Downloaded 22 times

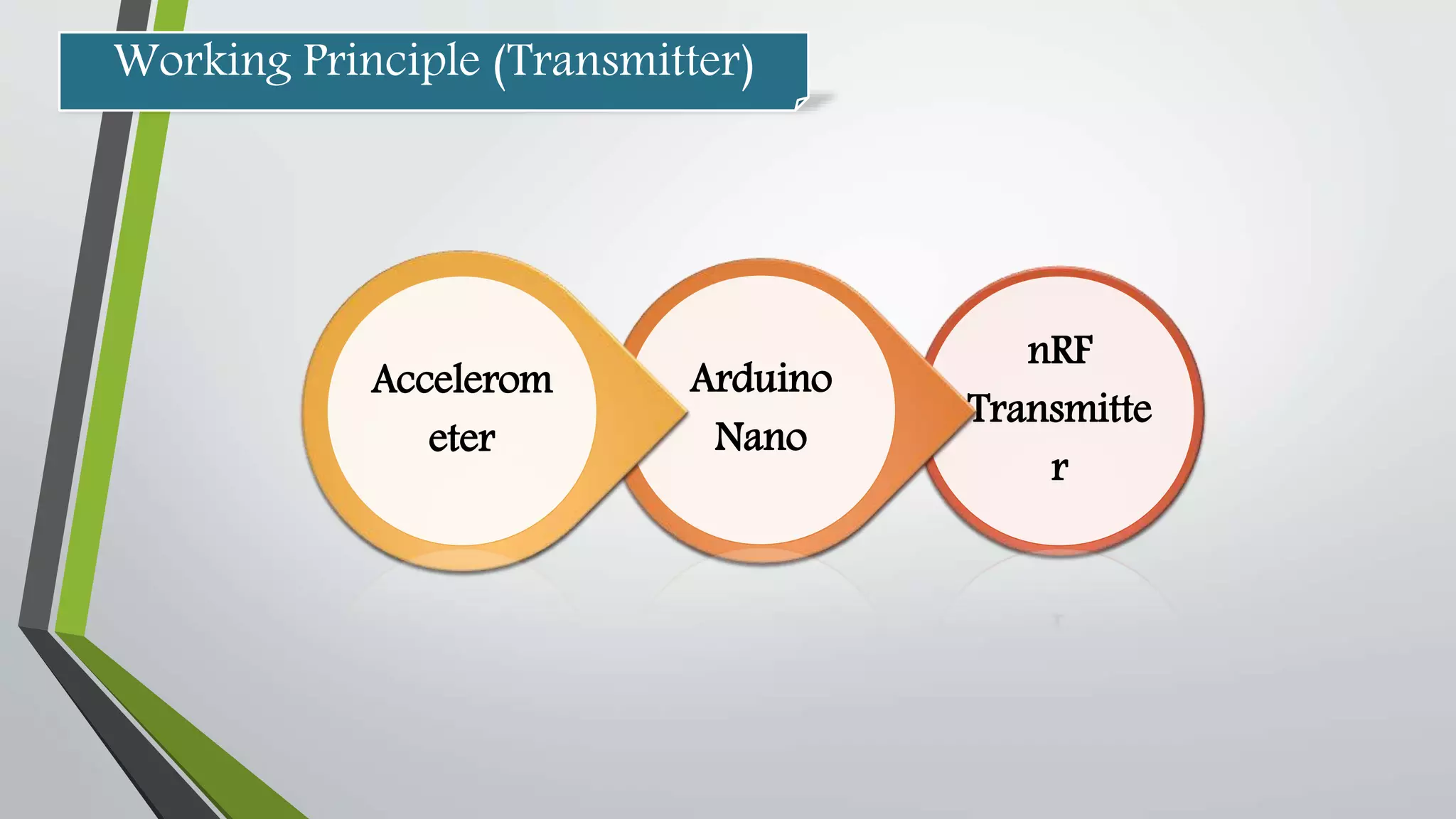
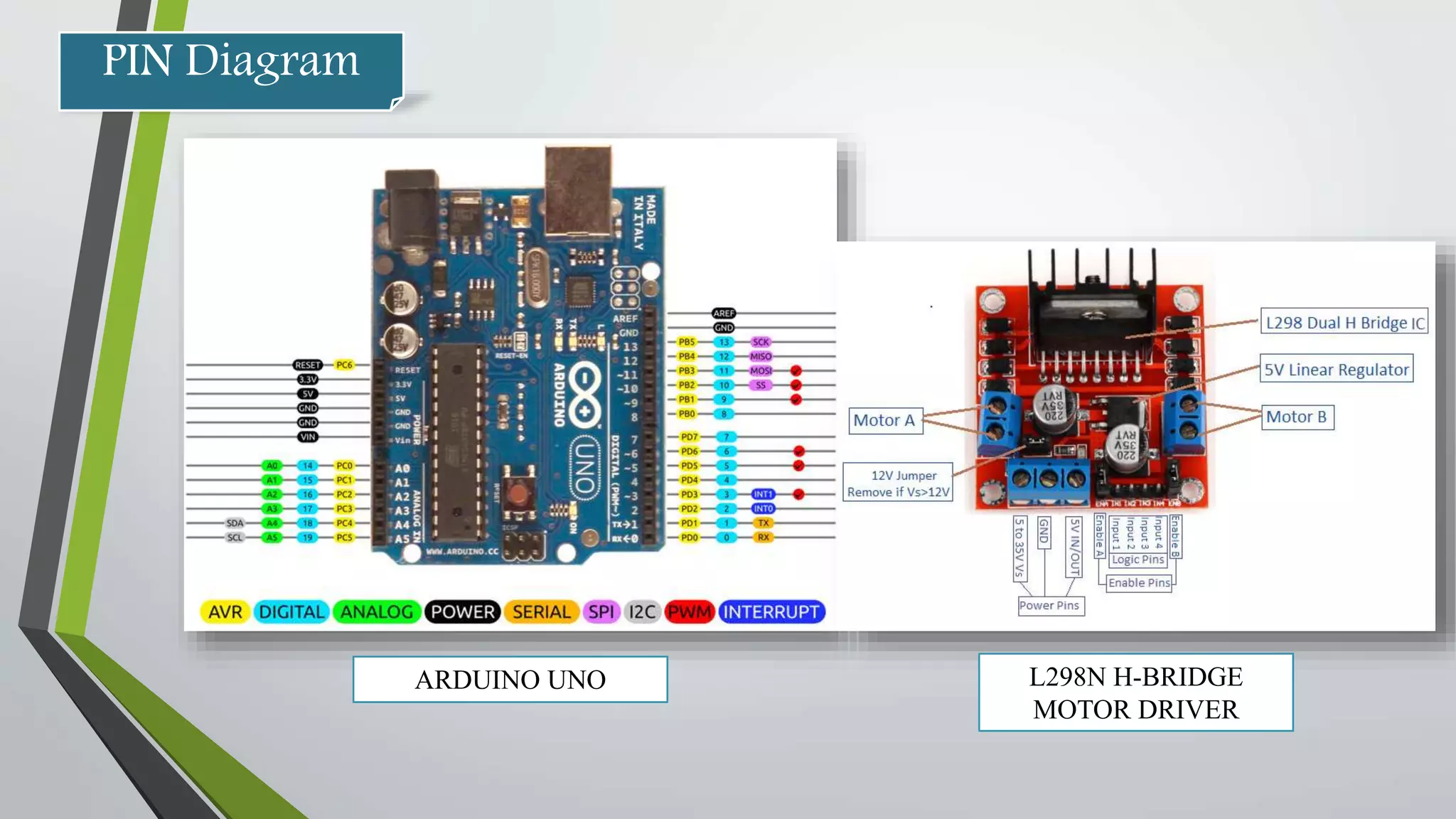
