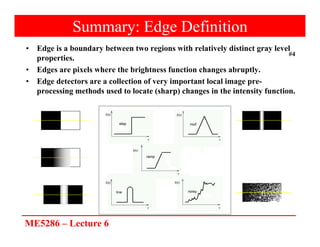
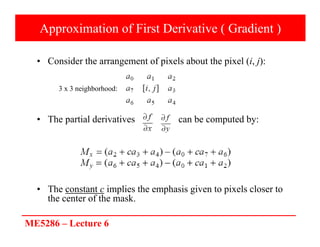
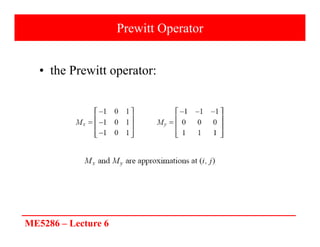
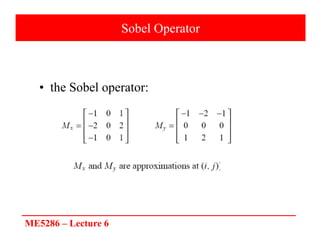
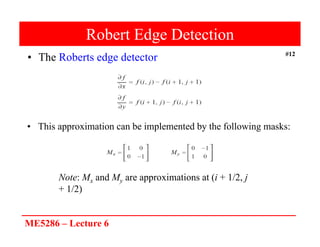
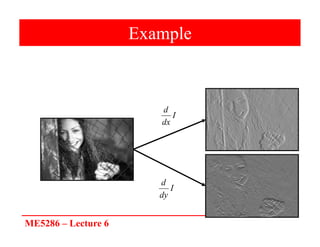
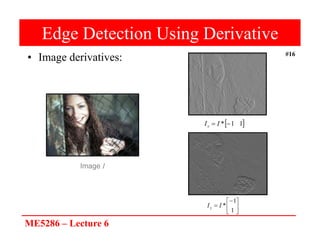
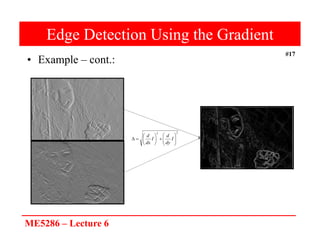
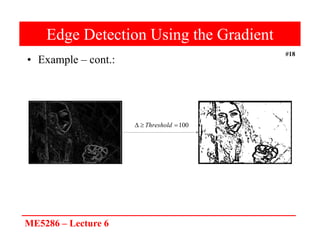
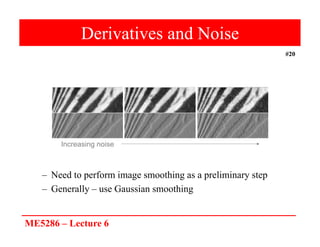
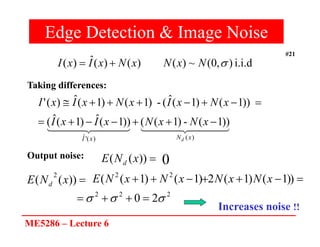
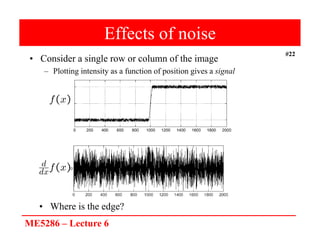
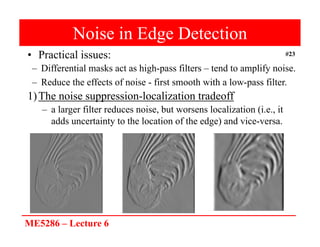
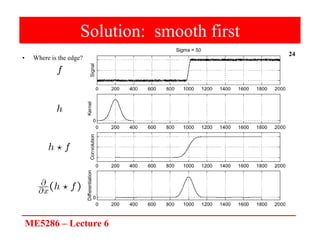
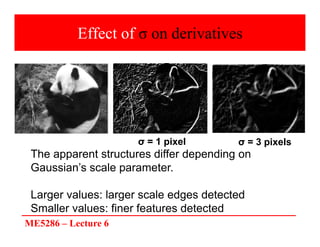
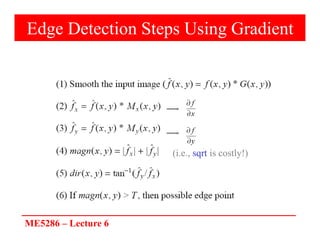
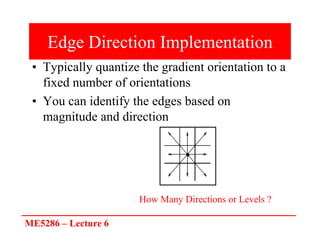
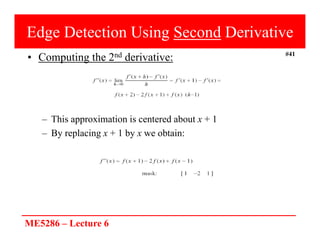
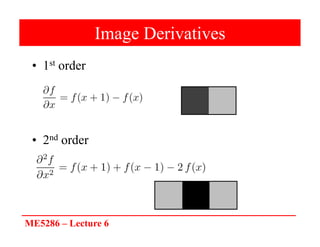
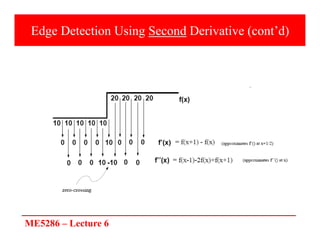
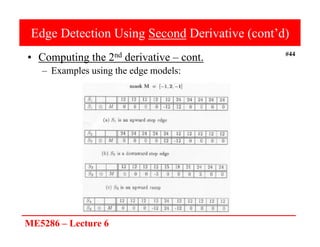
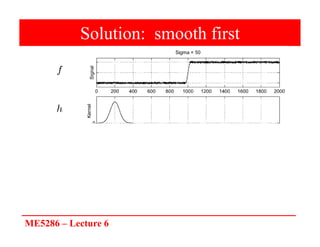
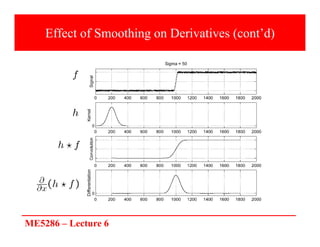
