Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Deep Learning JP
PPTX, PDF
4,636 views
【DL輪読会】Flow Matching for Generative Modeling
2023/5/19 Deep Learning JP http://deeplearning.jp/seminar-2/
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Downloaded 85 times
1
/ 16
2
/ 16
Most read
3
/ 16
4
/ 16
5
/ 16
6
/ 16
7
/ 16
8
/ 16
Most read
9
/ 16
10
/ 16
11
/ 16
12
/ 16
13
/ 16
14
/ 16
15
/ 16
16
/ 16
Most read
More Related Content
PPTX
【DL輪読会】Toolformer: Language Models Can Teach Themselves to Use Tools
by
Deep Learning JP
PPTX
【DL輪読会】The Forward-Forward Algorithm: Some Preliminary
by
Deep Learning JP
PDF
変分推論と Normalizing Flow
by
Akihiro Nitta
PDF
【DL輪読会】Drag Your GAN: Interactive Point-based Manipulation on the Generative ...
by
Deep Learning JP
PPTX
[DL輪読会]Revisiting Deep Learning Models for Tabular Data (NeurIPS 2021) 表形式デー...
by
Deep Learning JP
PPTX
【DL輪読会】Hyena Hierarchy: Towards Larger Convolutional Language Models
by
Deep Learning JP
PPTX
【DL輪読会】High-Resolution Image Synthesis with Latent Diffusion Models
by
Deep Learning JP
PPTX
【DL輪読会】DayDreamer: World Models for Physical Robot Learning
by
Deep Learning JP
【DL輪読会】Toolformer: Language Models Can Teach Themselves to Use Tools
by
Deep Learning JP
【DL輪読会】The Forward-Forward Algorithm: Some Preliminary
by
Deep Learning JP
変分推論と Normalizing Flow
by
Akihiro Nitta
【DL輪読会】Drag Your GAN: Interactive Point-based Manipulation on the Generative ...
by
Deep Learning JP
[DL輪読会]Revisiting Deep Learning Models for Tabular Data (NeurIPS 2021) 表形式デー...
by
Deep Learning JP
【DL輪読会】Hyena Hierarchy: Towards Larger Convolutional Language Models
by
Deep Learning JP
【DL輪読会】High-Resolution Image Synthesis with Latent Diffusion Models
by
Deep Learning JP
【DL輪読会】DayDreamer: World Models for Physical Robot Learning
by
Deep Learning JP
What's hot
PDF
SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜
by
SSII
PDF
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
PDF
Layer Normalization@NIPS+読み会・関西
by
Keigo Nishida
PDF
【メタサーベイ】数式ドリブン教師あり学習
by
cvpaper. challenge
PPTX
【論文紹介】How Powerful are Graph Neural Networks?
by
Masanao Ochi
PPTX
Curriculum Learning (関東CV勉強会)
by
Yoshitaka Ushiku
PDF
「世界モデル」と関連研究について
by
Masahiro Suzuki
PPTX
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
PDF
Generative Models(メタサーベイ )
by
cvpaper. challenge
PPTX
[DL輪読会]Flow-based Deep Generative Models
by
Deep Learning JP
PDF
画像生成・生成モデル メタサーベイ
by
cvpaper. challenge
PDF
研究効率化Tips Ver.2
by
cvpaper. challenge
PPTX
SSII2020SS: グラフデータでも深層学習 〜 Graph Neural Networks 入門 〜
by
SSII
PPTX
近年のHierarchical Vision Transformer
by
Yusuke Uchida
PPTX
勾配ブースティングの基礎と最新の動向 (MIRU2020 Tutorial)
by
RyuichiKanoh
PPTX
マルチモーダル深層学習の研究動向
by
Koichiro Mori
PPTX
【DL輪読会】Scaling Laws for Neural Language Models
by
Deep Learning JP
PDF
Transformer メタサーベイ
by
cvpaper. challenge
PPTX
Swin Transformer (ICCV'21 Best Paper) を完璧に理解する資料
by
Yusuke Uchida
PDF
[DL輪読会]Decision Transformer: Reinforcement Learning via Sequence Modeling
by
Deep Learning JP
SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜
by
SSII
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
Layer Normalization@NIPS+読み会・関西
by
Keigo Nishida
【メタサーベイ】数式ドリブン教師あり学習
by
cvpaper. challenge
【論文紹介】How Powerful are Graph Neural Networks?
