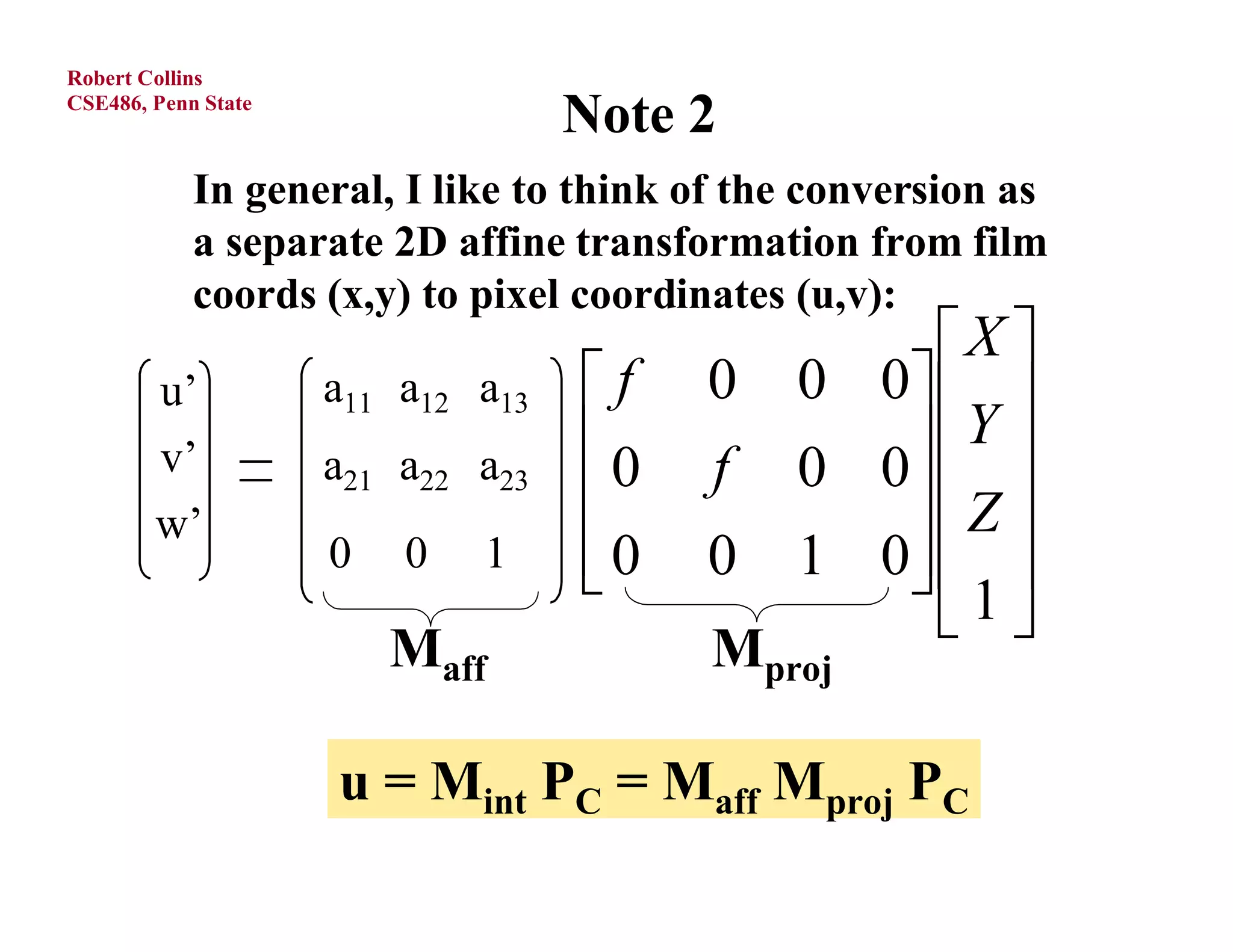
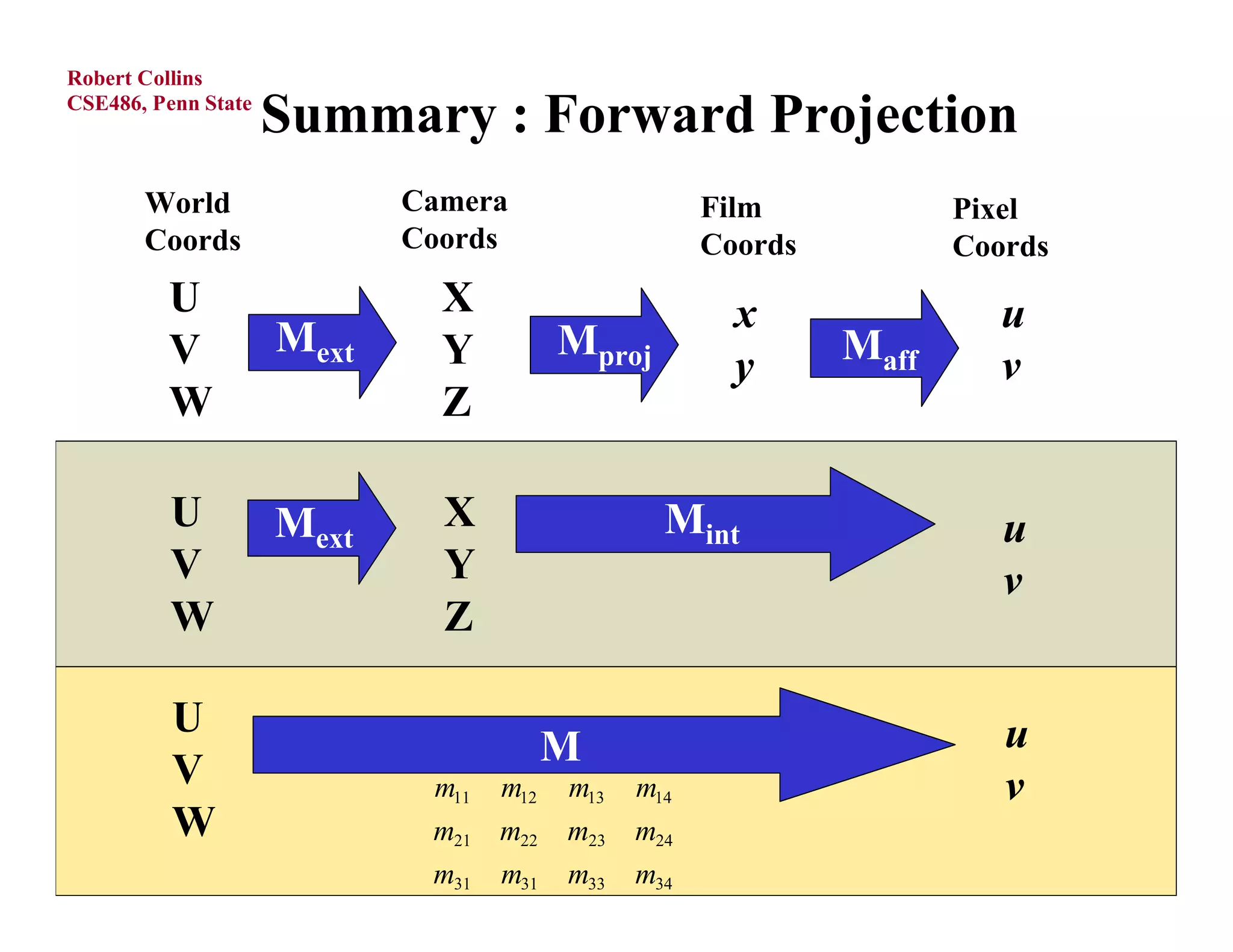
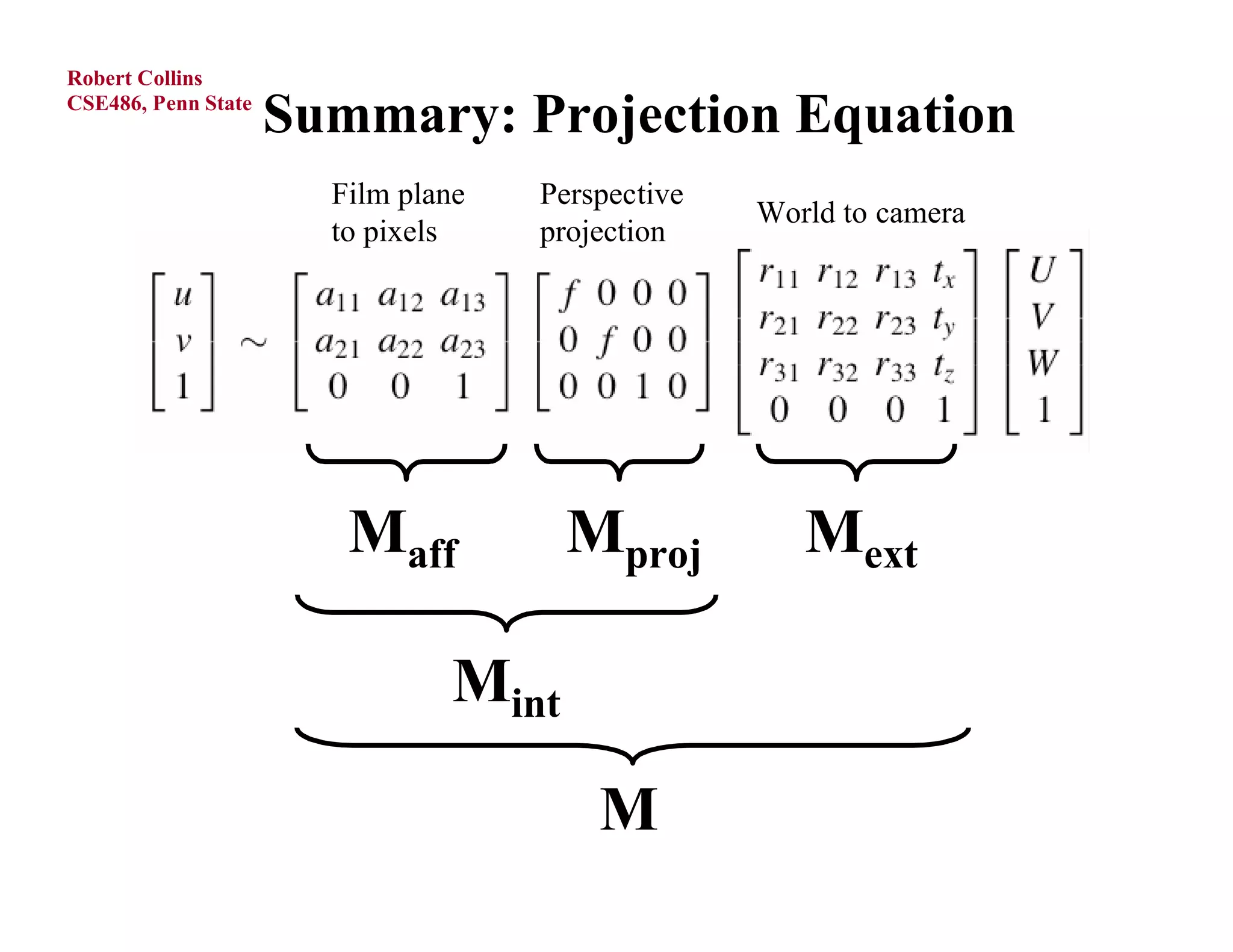
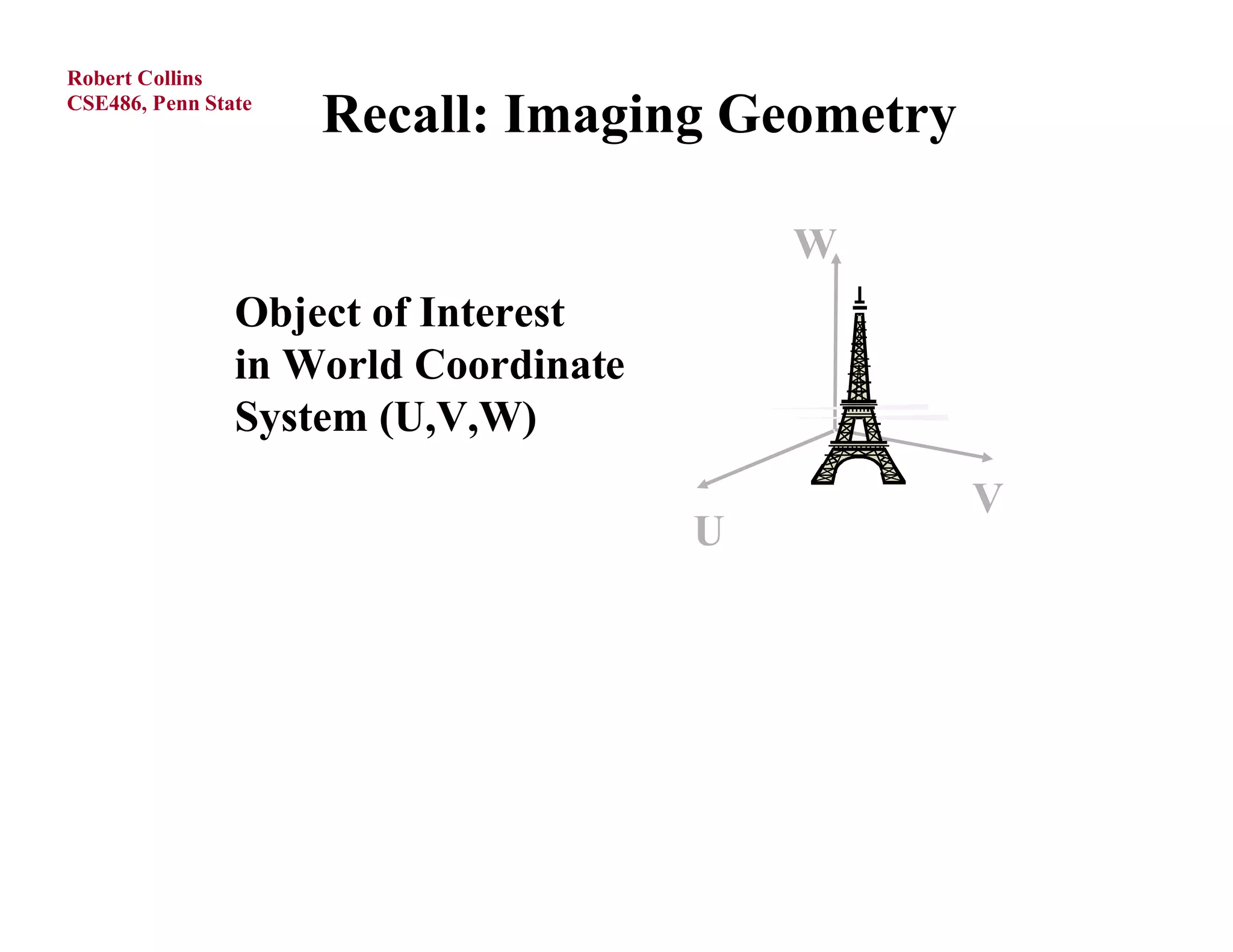
