Downloaded 74 times

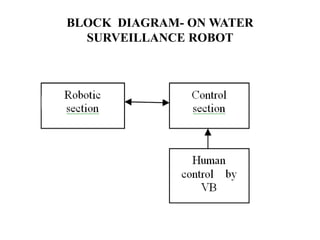
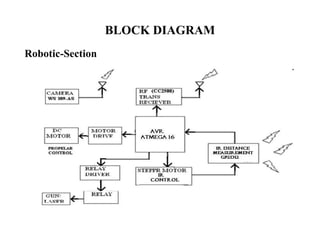
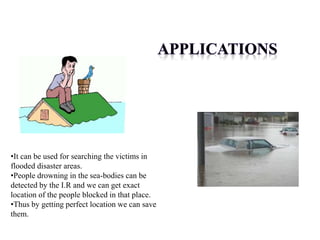



This document describes a proposed water surveillance robot. The robotic section would contain a boat with propellers driven by DC motors to allow for movement, an ultrasonic sensor to measure distance to intruders, and a laser gun that could be activated to stop intruders. The control section would allow an operator to control the boat's movement and laser gun through a wireless RF connection to the robotic section. The robot is intended to allow single-handed monitoring of water areas and to potentially help search for and rescue victims in flooded areas.