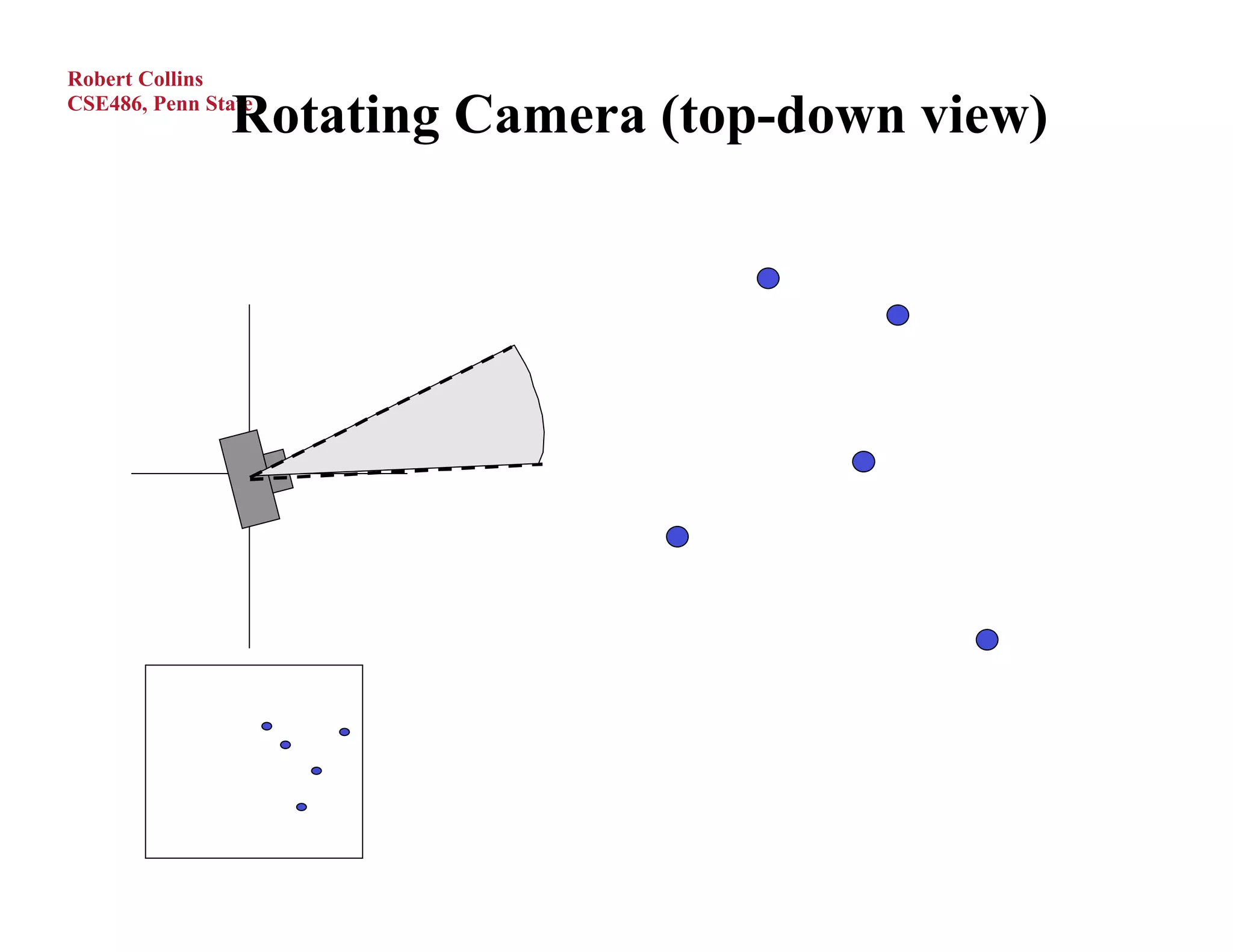
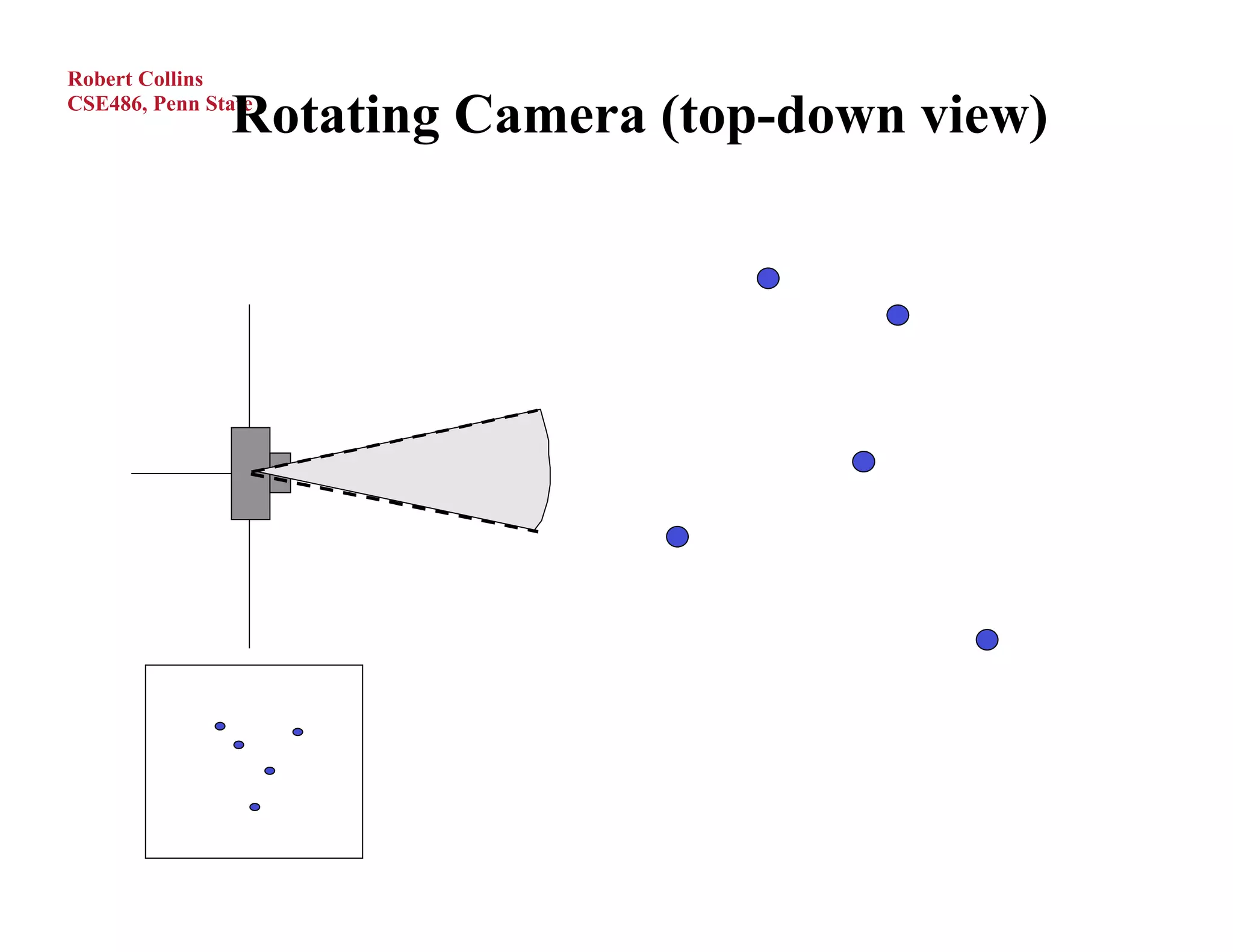
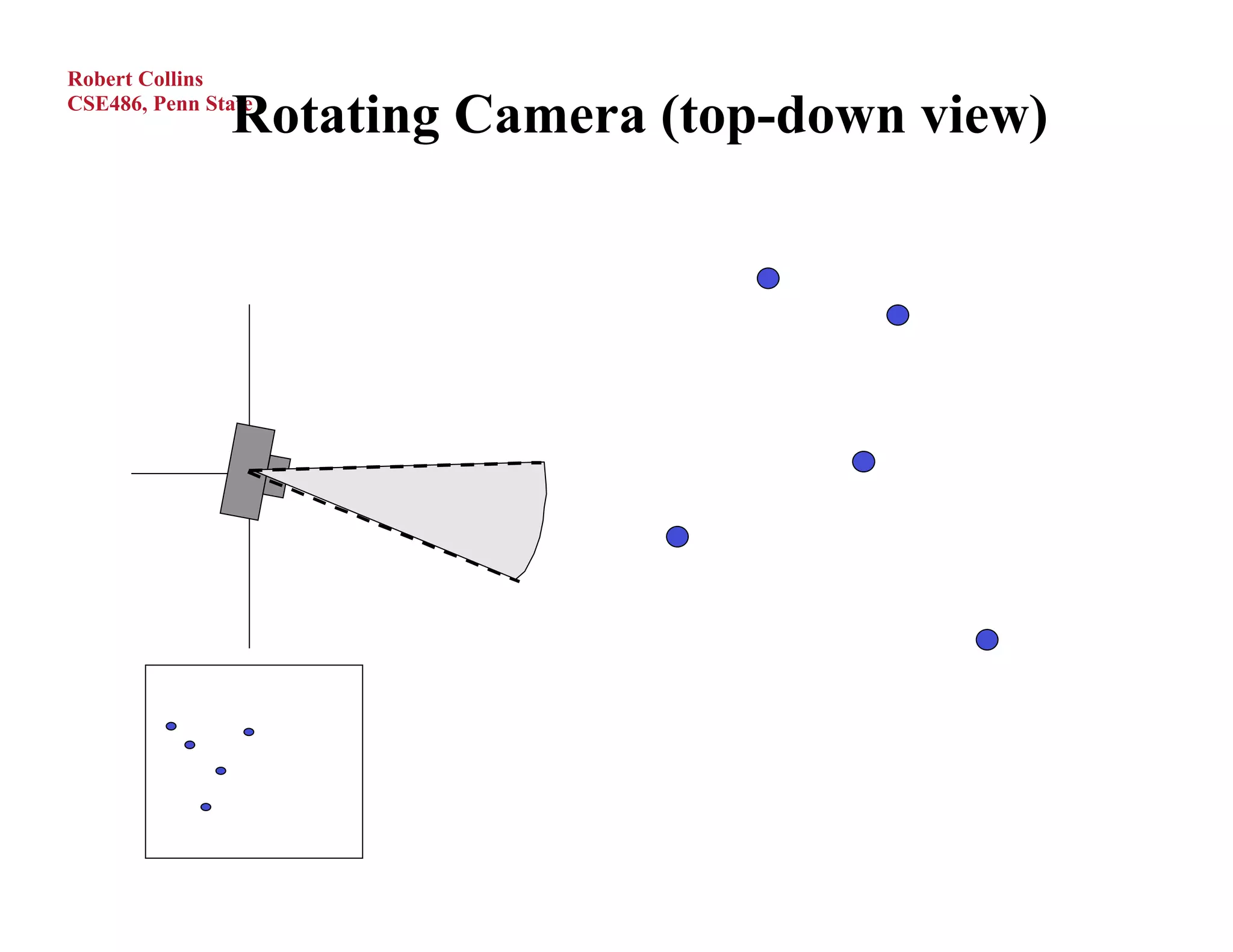
