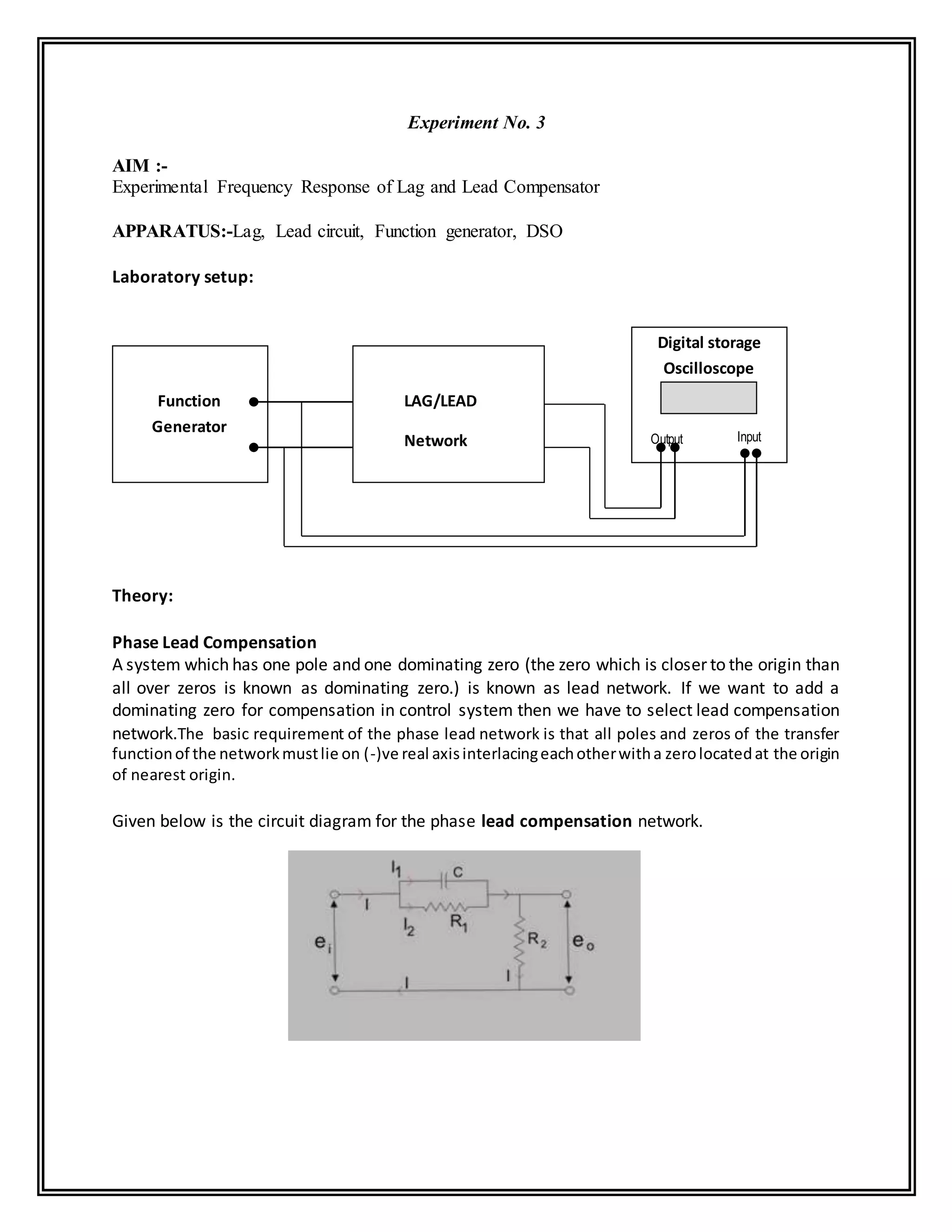
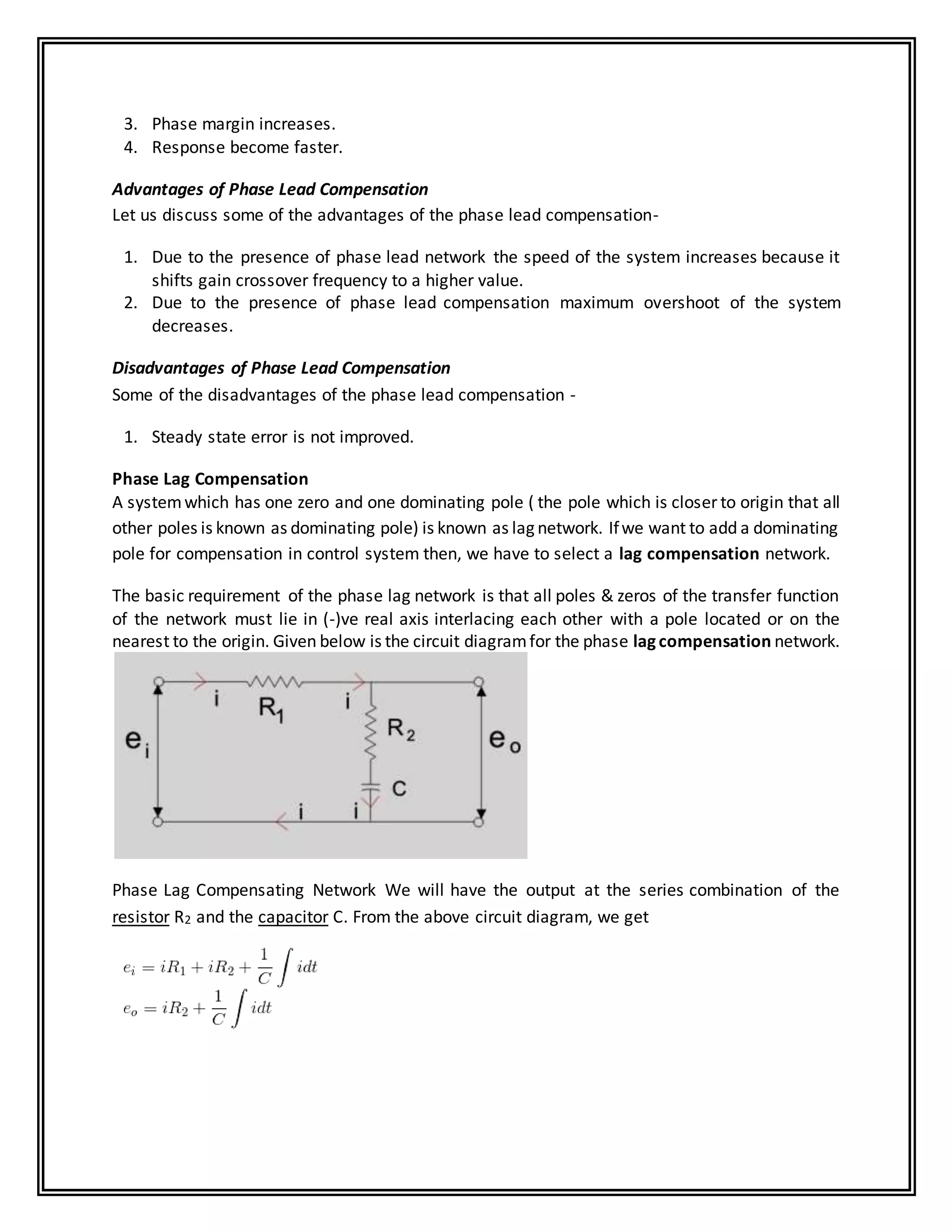
This experiment aims to study the frequency response of lag and lead compensators. A lag compensator circuit contains resistors and capacitors, while a lead compensator contains resistors and an inductor. These compensator circuits are connected to a function generator and digital storage oscilloscope. The transfer functions of the lag and lead compensators are derived. For the lead compensator, the pole-zero plot is drawn to show that the zero is closer to the origin than the pole, introducing positive phase angle. By measuring the output waveforms on the oscilloscope for different compensator circuits, the effect of lag and lead compensation on the frequency response is observed experimentally.
![The Voltage equation of the motor is given by
Va = Eb + Ia Ra + La dIa / dt, taking Laplace transform on both sides,
Va(s) = Eb(s)+ Ia ( Ra+ s La)
Ia(s) = (Va - Eb(s) / ( Ra+ s La)……………………………….(1)
Electromagnetic torque developed is given by;
Te α φ. Ia
Te = Kt. Ia……………………… since φ is constant
Or Tm(s) = Kt. Ia(s)……………………………………….(2)
But the motor torque developed has to satisfy following equation
Tm = J.d2θ /dt2 + f. d θ /dt + TL
Or Te(s) = [ J s2 + f(s) ] θ(s)………………………………..(3)
Equating (2) and (3), we get,
Kt. Ia(s) = [ J s2 + fs ] θ(s)
Kt [ (Va - Eb(s) / (Va - Eb(s) ] = = [ J s2 + fs ] θ(s)…….(4)
But the back emf is proportional to motor speed ,
Eb α Kb . d θ /dt .