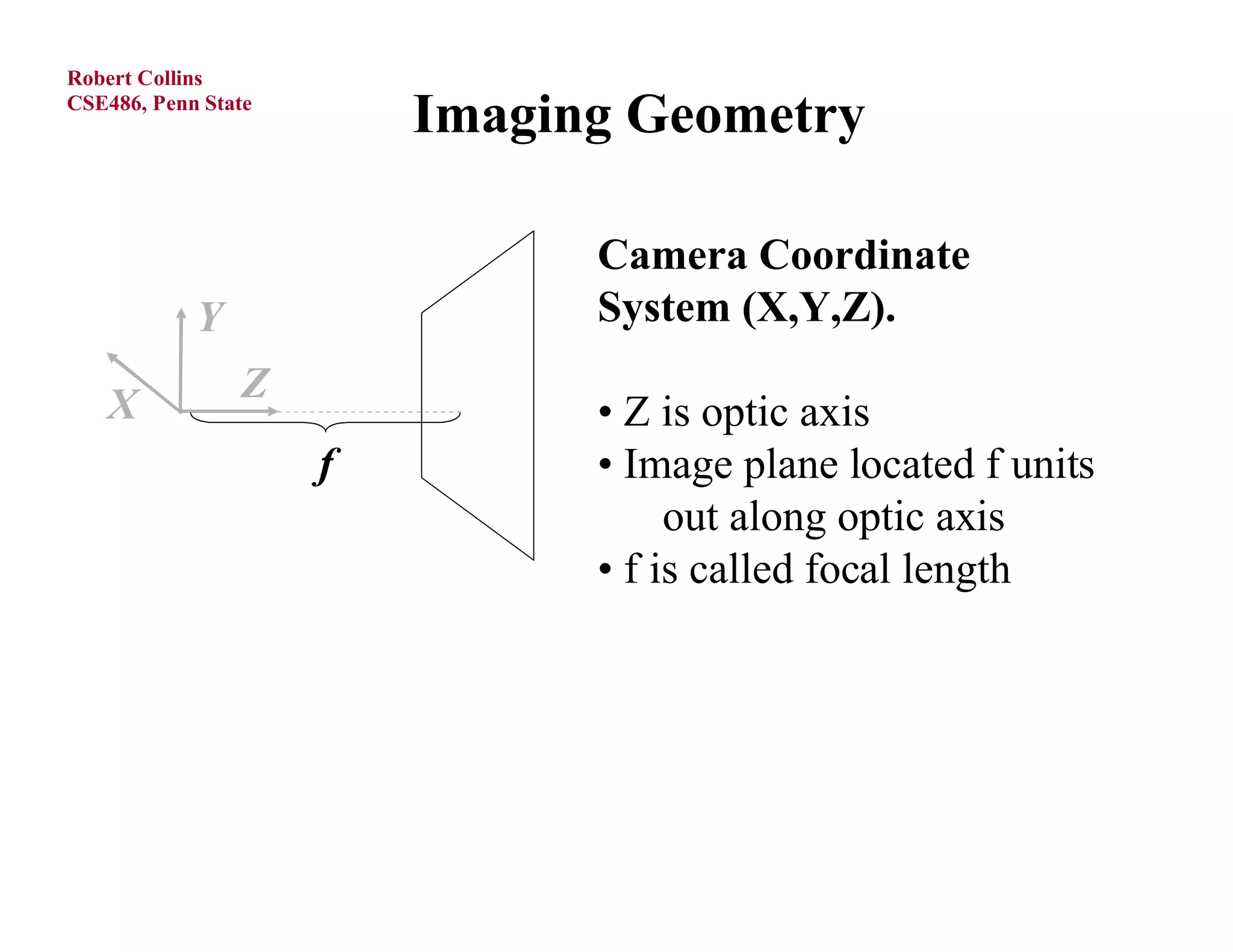
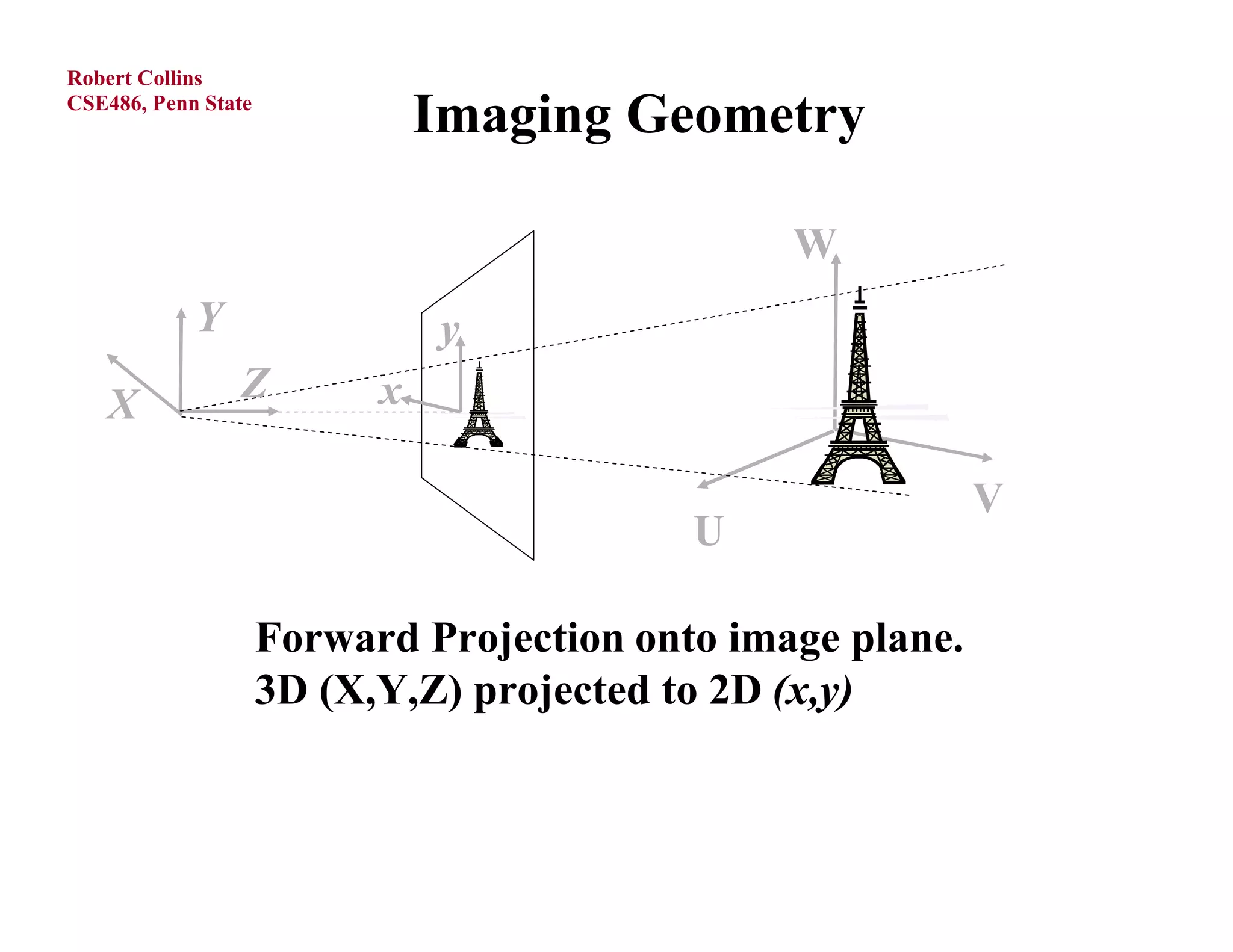
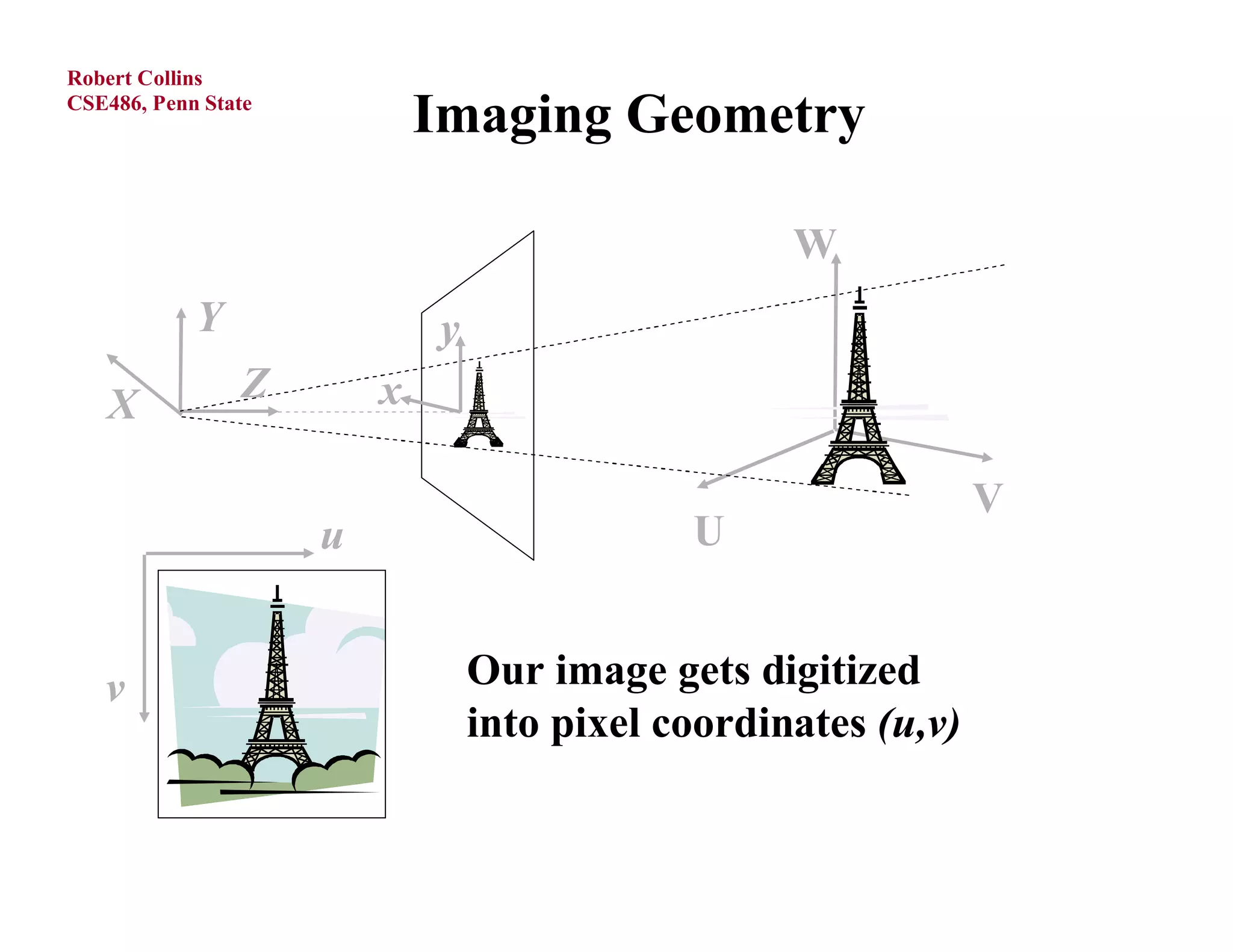
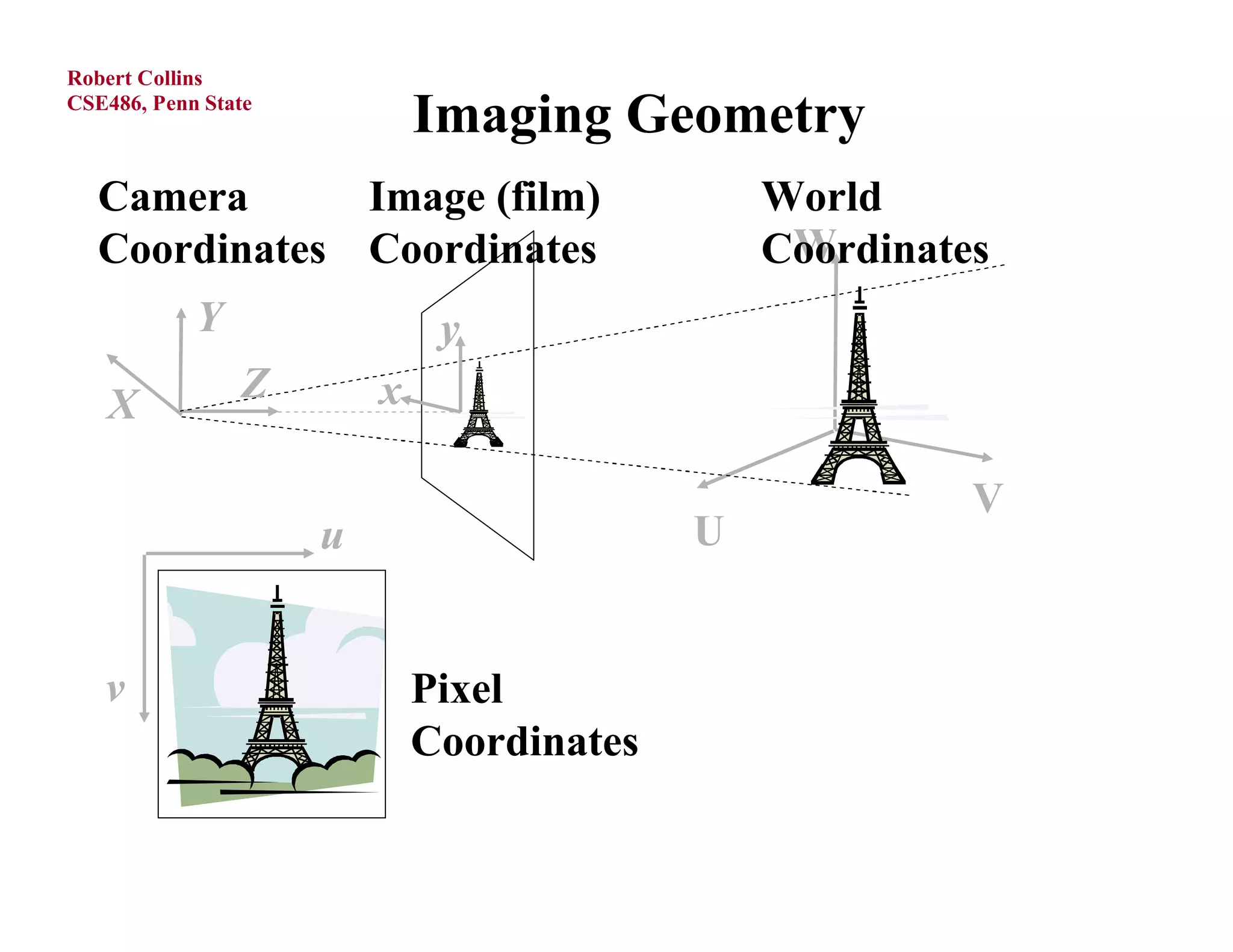
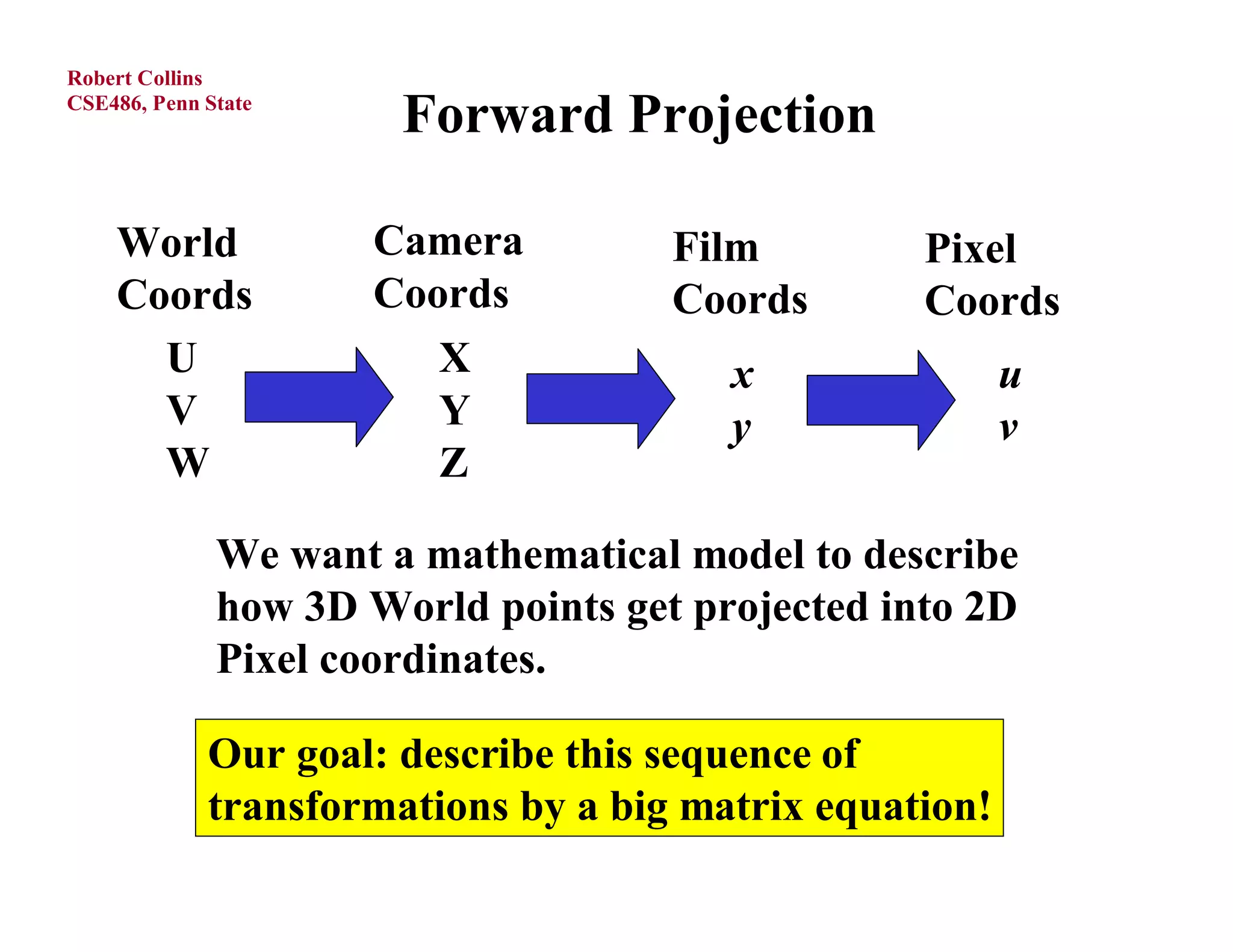