by
Masanao Ochi
Curriculum Learning (関東CV勉強会)
by
Yoshitaka Ushiku
「世界モデル」と関連研究について
by
Masahiro Suzuki
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
Generative Models(メタサーベイ )
by
cvpaper. challenge
[DL輪読会]Flow-based Deep Generative Models
by
Deep Learning JP
画像生成・生成モデル メタサーベイ
by
cvpaper. challenge
研究効率化Tips Ver.2
by
cvpaper. challenge
SSII2020SS: グラフデータでも深層学習 〜 Graph Neural Networks 入門 〜
by
SSII
近年のHierarchical Vision Transformer
by
Yusuke Uchida
勾配ブースティングの基礎と最新の動向 (MIRU2020 Tutorial)
by
RyuichiKanoh
マルチモーダル深層学習の研究動向
by
Koichiro Mori
【DL輪読会】Scaling Laws for Neural Language Models
by
Deep Learning JP
Transformer メタサーベイ
by
cvpaper. challenge
Swin Transformer (ICCV'21 Best Paper) を完璧に理解する資料
by
Yusuke Uchida
[DL輪読会]Decision Transformer: Reinforcement Learning via Sequence Modeling
by
Deep Learning JP
Similar to 【DL輪読会】Flow Matching for Generative Modeling
PDF
ECCV 2016 まとめ
by
cvpaper. challenge
PPTX
CVPR2017 参加報告 速報版 本会議 2日目
by
Atsushi Hashimoto
PPTX
[DL輪読会]Deep Face Recognition: A Survey
by
Deep Learning JP
PDF
Domain Adaptive Faster R-CNN for Object Detection in the Wild 論文紹介
by
Tsukasa Takagi
PPTX
Deep Learning基本理論とTensorFlow
by
Tadaichiro Nakano
PDF
【DL輪読会】Learning Instance-Specific Adaptation for Cross-Domain Segmentation (E...
by
Deep Learning JP
PPTX
CVPR2018 参加報告(速報版)初日
by
Atsushi Hashimoto
PPTX
【論文読み会】Moser Flow: Divergence-based Generative Modeling on Manifolds
by
ARISE analytics
PPTX
【DL輪読会】DreamFusion: Text-to-3D using 2D Diffusion
by
Deep Learning JP
PDF
【学会聴講報告】CVPR2024からみるVision最先端トレンド / CVPR2024 report
by
Sony - Neural Network Libraries
PDF
Up to GLOW
by
Shunsuke NAKATSUKA
PDF
2014/5/29 東大相澤山崎研勉強会:パターン認識とニューラルネットワーク,Deep Learningまで
by
Hokuto Kagaya
PPTX
CVPR2018 pix2pixHD論文紹介 (CV勉強会@関東)
by
Tenki Lee
PPTX
Image net classification with Deep Convolutional Neural Networks
by
Shingo Horiuchi
PPTX
Deep sets
by
Tomohiro Takahashi
PDF
[DL輪読会]Convolutional Conditional Neural Processesと Neural Processes Familyの紹介
by
Deep Learning JP
PDF
SPADE :Semantic Image Synthesis with Spatially-Adaptive Normalization
by
Tenki Lee
PDF
【2016.06】cvpaper.challenge2016
by
cvpaper. challenge
PDF
【2015.07】(2/2)cvpaper.challenge@CVPR2015
by
cvpaper. challenge
PDF
Deep Learningの基礎と応用
by
Seiya Tokui
ECCV 2016 まとめ
by
cvpaper. challenge
CVPR2017 参加報告 速報版 本会議 2日目
by
Atsushi Hashimoto
[DL輪読会]Deep Face Recognition: A Survey
by
Deep Learning JP
Domain Adaptive Faster R-CNN for Object Detection in the Wild 論文紹介
by
Tsukasa Takagi
Deep Learning基本理論とTensorFlow
by
Tadaichiro Nakano
【DL輪読会】Learning Instance-Specific Adaptation for Cross-Domain Segmentation (E...
