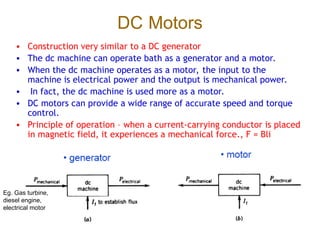
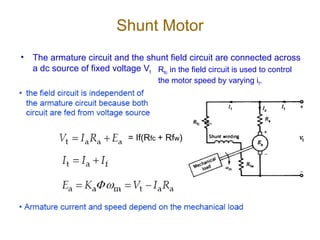
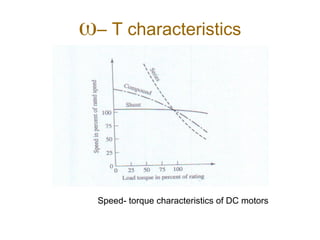
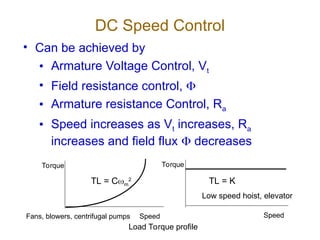
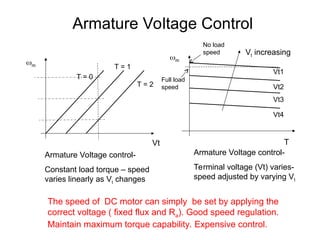
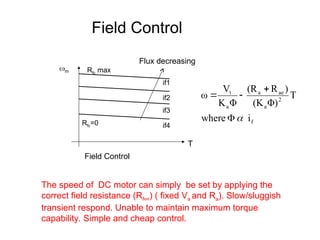
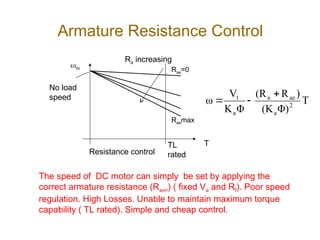
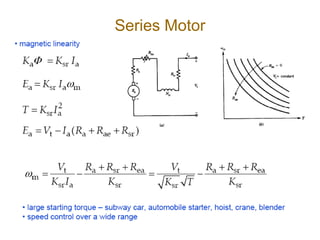
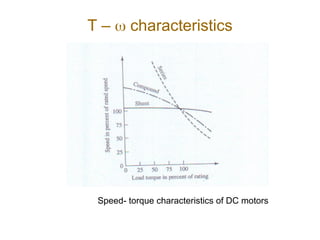
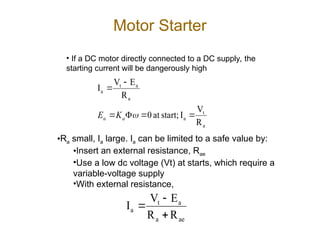
DC motors operate similarly to DC generators and can function both as motors and generators, primarily used as motors for mechanical power output. There are various types of DC motors (shunt, series, and compound) that offer different speed and torque characteristics, with applications ranging from pumps to electric trains. Speed control in DC motors can be achieved through methods like armature voltage control, field resistance control, and the use of advanced systems such as solid-state converters.