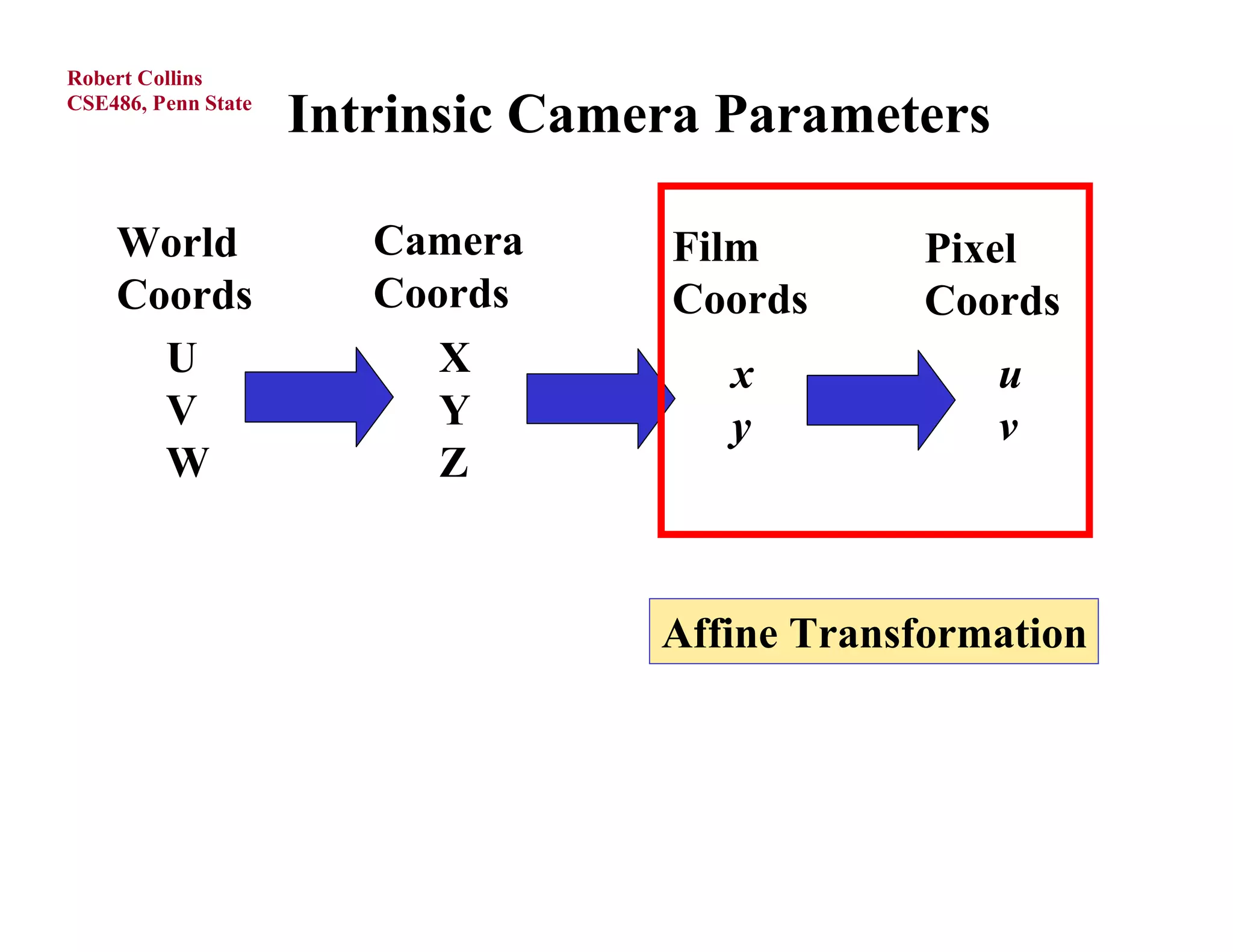
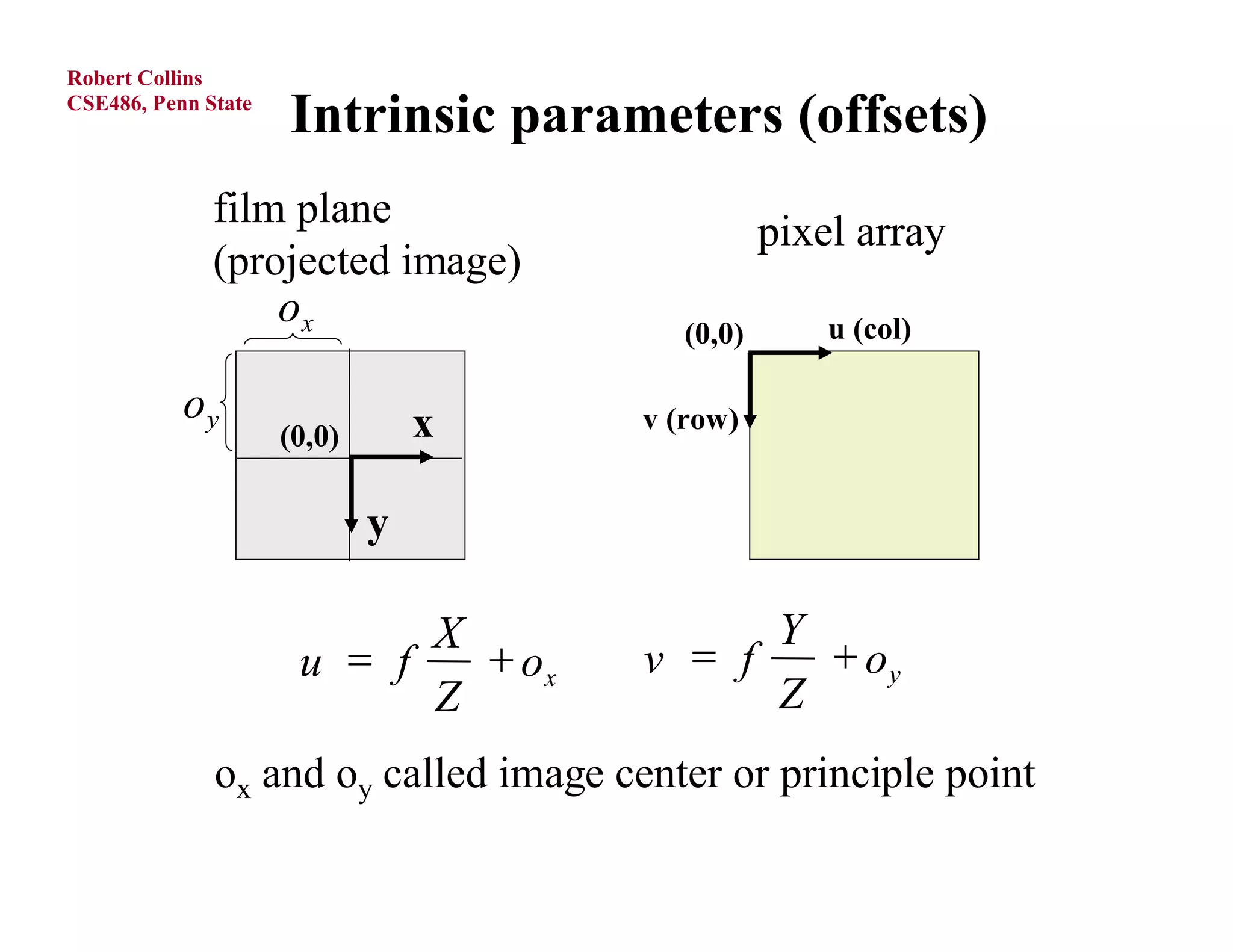
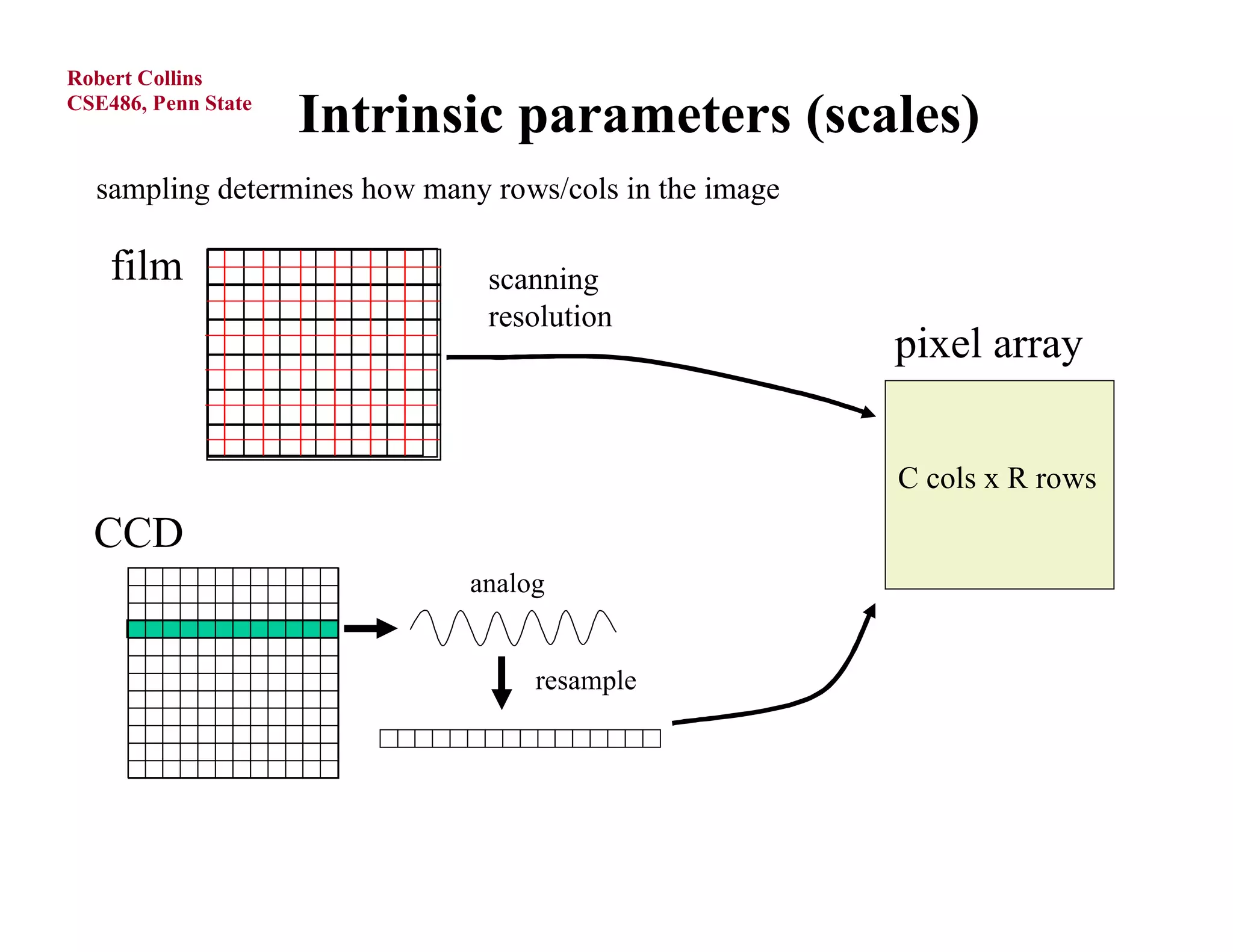
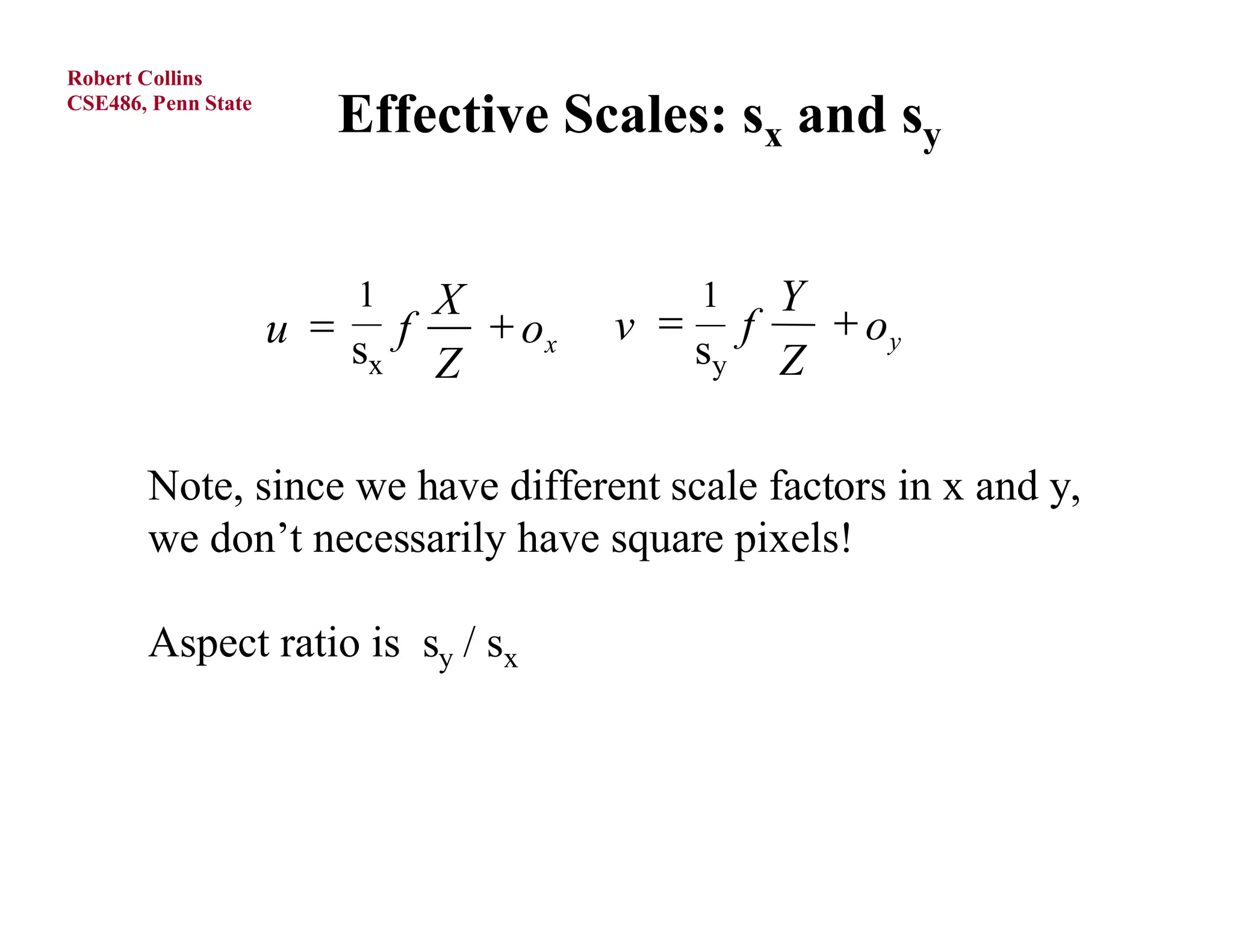