by
Deep Learning JP
CVPR2018 参加報告(速報版)初日
by
Atsushi Hashimoto
【論文読み会】Moser Flow: Divergence-based Generative Modeling on Manifolds
by
ARISE analytics
【DL輪読会】DreamFusion: Text-to-3D using 2D Diffusion
by
Deep Learning JP
【学会聴講報告】CVPR2024からみるVision最先端トレンド / CVPR2024 report
by
Sony - Neural Network Libraries
Up to GLOW
by
Shunsuke NAKATSUKA
2014/5/29 東大相澤山崎研勉強会:パターン認識とニューラルネットワーク,Deep Learningまで
by
Hokuto Kagaya
CVPR2018 pix2pixHD論文紹介 (CV勉強会@関東)
by
Tenki Lee
Image net classification with Deep Convolutional Neural Networks
by
Shingo Horiuchi
Deep sets
by
Tomohiro Takahashi
[DL輪読会]Convolutional Conditional Neural Processesと Neural Processes Familyの紹介
by
Deep Learning JP
SPADE :Semantic Image Synthesis with Spatially-Adaptive Normalization
by
Tenki Lee
【2016.06】cvpaper.challenge2016
by
cvpaper. challenge
【2015.07】(2/2)cvpaper.challenge@CVPR2015
by
cvpaper. challenge
Deep Learningの基礎と応用
by
Seiya Tokui
More from Deep Learning JP
PPTX
【DL輪読会】AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
by
Deep Learning JP
PPTX
【DL輪読会】事前学習用データセットについて
by
Deep Learning JP
PPTX
【DL輪読会】 "Learning to render novel views from wide-baseline stereo pairs." CVP...
by
Deep Learning JP
PPTX
【DL輪読会】Zero-Shot Dual-Lens Super-Resolution
by
Deep Learning JP
PPTX
【DL輪読会】BloombergGPT: A Large Language Model for Finance arxiv
by
Deep Learning JP
PPTX
【DL輪読会】マルチモーダル LLM
by
Deep Learning JP
PDF
【 DL輪読会】ToolLLM: Facilitating Large Language Models to Master 16000+ Real-wo...
by
Deep Learning JP
PPTX
【DL輪読会】AnyLoc: Towards Universal Visual Place Recognition
by
Deep Learning JP
PDF
【DL輪読会】Can Neural Network Memorization Be Localized?
by
Deep Learning JP
PPTX
【DL輪読会】Hopfield network 関連研究について
by
Deep Learning JP
PPTX
【DL輪読会】SimPer: Simple self-supervised learning of periodic targets( ICLR 2023 )
by
Deep Learning JP
PDF
【DL輪読会】RLCD: Reinforcement Learning from Contrast Distillation for Language M...
by
Deep Learning JP
PDF
【DL輪読会】"Secrets of RLHF in Large Language Models Part I: PPO"
by
Deep Learning JP
PPTX
【DL輪読会】"Language Instructed Reinforcement Learning for Human-AI Coordination "
by
Deep Learning JP
PPTX
【DL輪読会】Llama 2: Open Foundation and Fine-Tuned Chat Models
by
Deep Learning JP
PDF
【DL輪読会】"Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware"
by
Deep Learning JP
PPTX
【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks fo...
by
Deep Learning JP
PDF
【DL輪読会】Self-Supervised Learning from Images with a Joint-Embedding Predictive...
by
Deep Learning JP
PPTX
【DL輪読会】Towards Understanding Ensemble, Knowledge Distillation and Self-Distil...
by
Deep Learning JP
PPTX
【DL輪読会】VIP: Towards Universal Visual Reward and Representation via Value-Impl...
by
Deep Learning JP
【DL輪読会】AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
by
Deep Learning JP
【DL輪読会】事前学習用データセットについて
by
Deep Learning JP
【DL輪読会】 "Learning to render novel views from wide-baseline stereo pairs." CVP...
by
Deep Learning JP
【DL輪読会】Zero-Shot Dual-Lens Super-Resolution
by
Deep Learning JP
【DL輪読会】BloombergGPT: A Large Language Model for Finance arxiv
by
Deep Learning JP
【DL輪読会】マルチモーダル LLM
by
Deep Learning JP
【 DL輪読会】ToolLLM: Facilitating Large Language Models to Master 16000+ Real-wo...
by
Deep Learning JP
【DL輪読会】AnyLoc: Towards Universal Visual Place Recognition
by
Deep Learning JP
【DL輪読会】Can Neural Network Memorization Be Localized?
by
Deep Learning JP
【DL輪読会】Hopfield network 関連研究について
by
Deep Learning JP
【DL輪読会】SimPer: Simple self-supervised learning of periodic targets( ICLR 2023 )
by
Deep Learning JP
【DL輪読会】RLCD: Reinforcement Learning from Contrast Distillation for Language M...