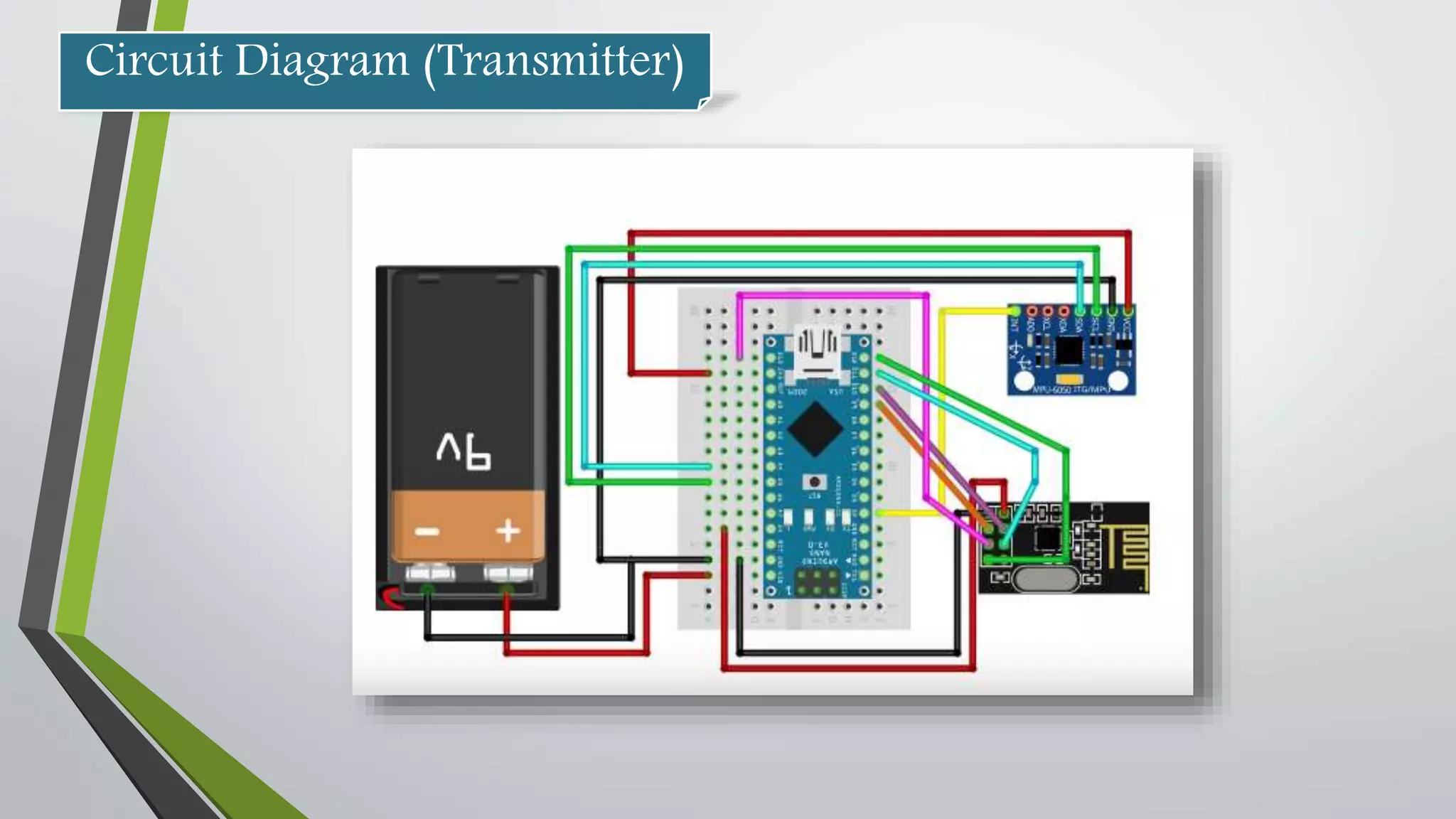
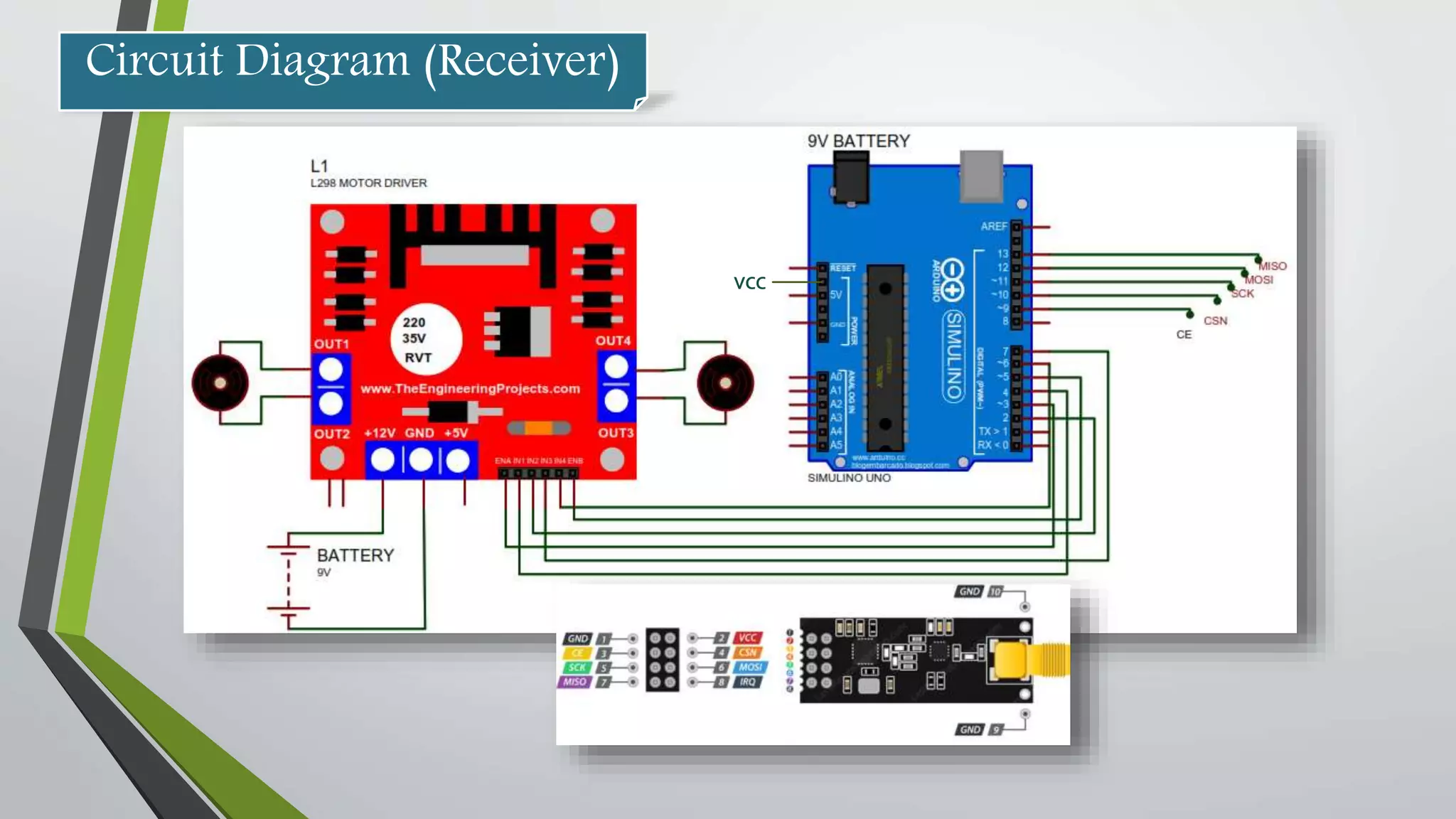
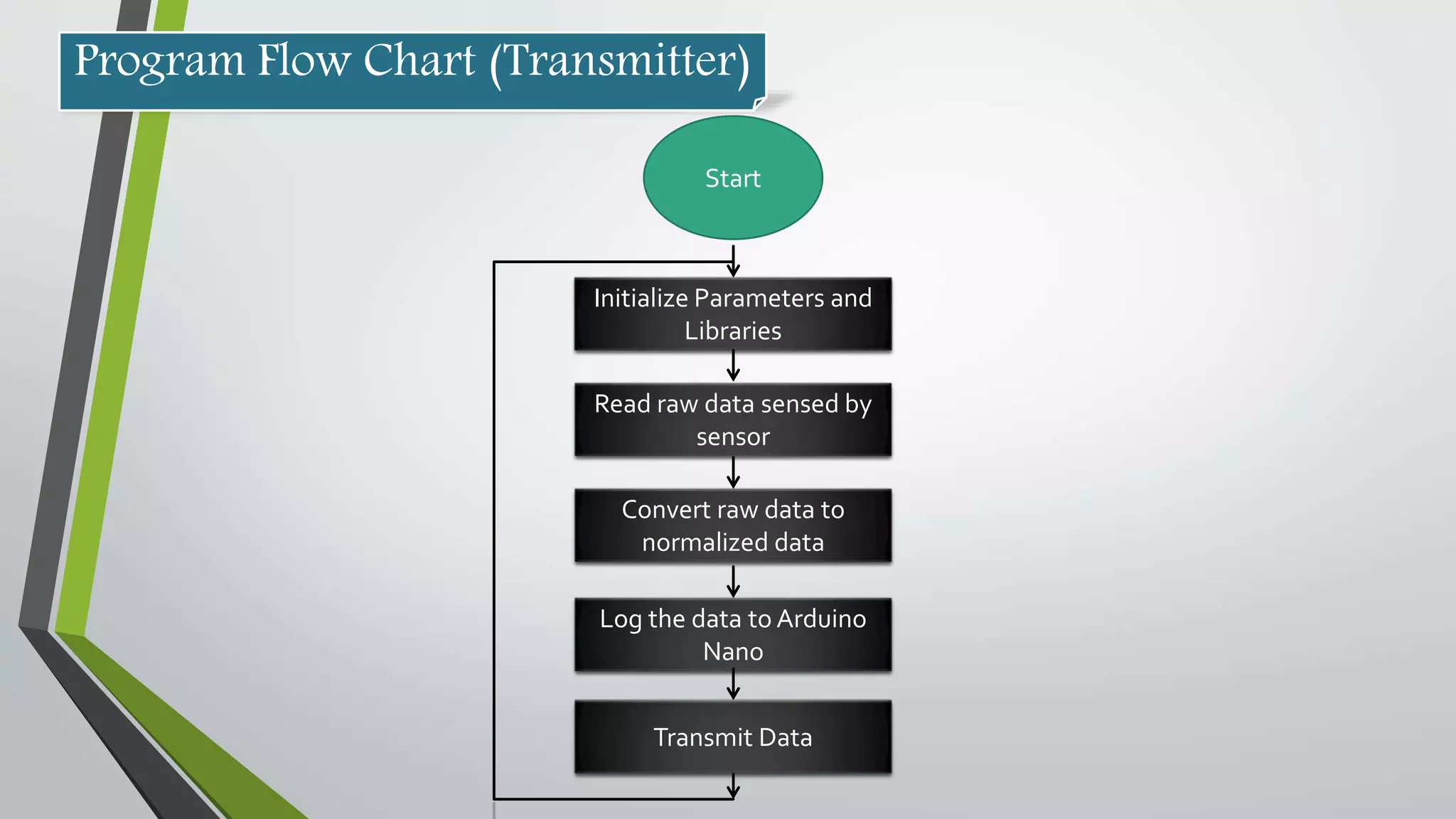