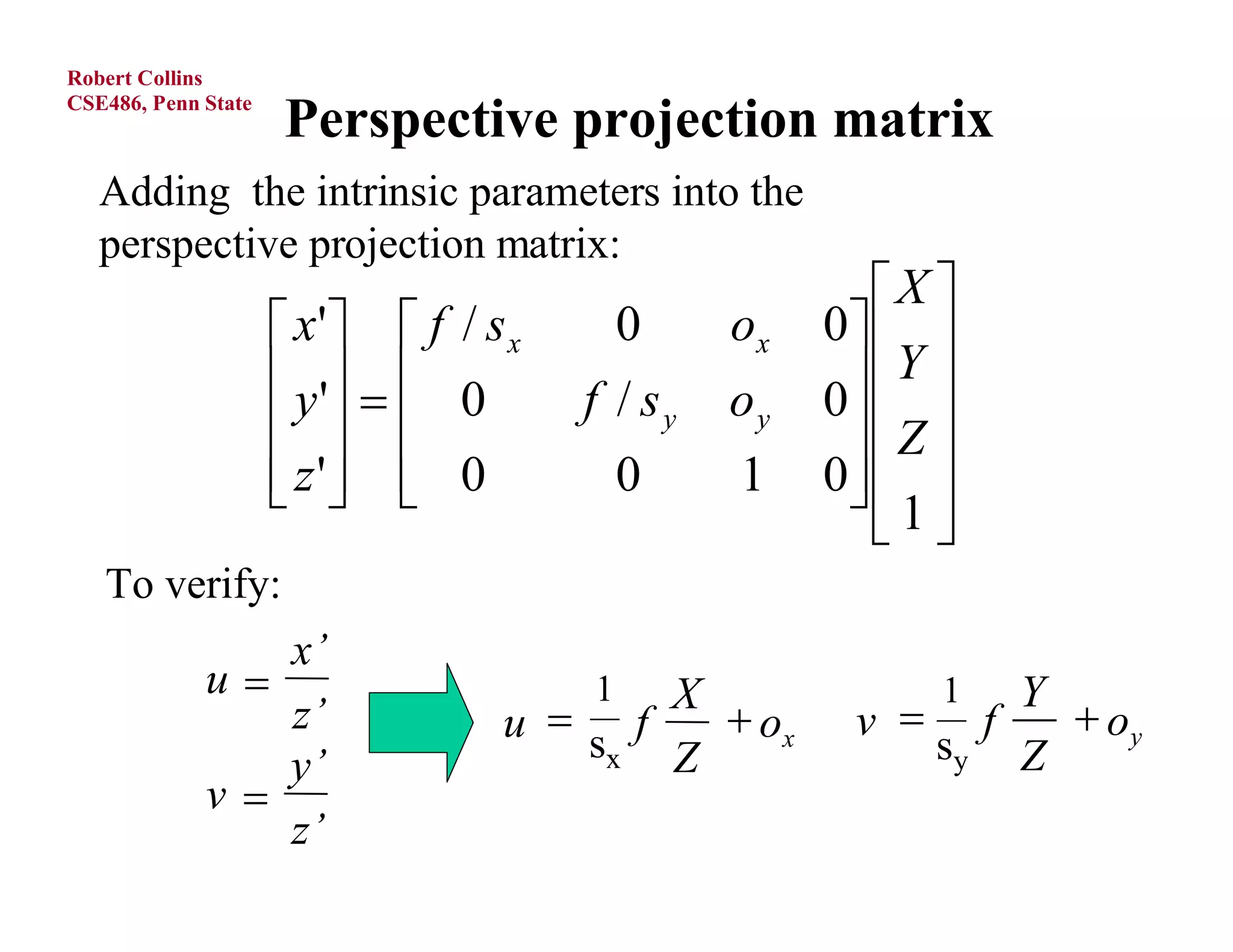
The document discusses camera projection and imaging geometry. It describes how 3D world points are projected onto a 2D image plane