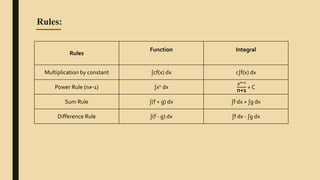
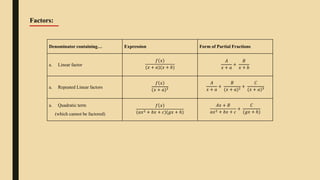
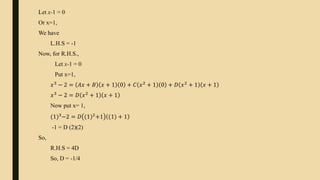
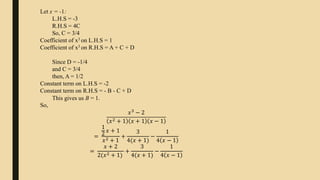
The document provides an overview of calculus and analytical geometry presented by Group D. It discusses various topics related to integration including the history and development of integration, the definition and purpose of integration, common integration rules and formulas like integration by parts and integration by partial fractions, and real-life applications of integration in fields like engineering, medicine, and physics. Examples are provided to demonstrate how to use integration techniques like integration by parts and integration by partial fractions to evaluate definite integrals.