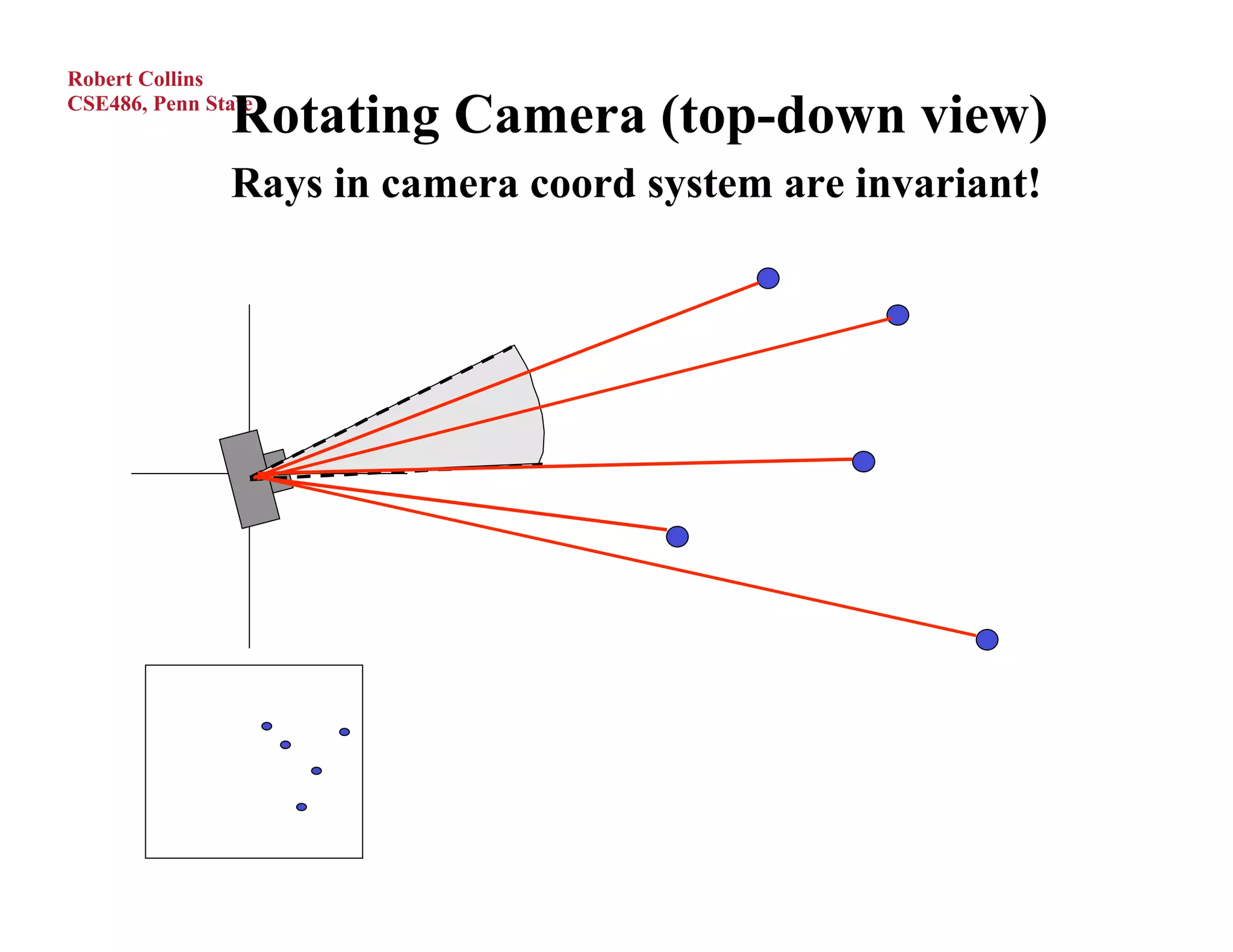
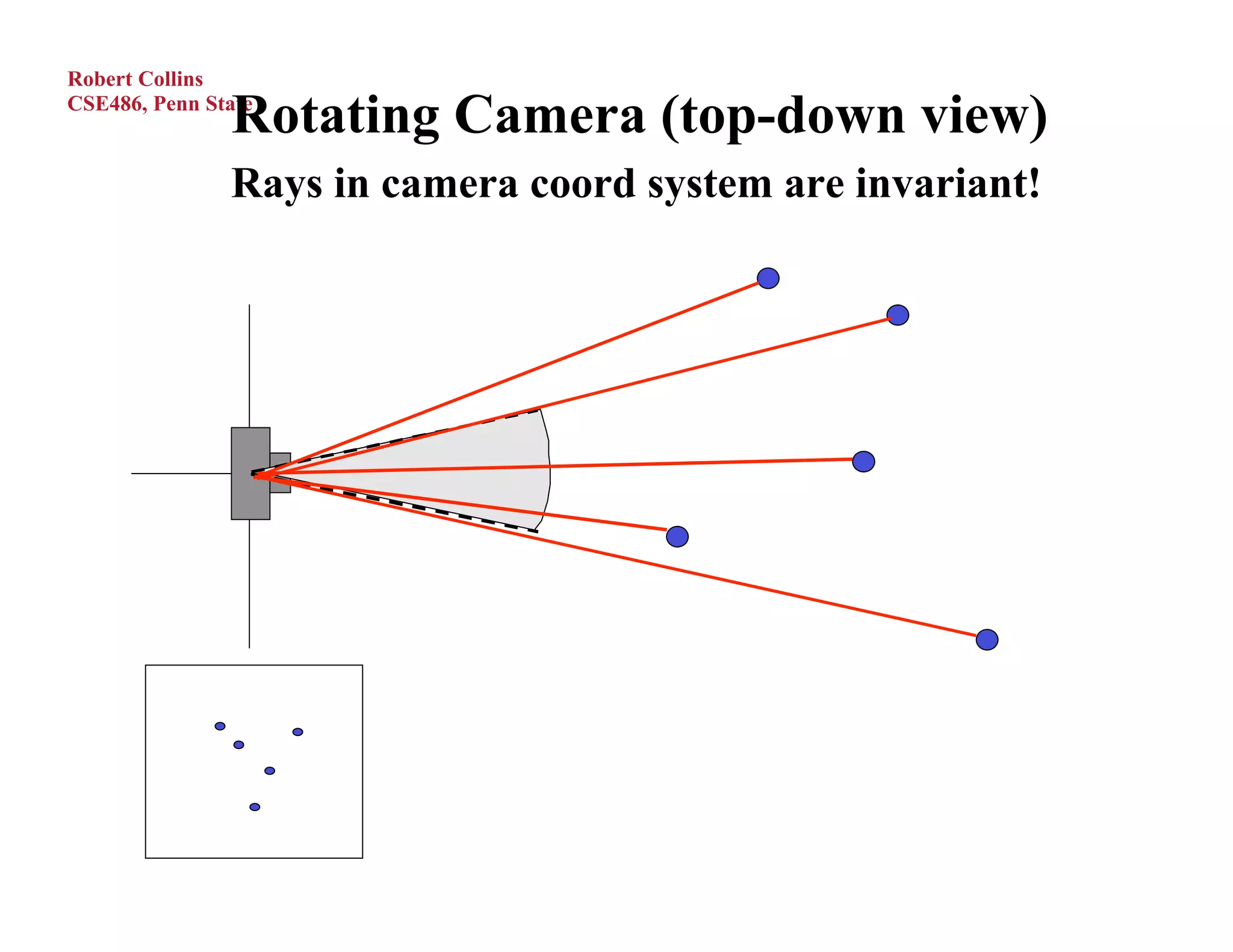
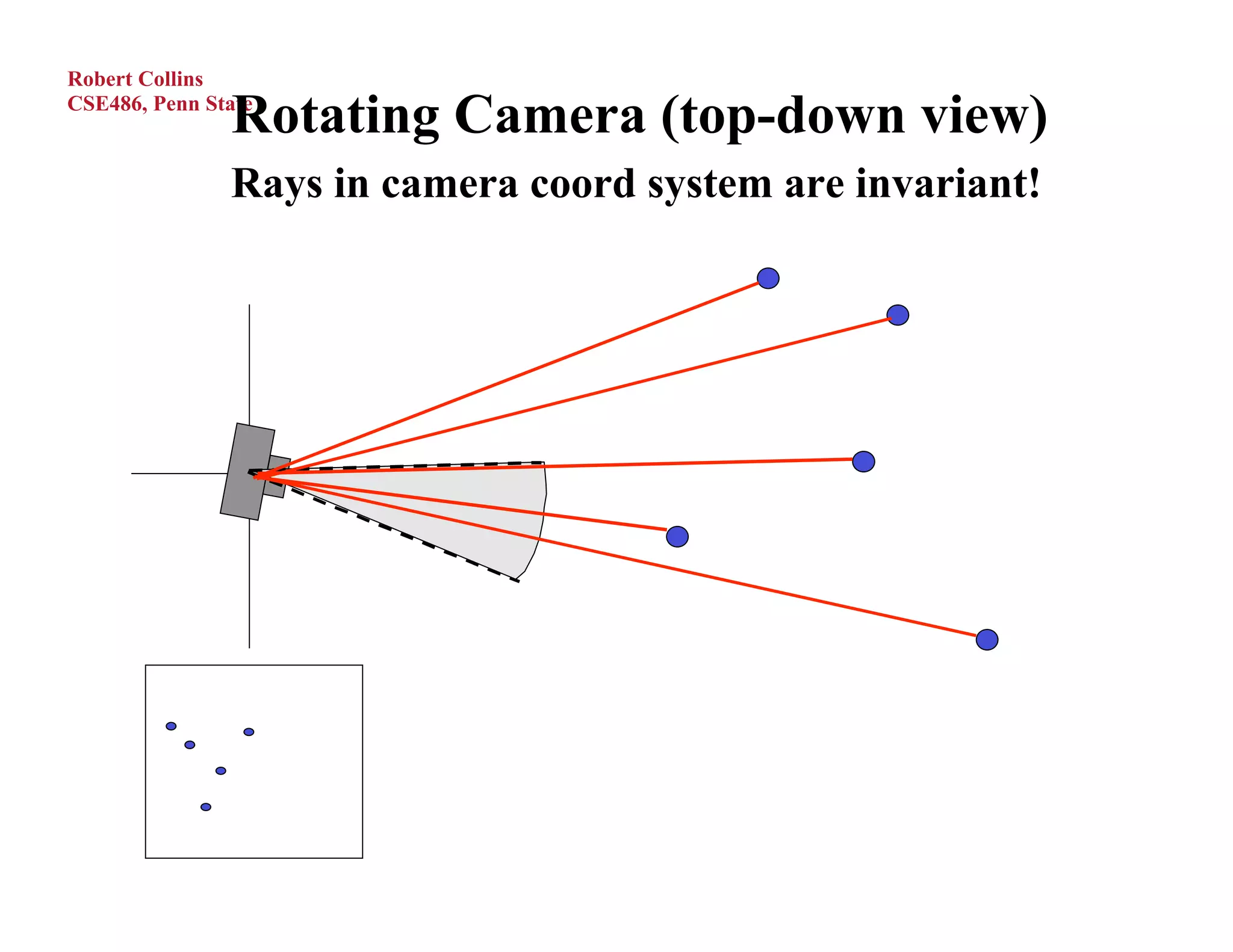
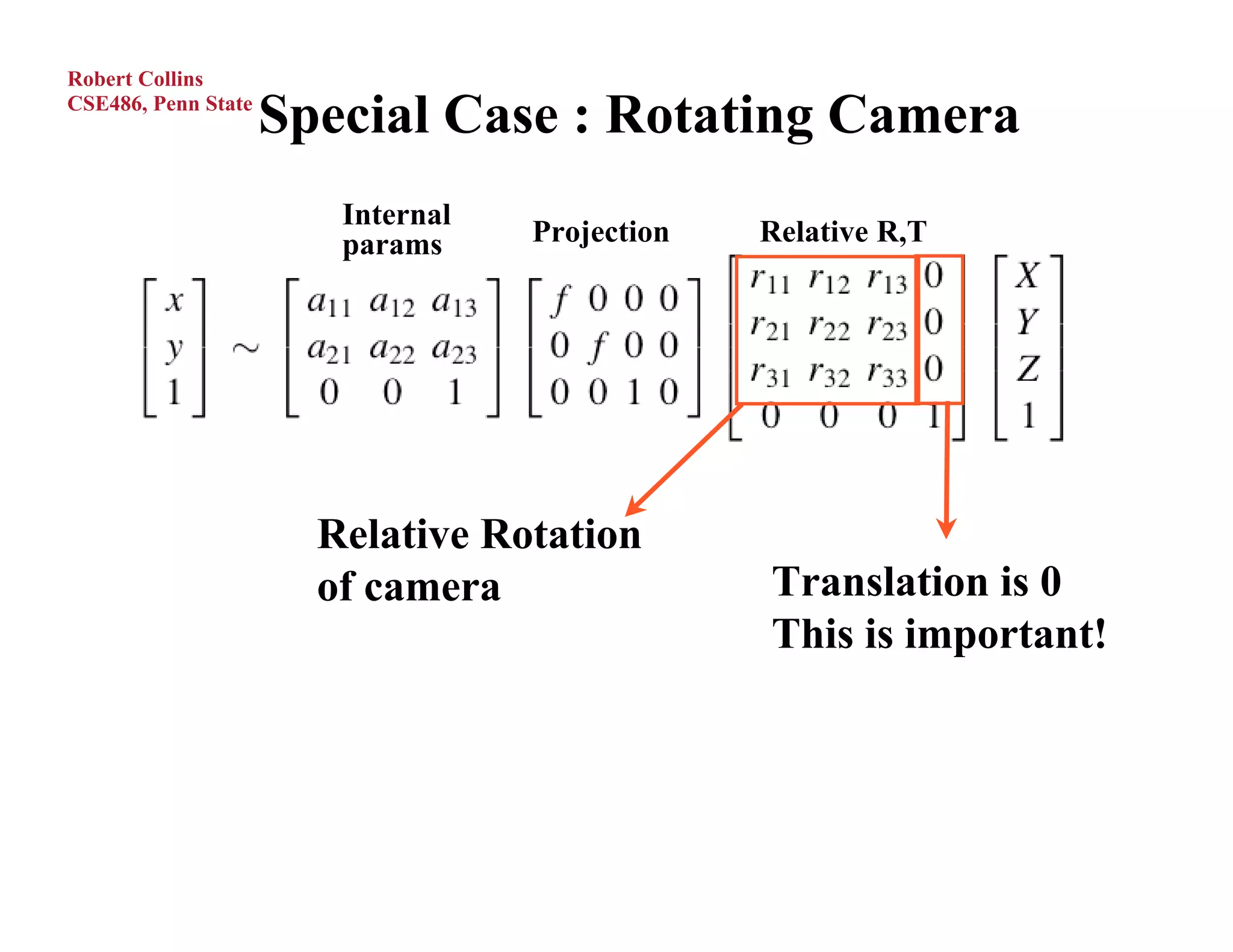
