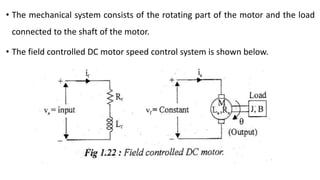
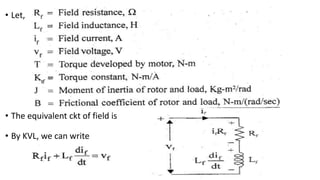
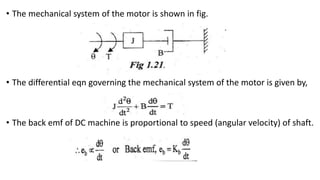
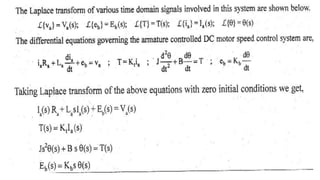
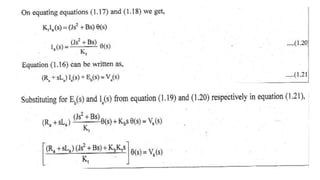
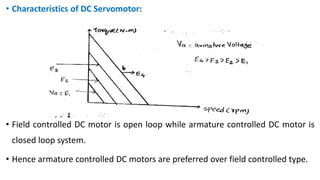
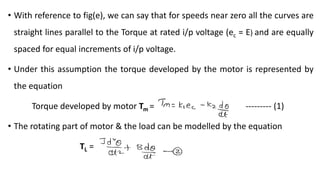
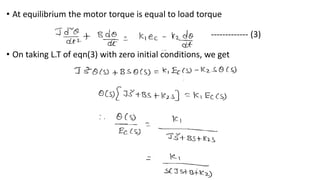
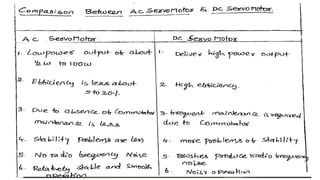
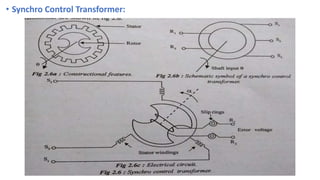
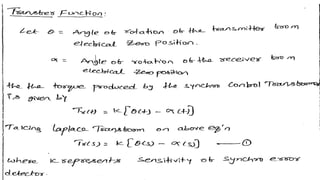
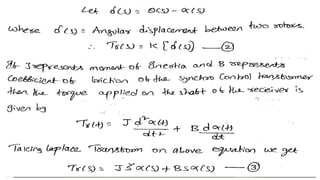
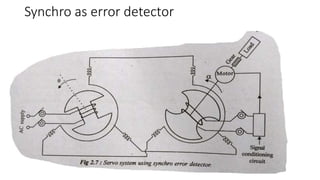
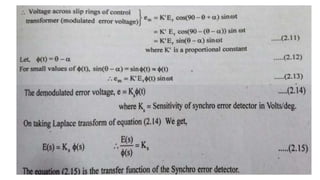
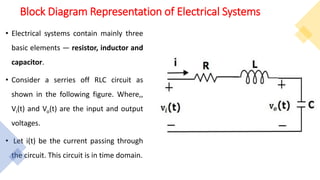
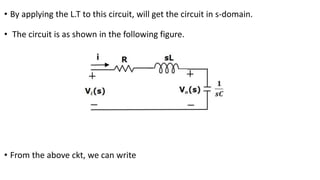
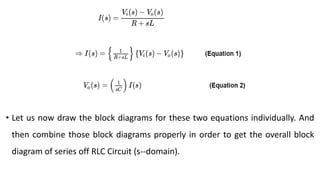
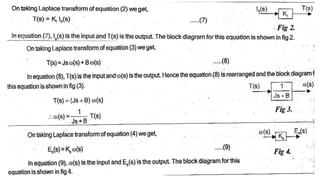
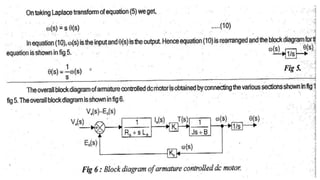
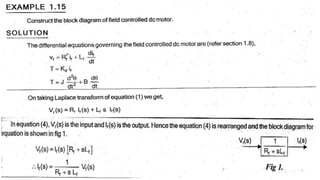
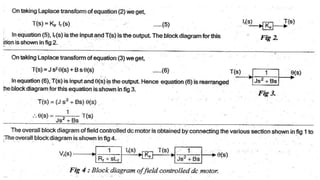
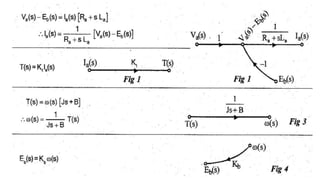
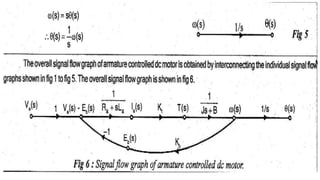
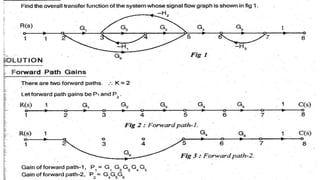
The document discusses transfer function representation of DC and AC servomotors. It provides details on the construction, working principle, and transfer function modeling of field controlled and armature controlled DC servomotors. It also discusses AC servomotor construction, torque-speed characteristics, and transfer function. Finally, it covers synchro transmitters and receivers, their working principles, and applications in angular position control from a remote location.