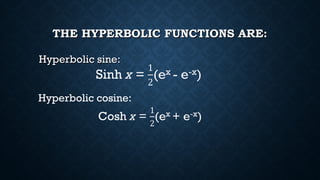
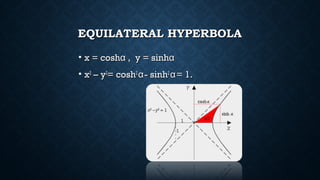
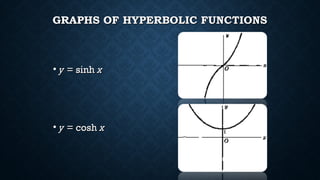
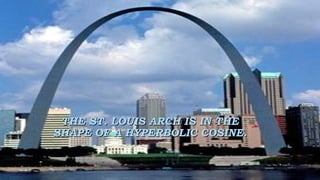
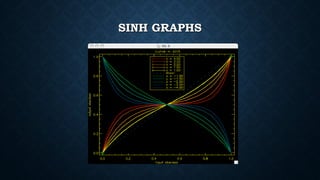
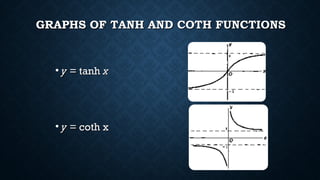
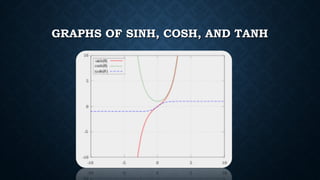
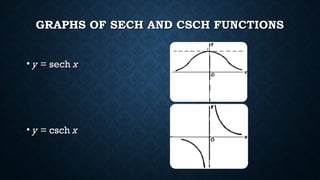
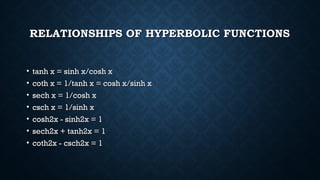
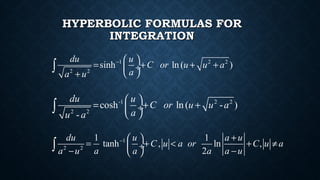
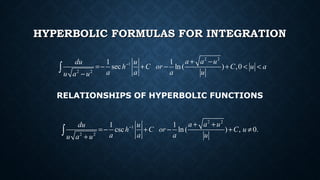
The document discusses hyperbolic functions, their mathematical significance, and various applications including calculus in physics. It introduces hyperbolic sine and cosine, their graphs, and relationships among hyperbolic functions. Additionally, it covers formulas for integration, derivatives, and the real-world application of these functions in areas like electromagnetic theory and fluid dynamics.