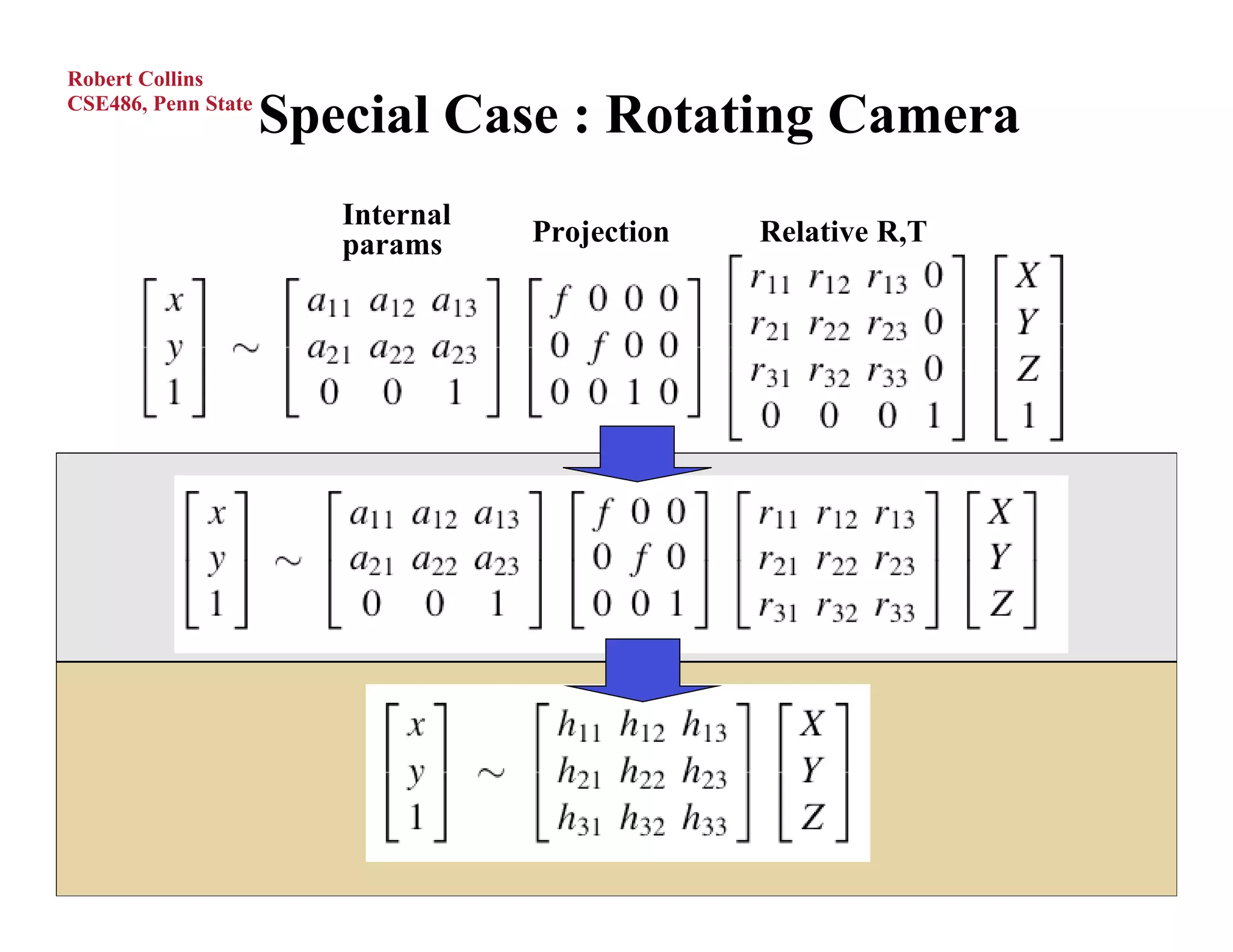
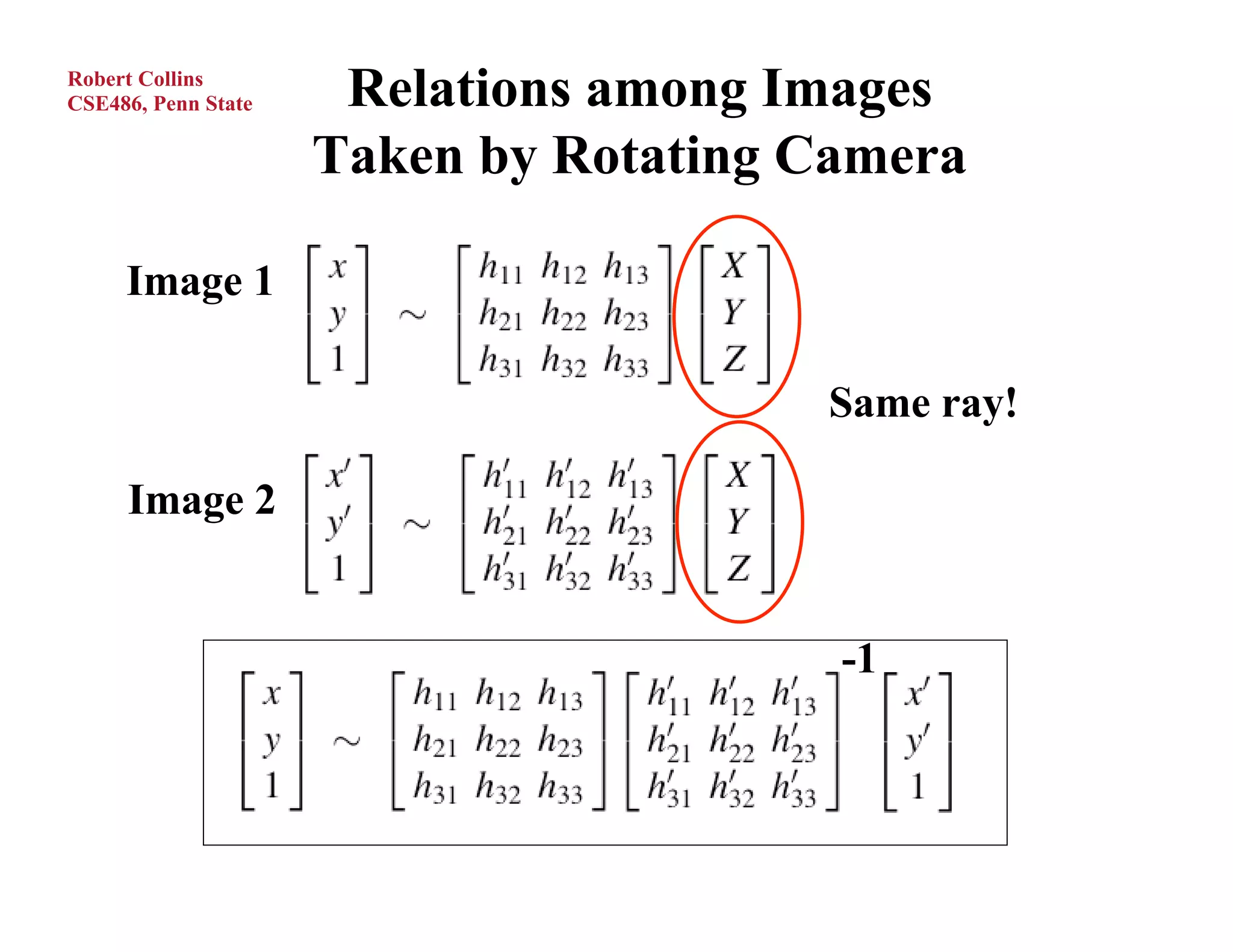
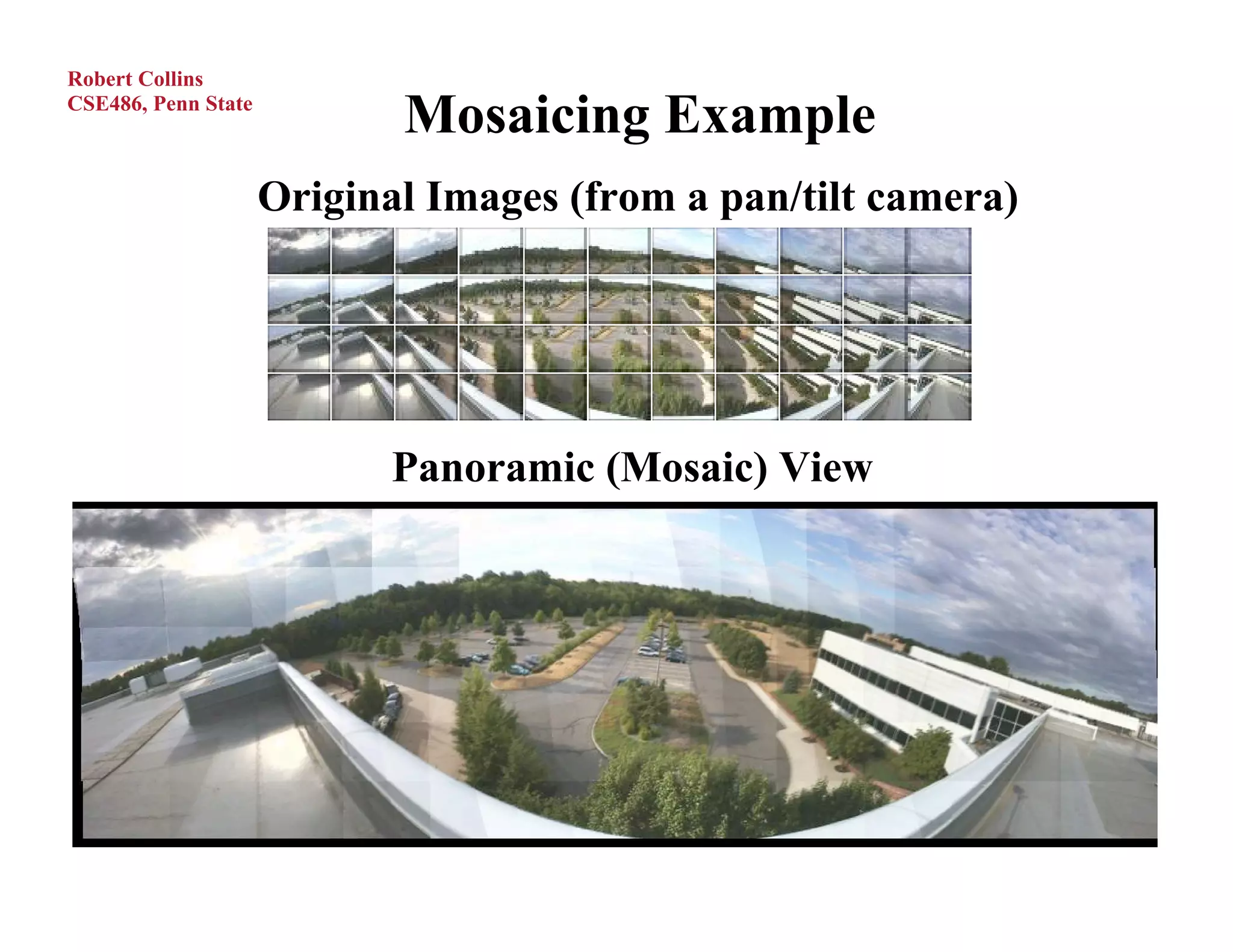