through a camera. This process involves multiple coordinate transformations that can be represented by matrix equations. Specifically, it involves a perspective projection from world to camera coordinates, followed by intrinsic camera calibration to map from the camera coordinate system to pixel coordinates on the image sensor.
![Robert Collins
CSE486, Penn State
Note:
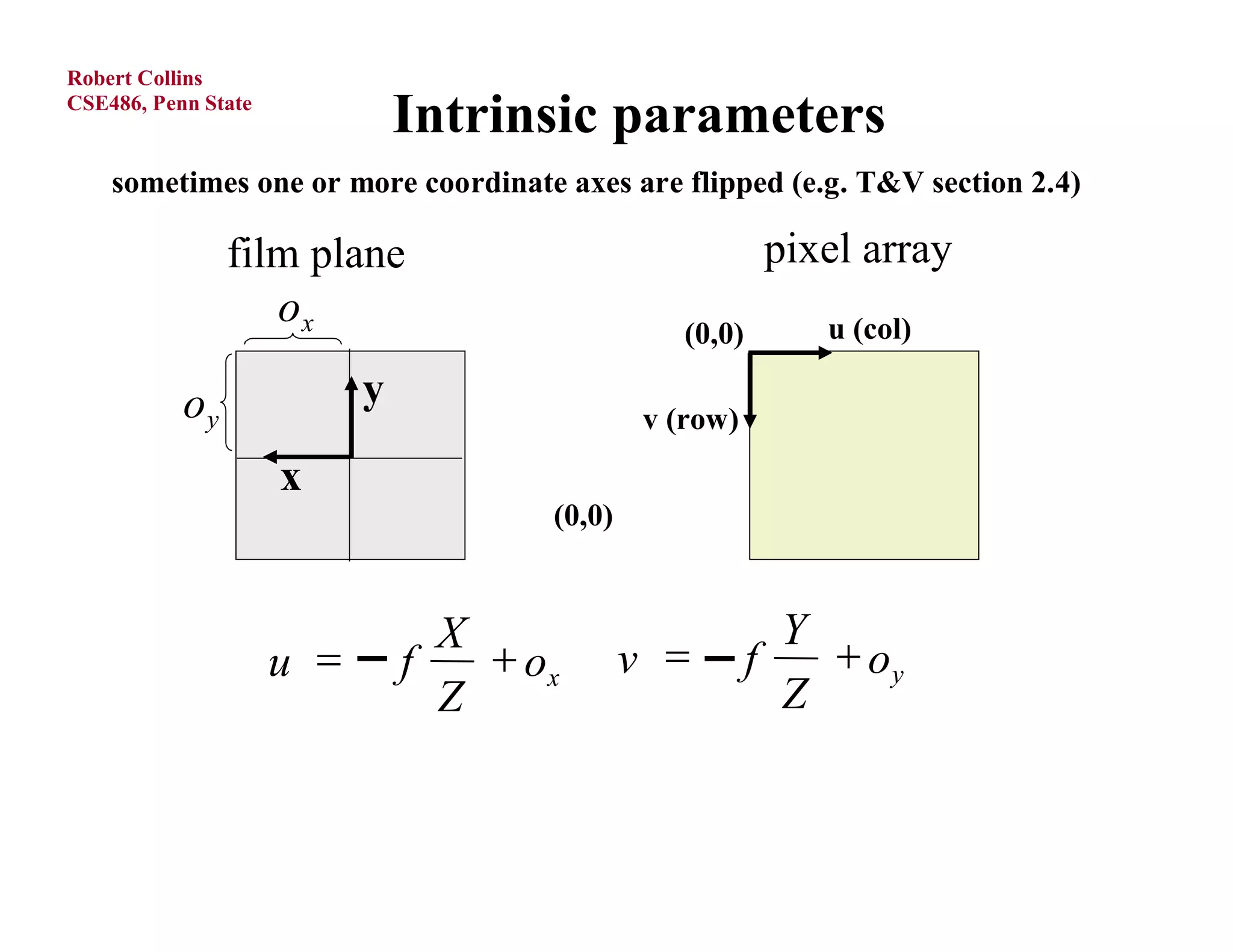
Sometimes, the image and the camera coordinate systems
have opposite orientations: [the book does it this way]
X X
f ( u o x ) s x x' f / s x 0 ox 0
Z y ' 0 f / sy oy Y
0
Y Z
f ( v o y )s y z' 0
0 1 0
1
Z ](https://image.slidesharecdn.com/lecture13-110524023521-phpapp02/75/Lecture13-15-2048.jpg)