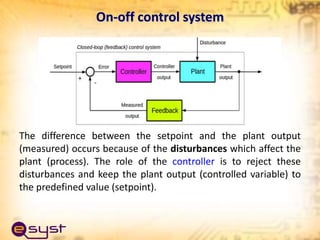
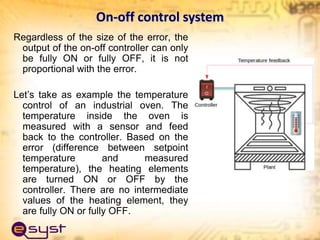
This document provides an overview of on-off and continuous control systems for mechanical, thermal, and chemical systems. It discusses how an on-off controller works by switching fully on when the error is positive and fully off when the error is zero or negative. As an example, it describes how an on-off controller could be used to control the temperature of an industrial oven by turning the heating elements fully on or fully off based on the difference between the setpoint and measured temperatures. The document also notes that systems have characteristics like dead time and capacitance that affect how quickly a controller can respond to disturbances.






























































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)