Eb = Kb. d θ /dt
where, Kb is back emf constant and expressed as volts / rad. / sec
Or Eb(s) = s.Kb. θ(s)…………………………………………(5)
Sub. (5) in (4 ) and simplification yields,
G(s) =)θ(s) / Va(s) = Kt / ( J s2 + fs ) ( Ra+ s La) s. Kt. Kb ……(6)
Equ. (6) is the required transfer function of](https://image.slidesharecdn.com/labmanual-200824171921/75/Lab-manual-3-2048.jpg)


![Experiment No. 4
AIM :- To study simulation of PID Controller using Matlab.
APPARATUS:-
THEORY:- Controller is a device which when introduced in feedback or forward path of system
controller, the steady state and transient part of device converts the input to the controller to
some otherformthan proportional toerror.Due towhichthe steadystate andtransientresponse
gets improved. In most of the practical systems, controllers input is proportional to error
generated, such systems are called as ‘Proportional error constants.’ To improve the transient
response PID controllers are introduced.
The different types of controllers are:
1) PD – Proportional + Derivative
2) PI – Proportional + Integral
3) PID – Proportional + Integral + Derivative
1) PD Controller- Thisisthe controllerinforwardpath whichchangesthe controllerinputtoPD
of error signal.
Input to controller = 𝑲 𝒑 𝒆( 𝒕) + 𝑲 𝒅
𝒅𝒆(𝒕)
𝒅𝒕
Taking Laplace, we get
Input = KpE(s) + S Kd E(s)
= E(s) [Kp + S Kd]
