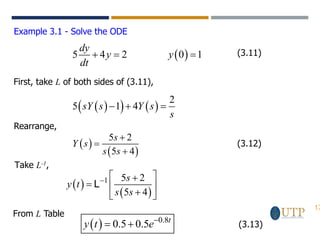
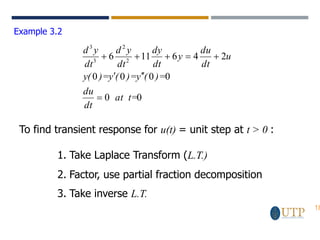
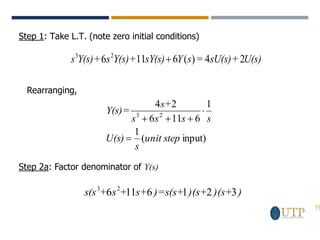
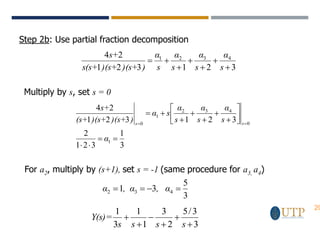
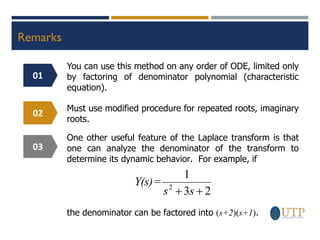
The document discusses the Laplace transform and its applications. It defines the Laplace transform and provides examples of transforms for typical functions like constants, step functions, exponentials, derivatives and trigonometric functions. It then discusses using Laplace transforms to solve differential equations by taking the transform of both sides of an equation and using properties to find the inverse transform and solution. The document also covers other Laplace transform properties like the final value theorem, initial value theorem and their applications in dynamic analysis.
![Laplace transform of representative functions
=
0
)
(
)]
(
[
)
( dt
e
t
f
=
t
f
L
s
F -st
(3.1)
where F(s) is the symbol for the Laplace transform
s is a complex independent variable
f(t) is some function of time
The Laplace transform of a function f(t) is defined as](https://image.slidesharecdn.com/chapter3-240131133801-d3fc0589/85/transformada-de-lapalace-universidaqd-ppt-para-find-eano-4-320.jpg)
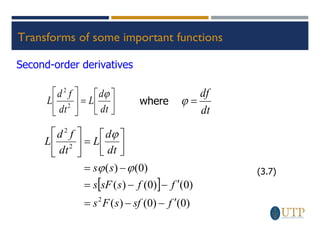
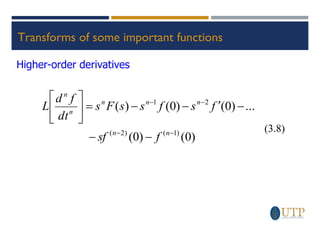
![Transforms of some important functions
Constant function: f(t) = a
s
a
s
a
e
s
a
dt
ae
=
a
L st
-st
=
−
−
=
−
=
−
0
]
[
0
0
(3.2)](https://image.slidesharecdn.com/chapter3-240131133801-d3fc0589/85/transformada-de-lapalace-universidaqd-ppt-para-find-eano-5-320.jpg)
![Transforms of some important functions
Step function
The unit step function is defined as
=
0
1
0
0
)
(
t
t
t
S (3.3)
The Laplace transform of the unit step function is
obtained with a = 1
s
t
S
L
1
)]
(
[ = (3.4)](https://image.slidesharecdn.com/chapter3-240131133801-d3fc0589/85/transformada-de-lapalace-universidaqd-ppt-para-find-eano-6-320.jpg)
![Transforms of some important functions
Exponential Functions
bt
e−
, b > 0
b
s
e
s
b
dt
e
dt
e
e
=
e
L t
s
b
t
s
b
-st
bt
bt
+
=
−
+
=
=
+
−
+
−
−
−
1
1
]
[
0
)
(
0
)
(
0
(3.5)](https://image.slidesharecdn.com/chapter3-240131133801-d3fc0589/85/transformada-de-lapalace-universidaqd-ppt-para-find-eano-7-320.jpg)
![Transforms of some important functions
Derivatives
( ) ( )
)
0
(
)
(
)
0
(
]
[
)
(
)
(
]
[
0
0
0
f
s
sF
f
f
sL
e
t
f
sdt
e
t
f
dt
e
dt
df
=
dt
df
L
st
st
-st
−
=
−
=
+
=
−
−
(3.6)
Usually define f(0) = 0](https://image.slidesharecdn.com/chapter3-240131133801-d3fc0589/85/transformada-de-lapalace-universidaqd-ppt-para-find-eano-8-320.jpg)