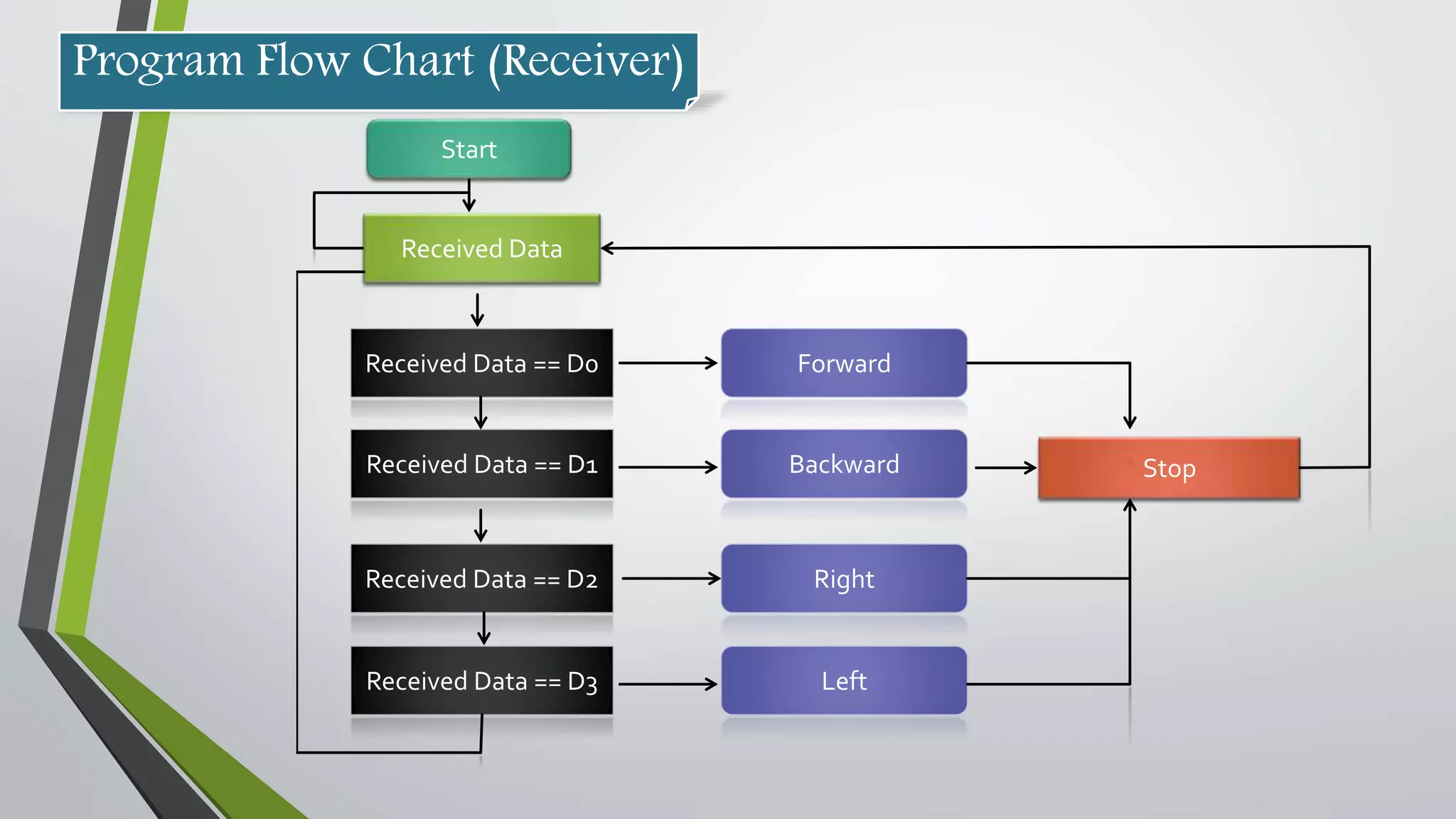
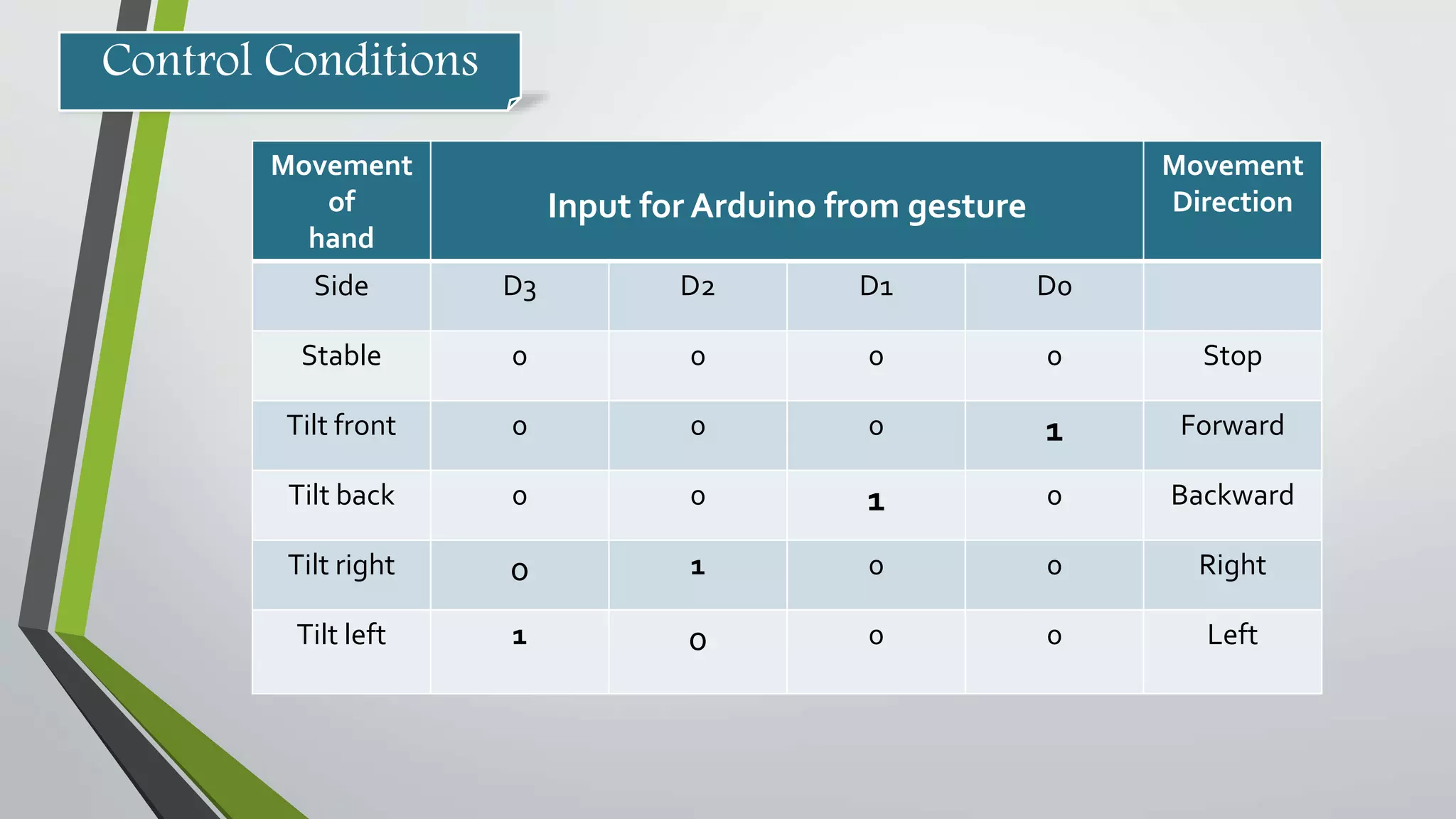



This document describes a gesture controlled robot that is controlled through hand movements detected by an accelerometer in a glove. The accelerometer outputs analog data related to hand movements which is transmitted via RF to the robot. The robot contains an Arduino, motor driver, receiver module and chassis. It will move forward, backward, left or right depending on the hand gesture detected such as tilting the hand front, back, left or right.