It has following effect on the system response.
Increases damping ratio
ωn remains unchanged
Reduces peak overshoot
Reduces settling time
In general it improves the transient part and not the steady state part. The type of
the system and steady state error remains unchanged.
2) PI Controller- This is the controller in forward path which changes the controller input to PI
of error signal.
Input to controller = 𝑲 𝒑 𝒆( 𝒕) + 𝑲𝒊 ∫ 𝒆( 𝒕) 𝒅𝒕
Taking Laplace, we get
Input = KpE(s) + S Ki
𝑬(𝒔)
𝒔
= E(s) [ Kp +
𝑲 𝒊
𝑺
]](https://image.slidesharecdn.com/labmanual-200824171921/75/Lab-manual-19-2048.jpg)
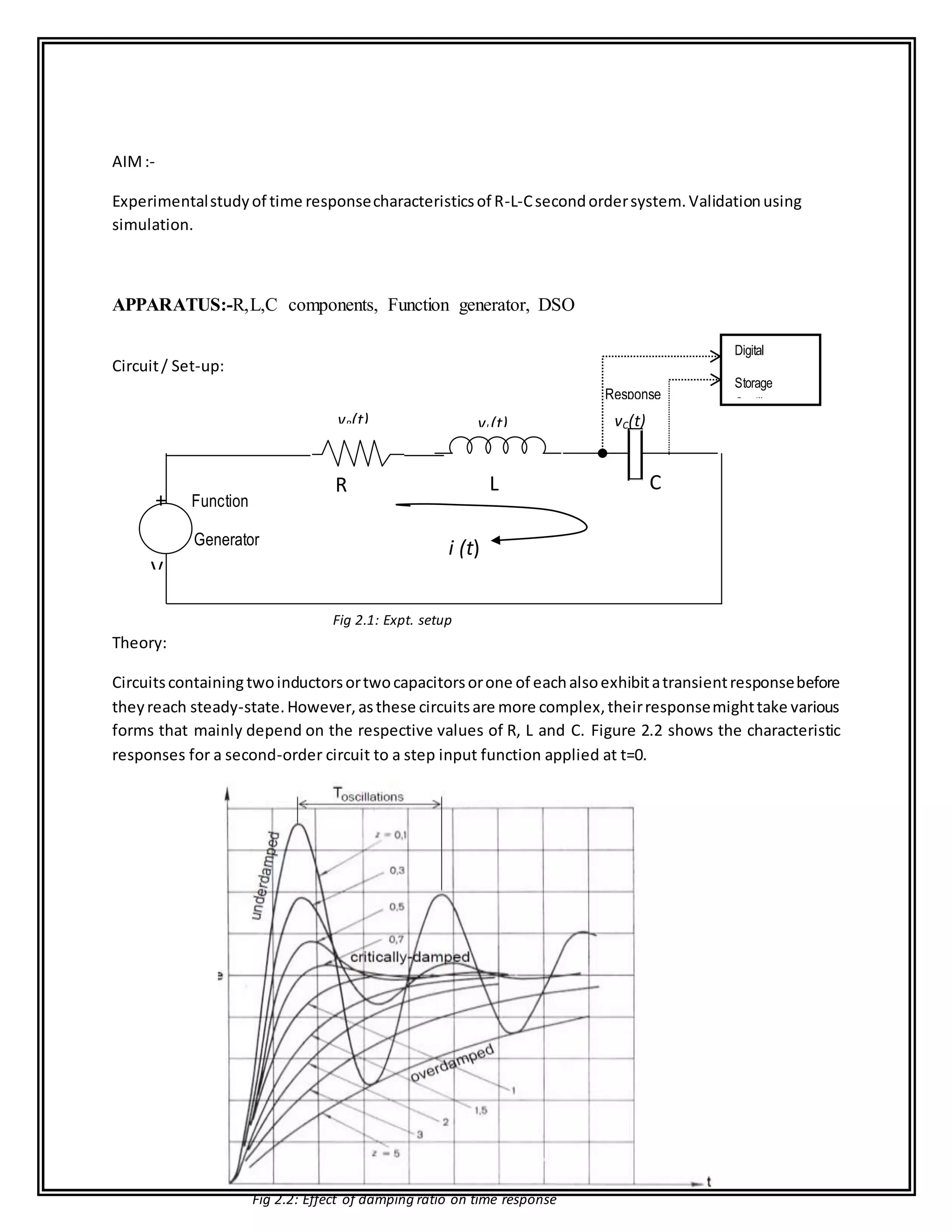
![Open-loop step response: Let's first view the open-loopstep response.
num=1;
den=[1 10 20];
plant=tf(num,den);
step(plant)
MATLAB command window should give you the plot shown below.
The DC gain of the plant transfer function is 1/20, so 0.05 is the final value of the output to a unit
step input. This corresponds to the steady-state error of 0.95, quite large indeed.Furthermore, the
rise time is about one second, and the settling time is about 1.5 seconds. Let's design a controller
that will reduce the rise time, reduce the settling time,and eliminates the steady-state error.
Proportional control:
The closed-looptransfer function of the above system with a proportional controller is:](https://image.slidesharecdn.com/labmanual-200824171921/75/Lab-manual-21-2048.jpg)
