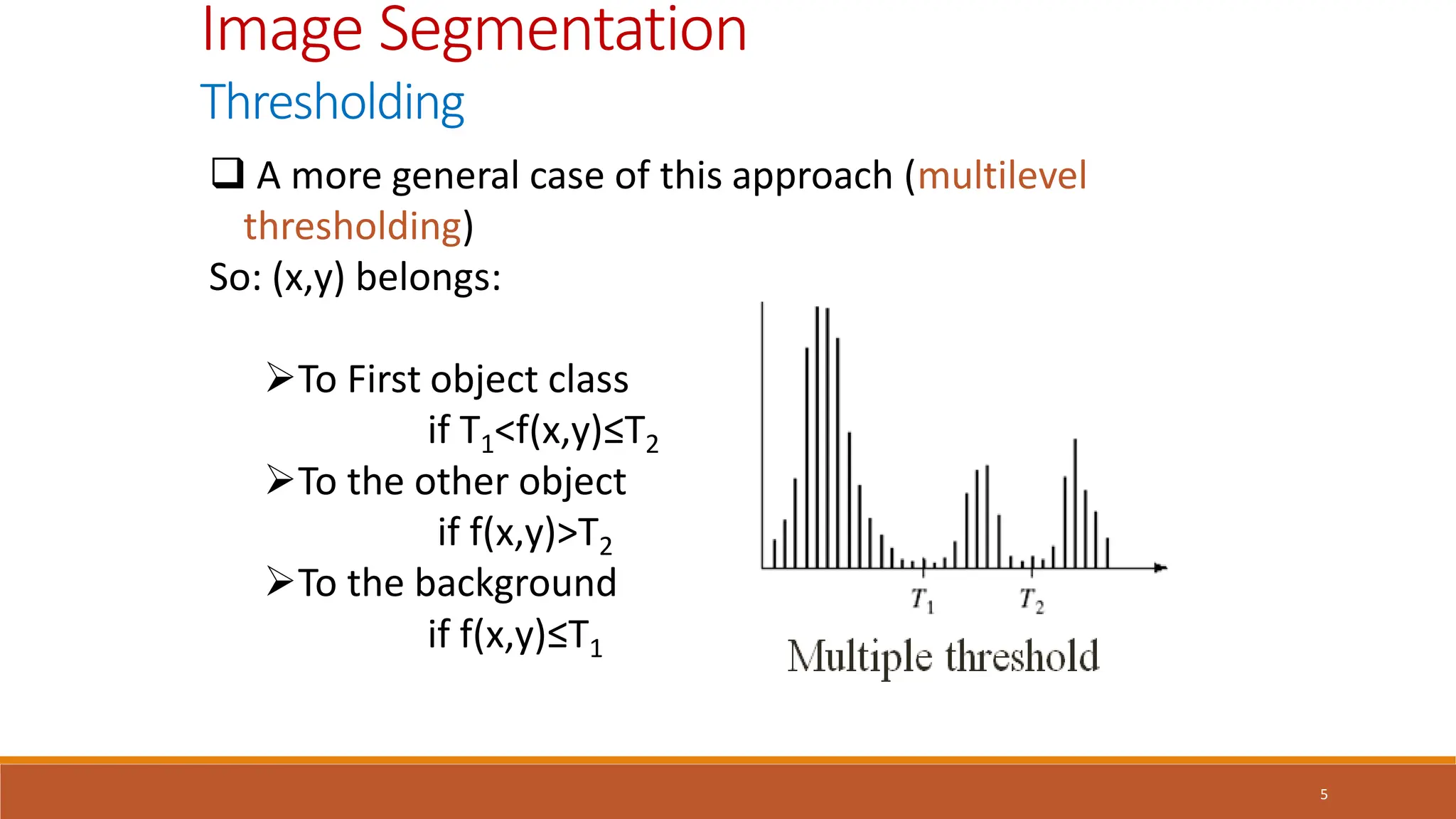
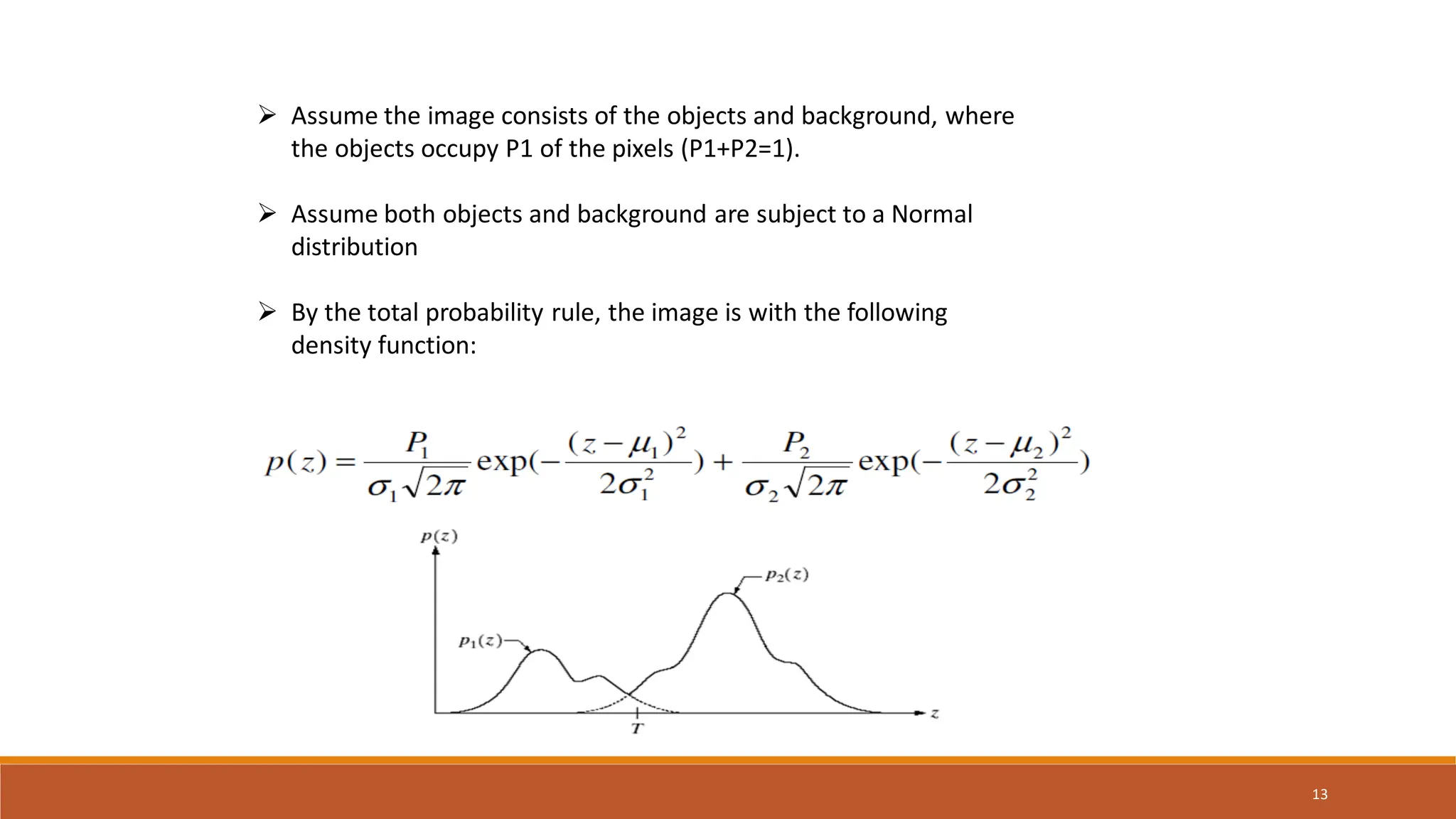
The document discusses image segmentation methods, focusing on thresholding and region-based techniques. It explains the concepts and application of global and adaptive thresholding, as well as region growing and splitting for segmenting images based on pixel similarity. The text highlights the importance of selecting appropriate thresholds and seed points for successful image segmentation in various contexts.