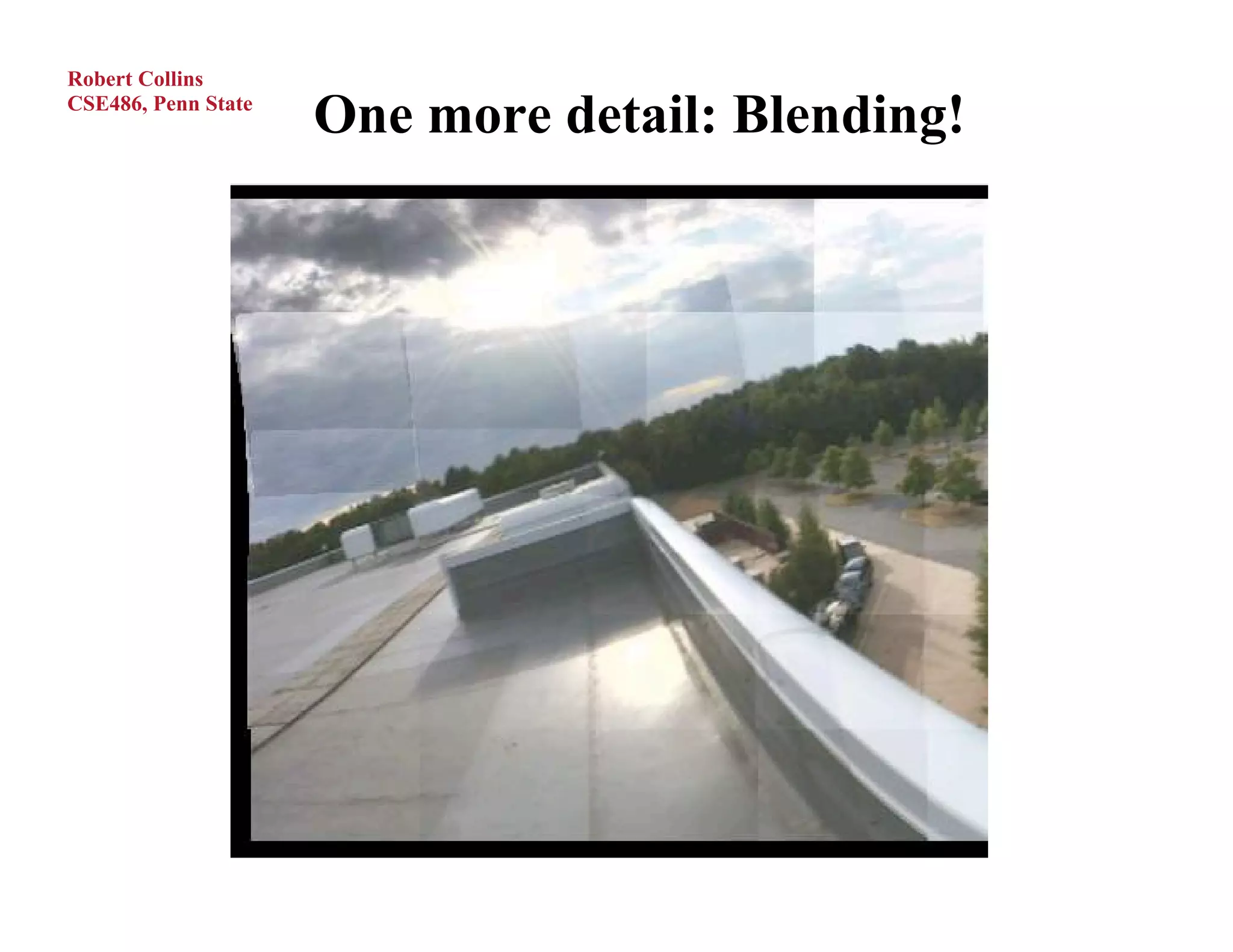
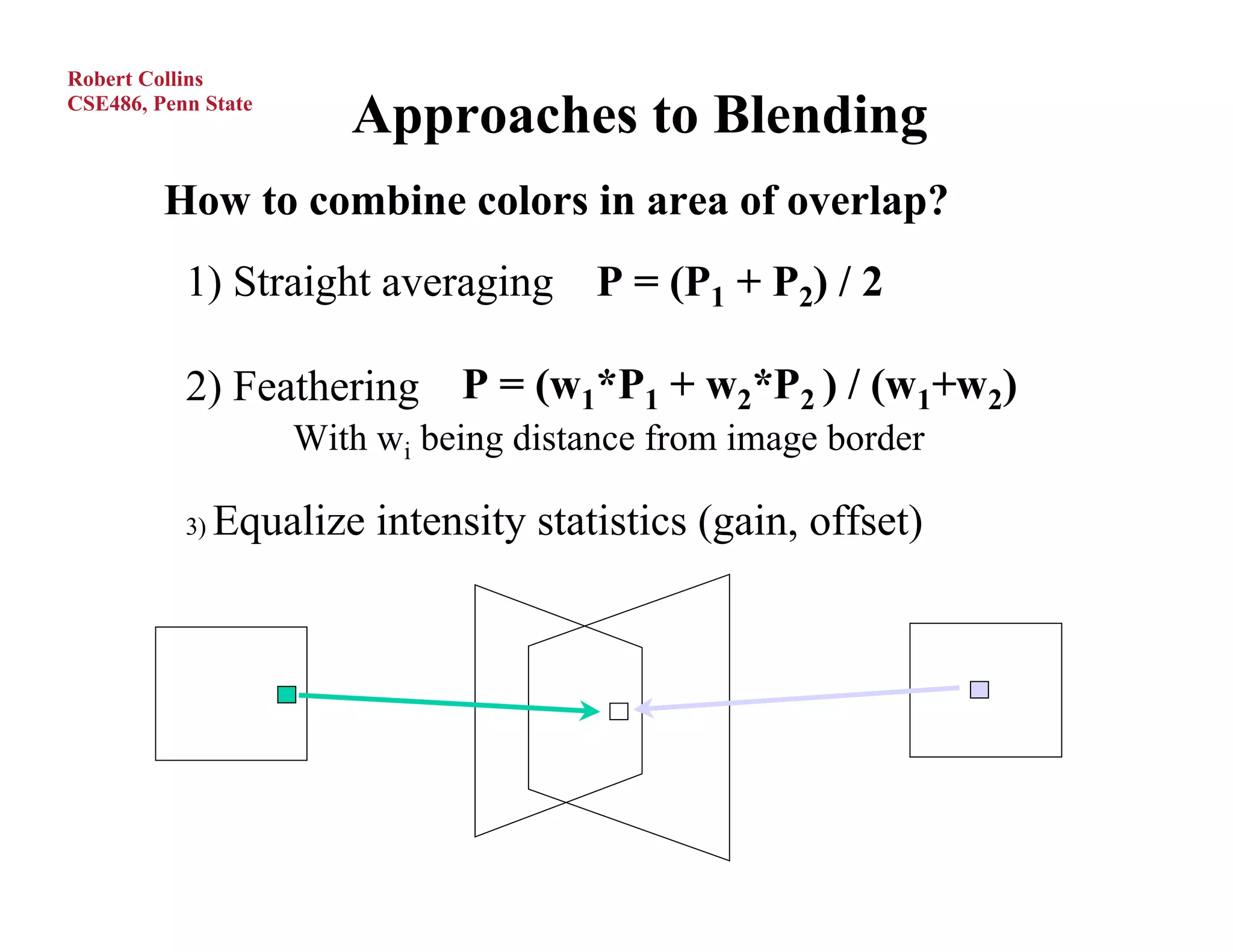
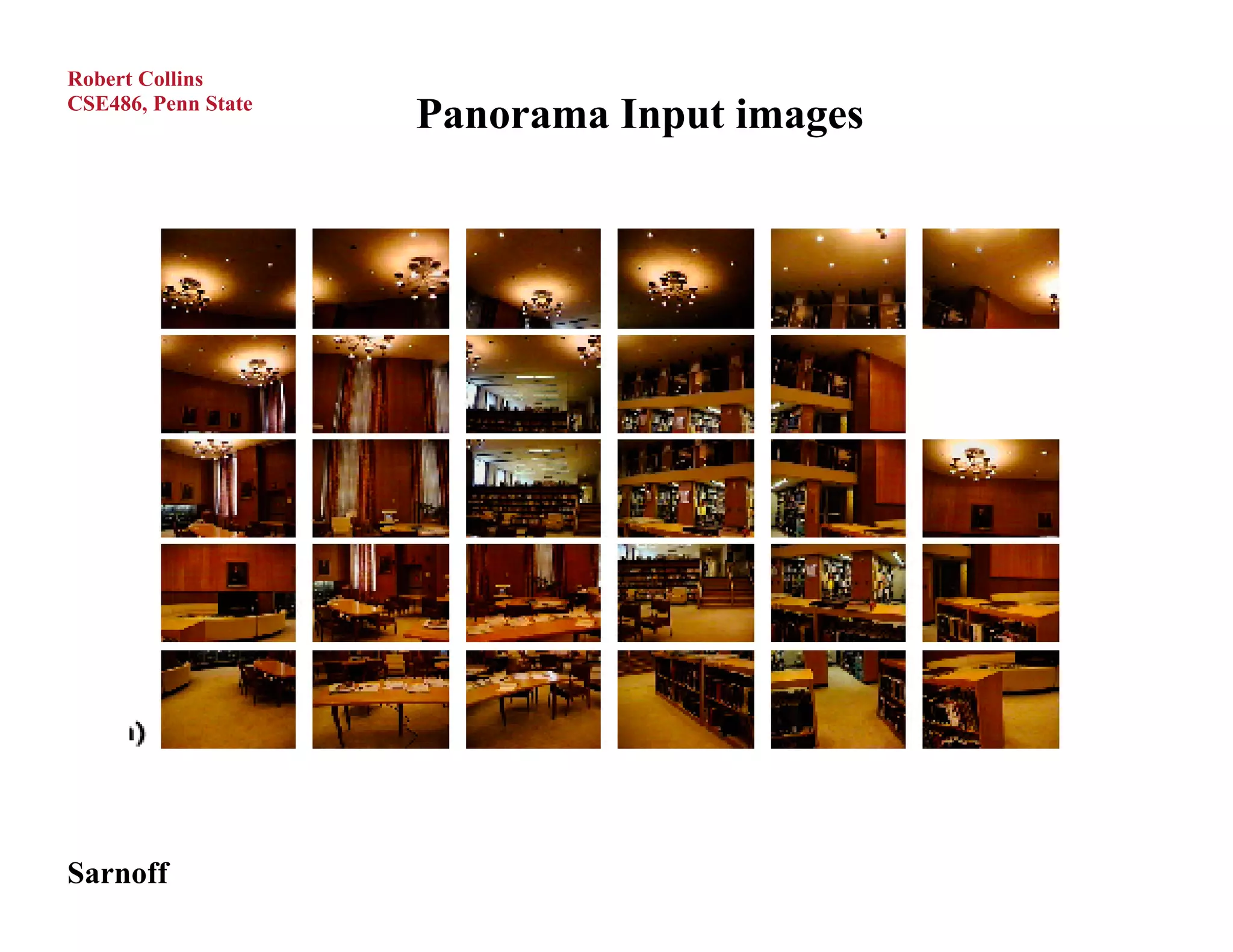
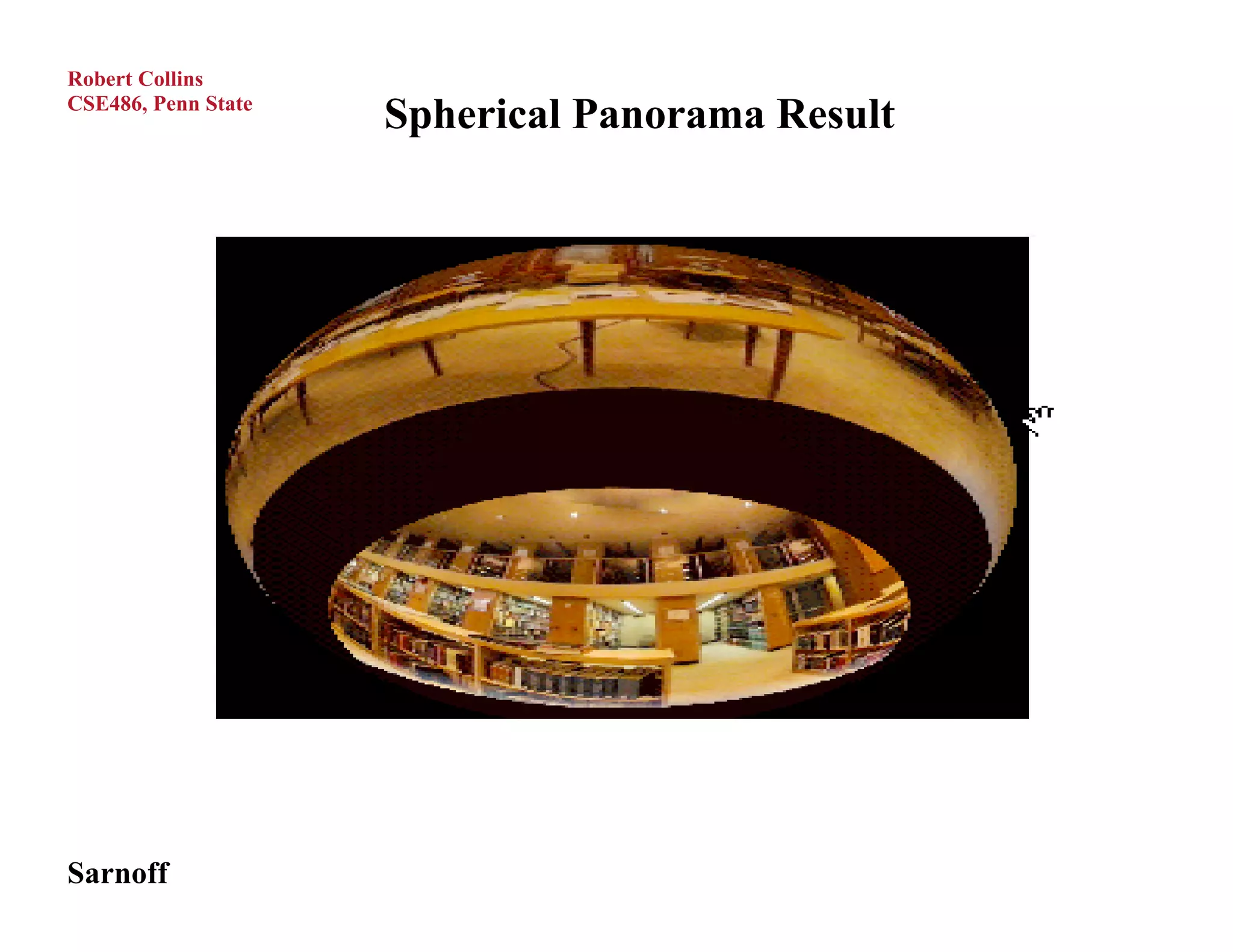