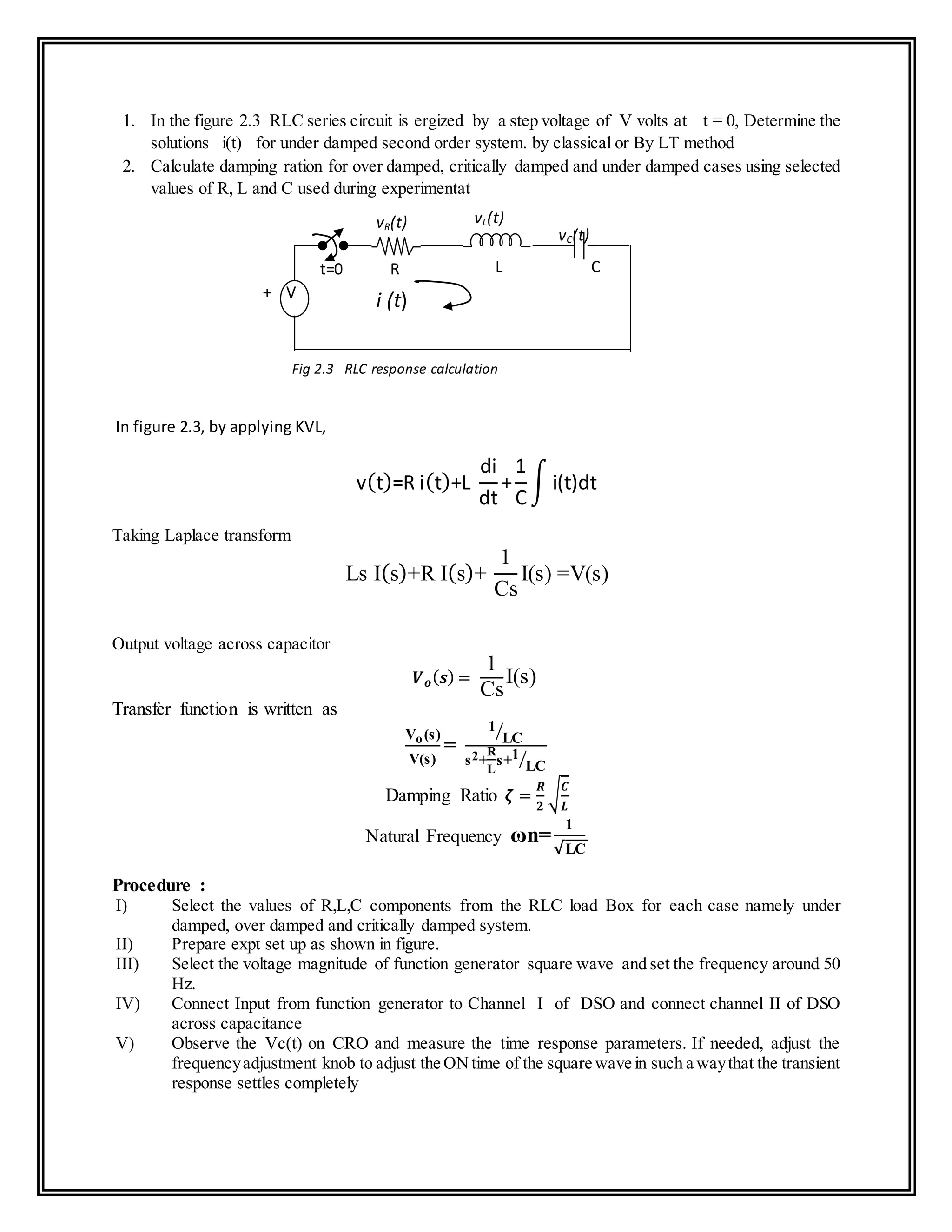
![Let the proportional gain (KP) equal 300:
Kp=300;
contr=Kp;
sys_cl=feedback(contr*plant,1);
t=0:0.01:2;
step(sys_cl,t)
The above plot shows that the proportional controller reduced both the rise time and the steady-
state error, increased the overshoot, and decreased the settling time by small amount.
Proportional-Derivative control:
The closed-looptransfer function of the given system with a PD controller is:
Let KP equal 300 as before and let KD equal 10.
Kp=300;
Kd=10;
contr=tf([Kd Kp],1);
sys_cl=feedback(contr*plant,1);
t=0:0.01:2;](https://image.slidesharecdn.com/labmanual-200824171921/75/Lab-manual-22-2048.jpg)
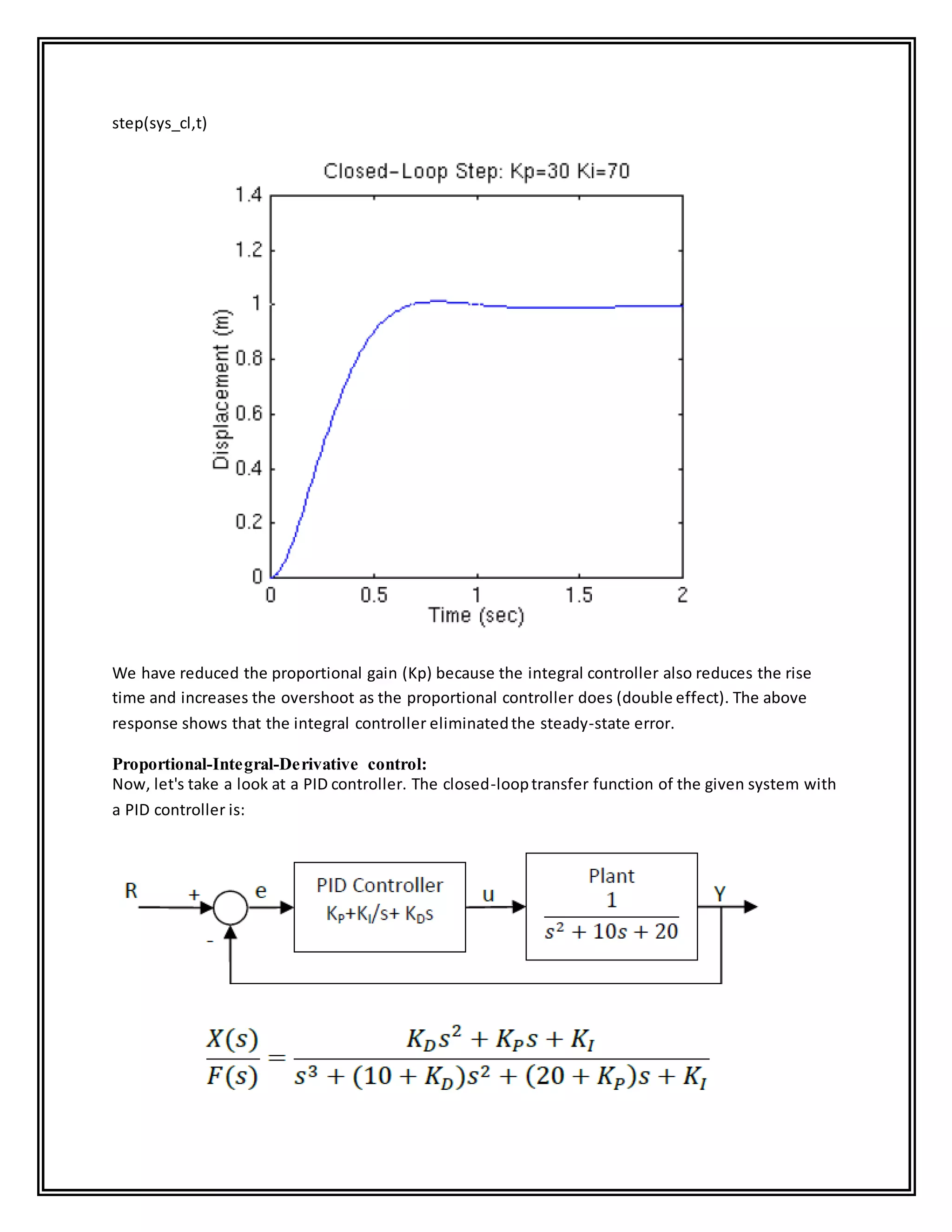
![step(sys_cl,t)
This plot shows that the derivative controller reduced both the overshoot and the settling time, and
had a small effect on the rise time and the steady-state error.
Proportional-Integral control:
Before going into a PID control, let's take a look at a PI control. For the givensystem, the closed-
loop transfer function with a PI control is:
Let's reduce the KP to 30, and let KI equal 70.
Kp=30;
Ki=70;
contr=tf([Kp Ki],[1 0]);
sys_cl=feedback(contr*plant,1);
t=0:0.01:2;](https://image.slidesharecdn.com/labmanual-200824171921/75/Lab-manual-23-2048.jpg)
![After several trial and error runs, the gains Kp=350, Ki=300, and Kd=50 provided the desired
response. To confirm, enter the following commands to an m-file and run it in the command window.
You should get the following step response.
Kp=350;
Ki=300;
Kd=50;
contr=tf([Kd Kp Ki],[1 0]);
sys_cl=feedback(contr*plant,1);
t=0:0.01:2;
step(sys_cl,t)
Now, we have obtained a closed-loop system with no overshoot, fast rise time, and no steady-state
error.
The characteristics of P, I, and D controllers:
The proportional controller (KP) will have the effect of reducing the rise time and will reduce, but
never eliminate, the steady state error. An integral controller (KI) will have the effect of eliminating
the steady state error, but it may make the transient response worse. A derivative control (KD) will
have the effect of increasing the stability of the system, reducing the overshoot and improving the
transient response.
Effect of each controller KP,KI and KD on the closed-loop system are summarized below](https://image.slidesharecdn.com/labmanual-200824171921/75/Lab-manual-25-2048.jpg)


![Reduction of multiple subsystem [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/reductionofmultiplesubsystemcompatibilitymode-110418075355-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
































