![16
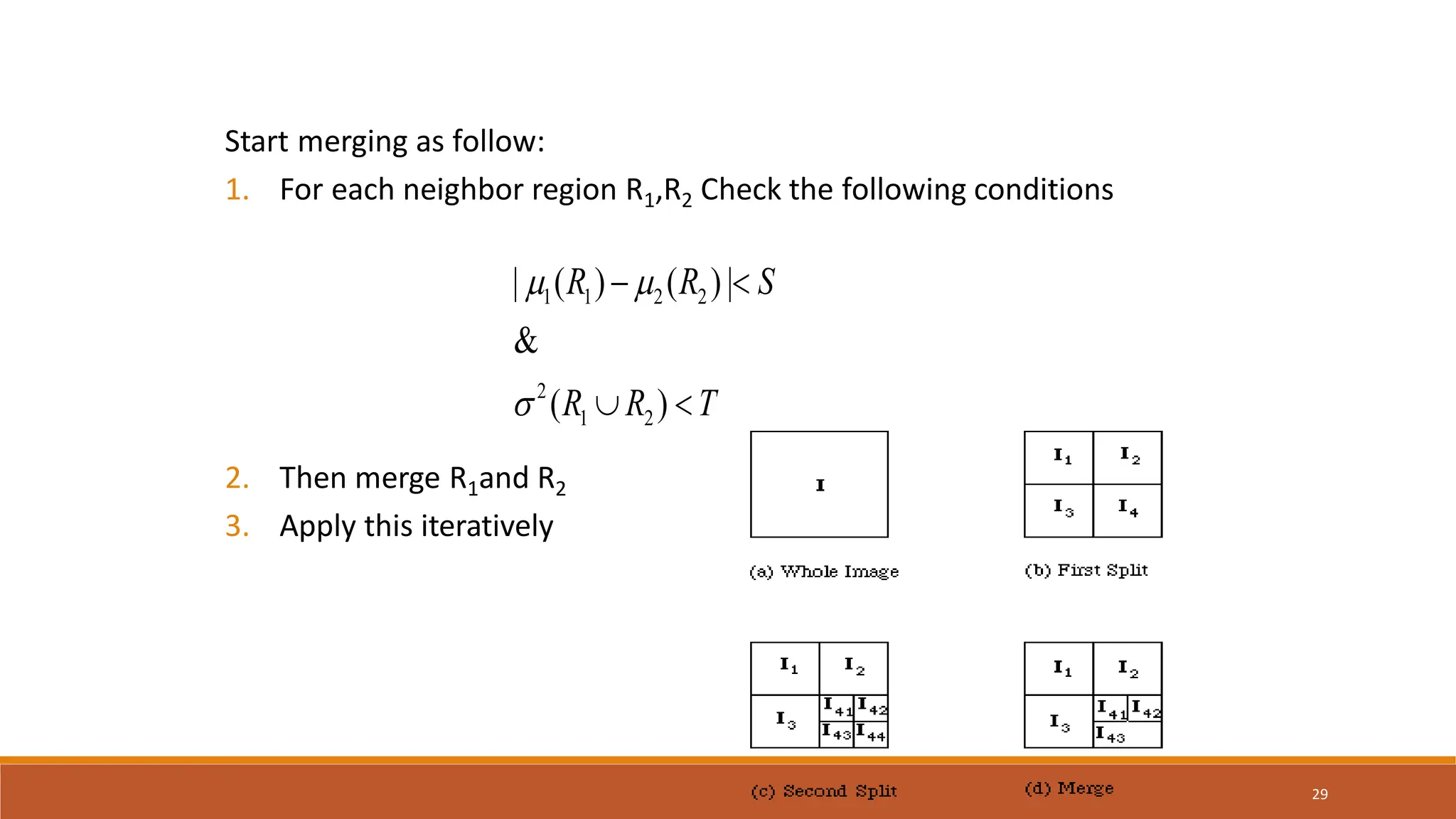
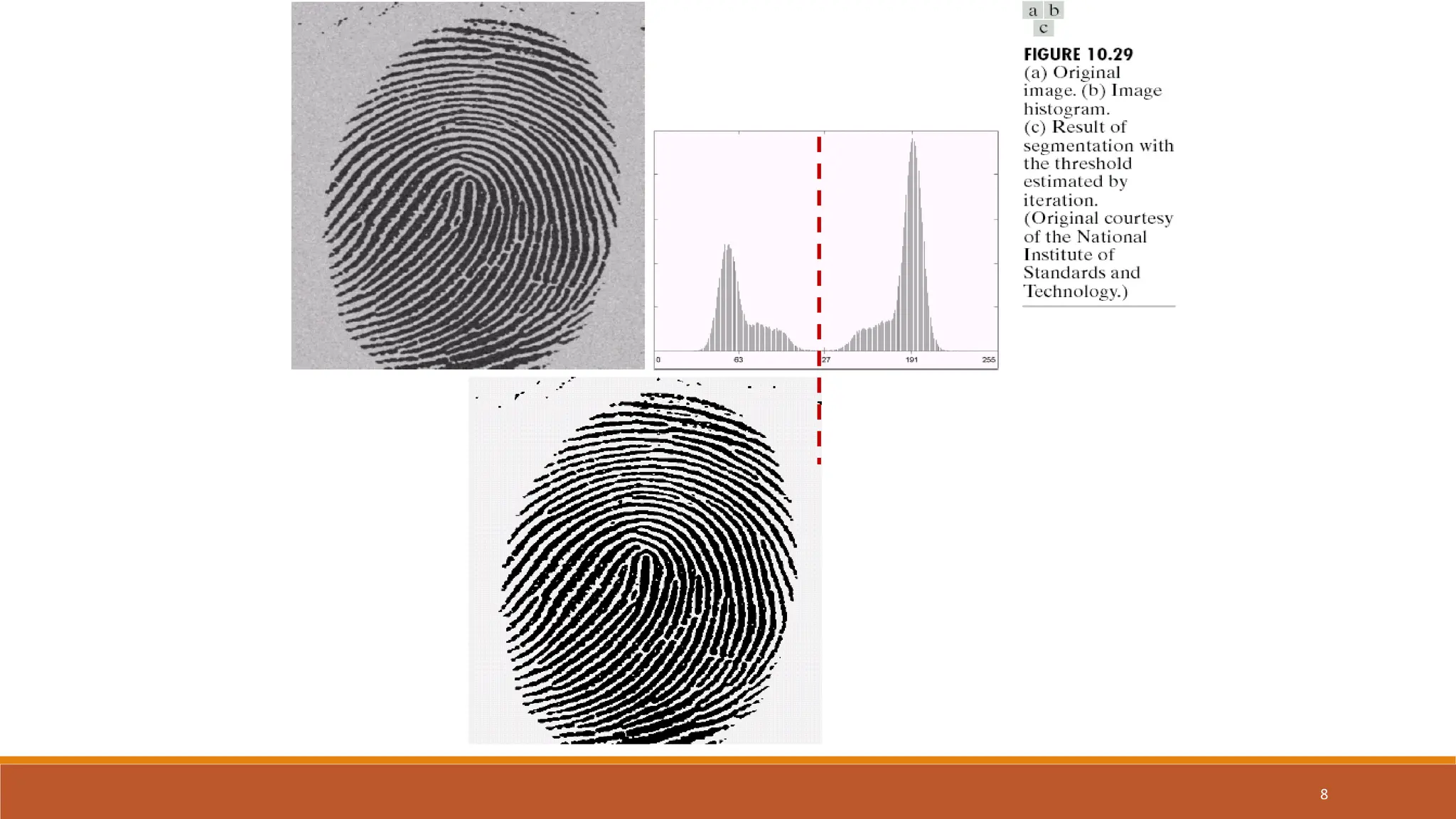
An algorithm used to obtain T automatically for
global thresholding
1. Draw image histogram
2. Compute the average gray level values 1 and 2 for the
pixels in regions G1 and G2.
3. Compute a threshold value: T = ½[1 + 2 ]
4. Compute the binary image g(x,y)
T
y
x
f
T
y
x
f
y
x
g
)
,
(
if
0
)
,
(
if
1
)
,
(](https://image.slidesharecdn.com/lecture8imagesegmentation3-241229150134-c0982e7b/75/Lecture-8_Image-Segmentation_3_dip__-pdf-16-2048.jpg)