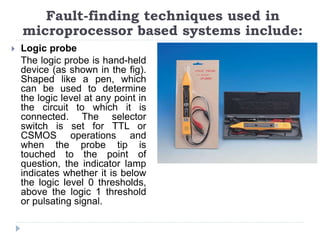
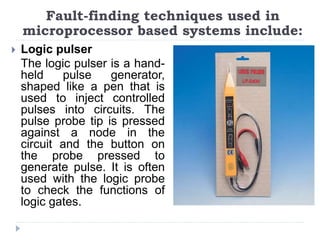
This document discusses various fault detection techniques and common hardware faults. It describes techniques like replication checks, expected value checks, timing checks, reversal checks, and parity/error coding checks to detect faults. Some common hardware faults mentioned are dirty or faulty sensors, switches, relays, motors, hydraulic/pneumatic systems, and microprocessor chips, passive components, open/short circuits, and software bugs. Fault-finding techniques for microprocessor systems include visual inspection, using a multimeter, logic probe, logic pulser, and current tracer.