by
Deep Learning JP
【DL輪読会】"Secrets of RLHF in Large Language Models Part I: PPO"
by
Deep Learning JP
【DL輪読会】"Language Instructed Reinforcement Learning for Human-AI Coordination "
by
Deep Learning JP
【DL輪読会】Llama 2: Open Foundation and Fine-Tuned Chat Models
by
Deep Learning JP
【DL輪読会】"Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware"
by
Deep Learning JP
【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks fo...
by
Deep Learning JP
【DL輪読会】Self-Supervised Learning from Images with a Joint-Embedding Predictive...
by
Deep Learning JP
【DL輪読会】Towards Understanding Ensemble, Knowledge Distillation and Self-Distil...
by
Deep Learning JP
【DL輪読会】VIP: Towards Universal Visual Reward and Representation via Value-Impl...
by
Deep Learning JP
【DL輪読会】Flow Matching for Generative Modeling
1.
DEEP LEARNING JP [DL
Papers] 論文紹介: Flow Matching for Generative Modeling Ryosuke Ohashi, bestat Inc. http://deeplearning.jp/
2.
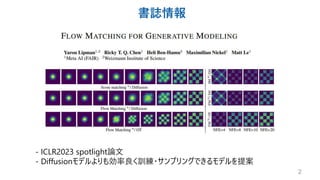
書誌情報 2 - ICLR2023 spotlight論文 -
Diffusionモデルよりも効率良く訓練・サンプリングできるモデルを提案
3.
背景:Diffusionモデル 3 - 最近Diffusionモデルがめちゃ活躍している - 2D画像生成,動画生成,モーション生成,3Dモデル生成,… -
Diffusionモデルの良い点・悪い点 - 良い点:安定した訓練,高品質&多様性の高いサンプル生成 - 悪い点:訓練・サンプル生成に時間がかかる ⇒ 訓練・サンプル生成をもっと効率化できないか?
4.
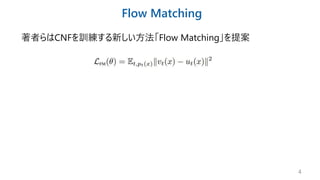
Flow Matching 4 著者らはCNFを訓練する新しい方法「Flow Matching」を提案
5.
補足:CNF 5 CNF (Continuous Normalizing
Flow) [Chen et al. 2018] データ空間の可逆変換のなめらかな列{Φ_t}で,Φ_0=idかつ,Φ_1が事 前確率分布p_0からデータ確率分布p_1への変換を誘導するもののこと p_0 ※p1がΦ_1による確率密度の変数変 換公式に従い与えられる,ということ
6.
補足:CNF 6 実は,{Φ_t}を直接モデリングするより, その時間発展を記述するODEをモデリングしたほうが便利 v_t * Δt
“=” Φ_(t+Δt) - Φ_t - v_tは可逆じゃなくてよい,解Φ_tは自動的に可逆になる - 複雑な変換Φよりも差分vのほうがMLPでフィッティングしやすい(ResNet的な)
7.
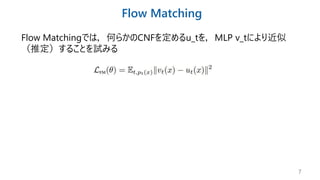
Flow Matching 7 Flow Matchingでは,何らかのCNFを定めるu_tを,MLP
v_tにより近似 (推定)することを試みる
8.
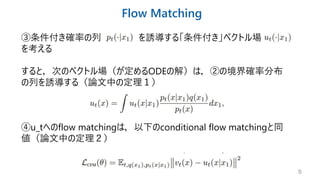
Flow Matching 8 著者らは,データ分布qからのサンプルのみが与えられているとき,サンプル 毎の「条件付きベクトル場」の列を使ってCNFを構成&訓練できることを示 した: ①各データ x_1
に対し,次をみたす条件付き確率の列 を考える ②境界確率分布の列を考える 構成により,p_0 = p,p_1はqの良い近似になっている (σ << 1)
9.
Flow Matching 9 ③条件付き確率の列 を誘導する「条件付き」ベクトル場 を考える すると,次のベクトル場(が定めるODEの解)は,②の境界確率分布 の列を誘導する(論文中の定理1) ④u_tへのflow
matchingは,以下のconditional flow matchingと同 値(論文中の定理2)
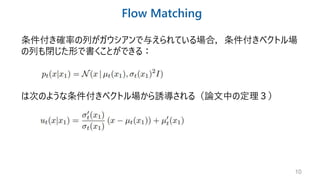
10.