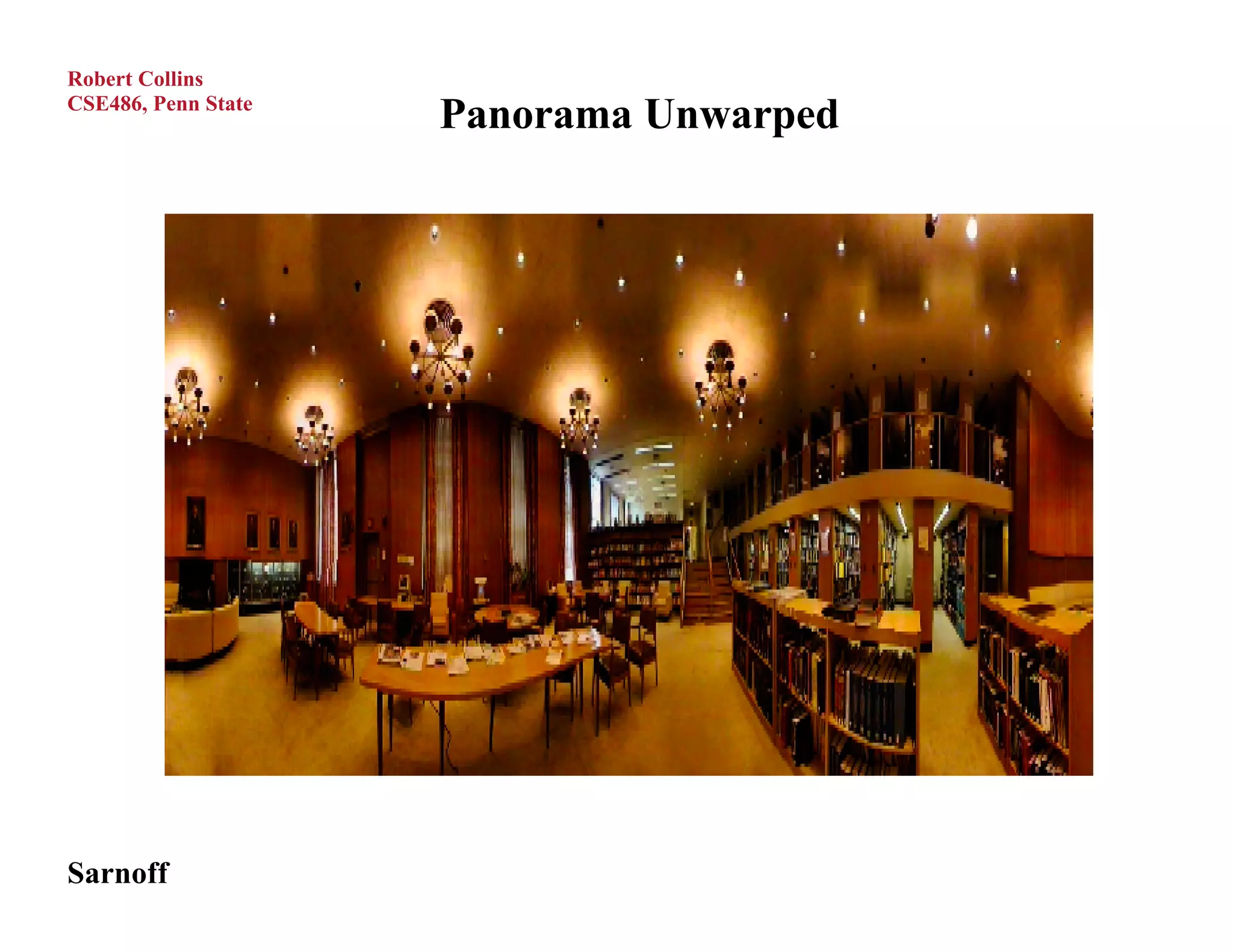
This document discusses mosaicing and stabilization techniques. It describes how to warp images into a common coordinate system to stabilize video or create mosaics. Chaining pairwise homographies allows stabilizing sequences where reference frames do not overlap. Mosaics from rotating cameras avoid ghosting since images are related by homographies. Blending is used to combine overlapping image regions. Spherical and cylindrical mosaics can be used to create panoramas by mapping images to non-planar surfaces.