Downloaded 540 times
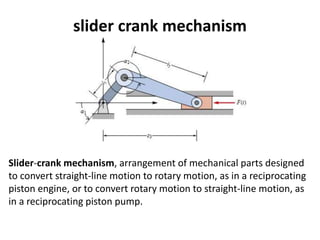
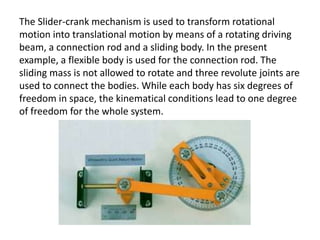
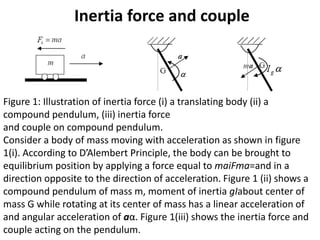
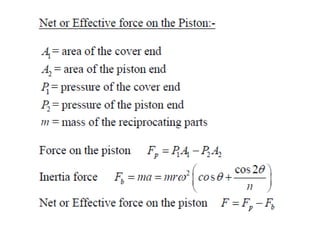

The document discusses dynamic force analysis, which incorporates inertia forces into the examination of mechanisms, specifically using D'Alembert's principle to equate dynamic systems to static ones. It also explains the slider-crank mechanism, detailing its function in converting motion types and illustrating inertia forces and couples in connection with this mechanism. The analysis highlights the kinematic conditions that determine the degrees of freedom within the system.