Downloaded 537 times

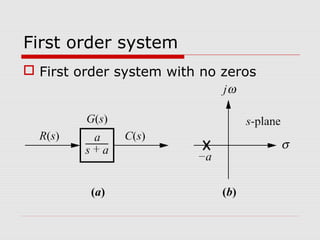
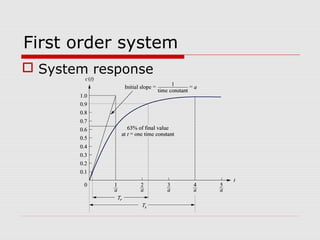
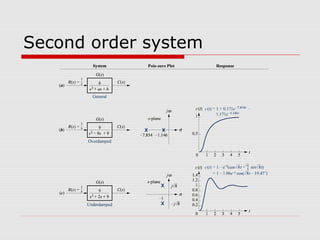
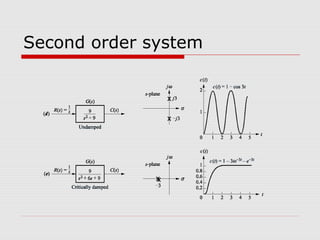
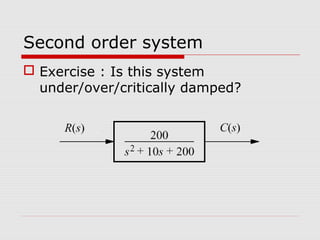
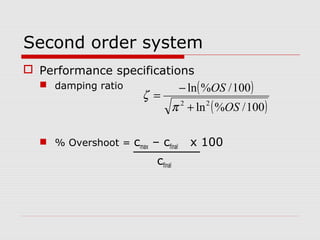
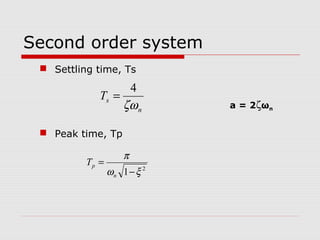
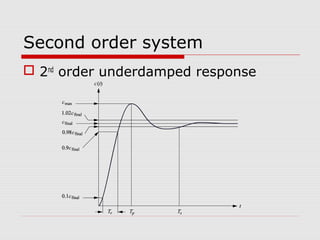
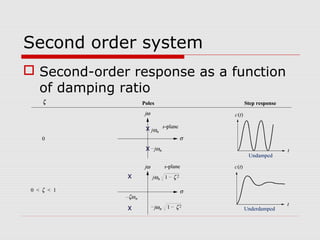
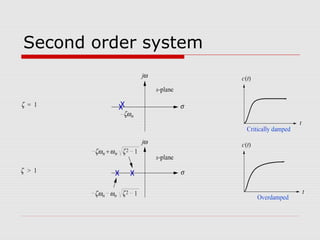
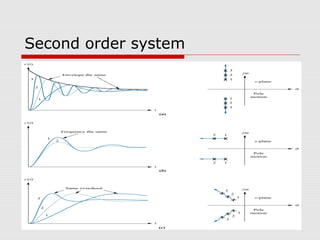
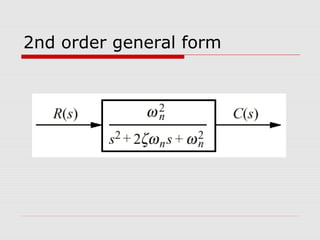
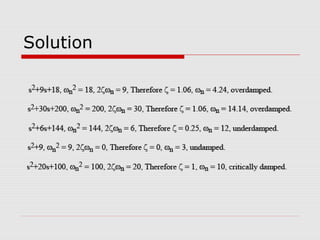
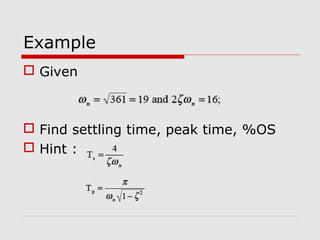
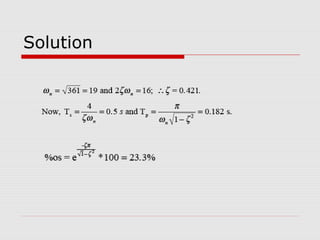
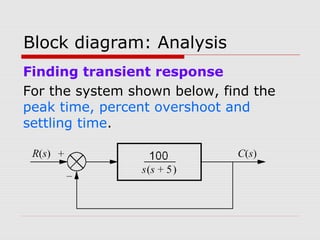

This chapter discusses transient response in control systems. It describes how to determine the time response from a transfer function using poles and zeros. For a first order system, the chapter defines the time constant, rise time and settling time. For a second order system, it defines damping ratio, percent overshoot, settling time and peak time. The chapter also discusses higher order systems and how to approximate them as second order systems. Exercises are provided to analyze systems and design feedback control systems based on desired transient response specifications.