Flow Matching 10 条件付き確率の列がガウシアンで与えられている場合,条件付きベクトル場 の列も閉じた形で書くことができる: は次のような条件付きベクトル場から誘導される(論文中の定理3)
11.
具体例① 11 拡散条件付きベクトル場 (Diffusion Conditional
Vector Fields) とすると, 実はこれはODE版NCSN [Song et al. 2020]と同じCNFになっている ※ただし,Score MatchingではODEの係数の一部に現れるスコアのみをマッチングで求め,Flow MatchingではODEの係数そのものをマッチングで求める,という違いがある
12.
具体例② 12 最適輸送条件付きベクトル場 (OT Conditional
Vector Fields) とすると, このベクトル場は,最適輸送の理論でdisplacement interpolationと呼ば れる特別な変換になっているらしい
13.
実験結果 13 CIFAR-10,downsampled ImageNetの条件なし生成モデルの性能比較 Flow Matching
w/ OT CVFsにより, 既存研究より高品質なサンプルを半分以下のサンプリングステップ数で生成 できることを実験的に示した
14.
実験結果 14 DDPMよりもFIDスコアが順調に下がる
15.
実験結果 15 サンプリング効率もよい ※Flow Matchingでは,サンプリングはODEを数値的に解いて行う SDEを解くより数値誤差を押さえやすく効率が良くなるらしい
16.
まとめ・感想 16 まとめ - CNFの新しい訓練アルゴリズム「Flow Matching」を提案 -
Diffusionよりも効率的に訓練・サンプリングできるモデルを提案 感想 - Flow Matchingの定式化は幾何的にイメージしやすい点がいいと思った - 今後実際に何かに試してみたい
Editor's Notes
#2
Beyond Reward Based End-to-End RL: Representation Learning and Dataset Optimization Perspective
Download
![DEEP LEARNING JP
[DL Papers]
論文紹介:
Flow Matching for Generative Modeling
Ryosuke Ohashi, bestat Inc.
http://deeplearning.jp/](https://image.slidesharecdn.com/20230519ohashi-230519022320-f9ef0887/85/DL-Flow-Matching-for-Generative-Modeling-1-320.jpg)

![補足:CNF
5
CNF (Continuous Normalizing Flow) [Chen et al. 2018]
データ空間の可逆変換のなめらかな列{Φ_t}で,Φ_0=idかつ,Φ_1が事
前確率分布p_0からデータ確率分布p_1への変換を誘導するもののこと
p_0
※p1がΦ_1による確率密度の変数変
換公式に従い与えられる,ということ](https://image.slidesharecdn.com/20230519ohashi-230519022320-f9ef0887/85/DL-Flow-Matching-for-Generative-Modeling-5-320.jpg)


![具体例①
11
拡散条件付きベクトル場 (Diffusion Conditional Vector Fields)
とすると,
実はこれはODE版NCSN [Song et al. 2020]と同じCNFになっている
※ただし,Score MatchingではODEの係数の一部に現れるスコアのみをマッチングで求め,Flow
MatchingではODEの係数そのものをマッチングで求める,という違いがある](https://image.slidesharecdn.com/20230519ohashi-230519022320-f9ef0887/85/DL-Flow-Matching-for-Generative-Modeling-11-320.jpg)









![[DL輪読会]Revisiting Deep Learning Models for Tabular Data (NeurIPS 2021) 表形式デー...](https://cdn.slidesharecdn.com/ss_thumbnails/dl20220318dlfin-220322065433-thumbnail.jpg?width=640&height=640&fit=bounds)



![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]Flow-based Deep Generative Models](https://cdn.slidesharecdn.com/ss_thumbnails/20190307-190328024744-thumbnail.jpg?width=640&height=640&fit=bounds)









![[DL輪読会]Decision Transformer: Reinforcement Learning via Sequence Modeling](https://cdn.slidesharecdn.com/ss_thumbnails/decisiontransformer20210709zhangxin-210709021501-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Deep Face Recognition: A Survey](https://cdn.slidesharecdn.com/ss_thumbnails/20181221-181221023935-thumbnail.jpg?width=640&height=640&fit=bounds)











![[DL輪読会]Convolutional Conditional Neural Processesと Neural Processes Familyの紹介](https://cdn.slidesharecdn.com/ss_thumbnails/20191220readingpaperconvcnp-191220034420-thumbnail.jpg?width=640&height=640&fit=bounds)