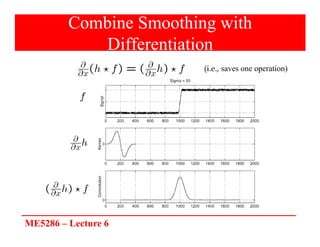
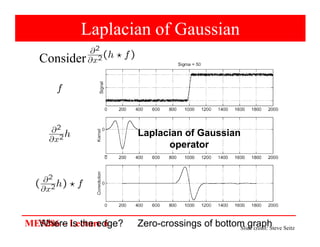
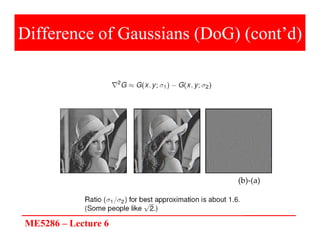
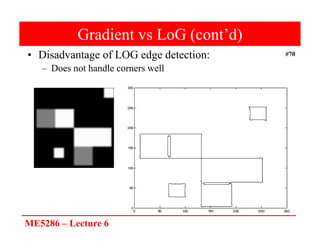
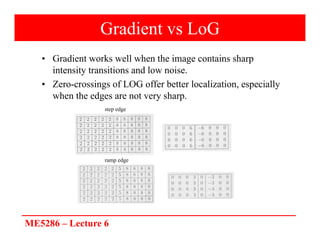
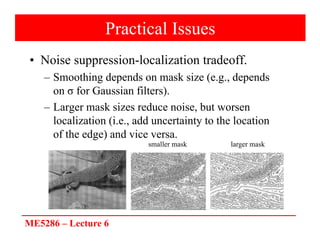
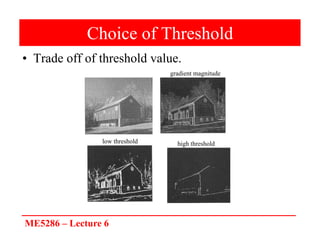
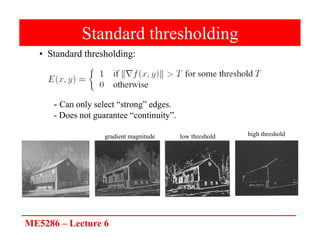
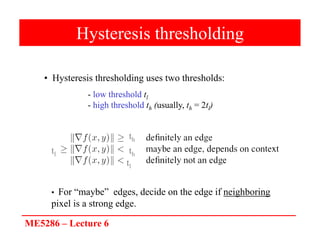
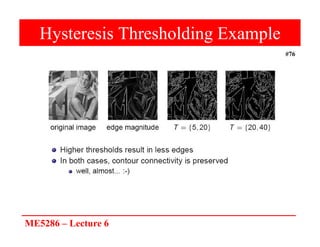
The document discusses edge detection in image processing, focusing on methods using first and second order derivatives, such as Sobel and Roberts operators, and the Laplacian of Gaussian. It emphasizes the importance of noise reduction techniques, optimal edge detection criteria, and the impact of variations in Gaussian smoothing on edge detection outcomes. Additionally, it covers practical issues such as noise suppression-localization tradeoffs and different thresholding strategies for effective edge identification.