Downloaded 961 times







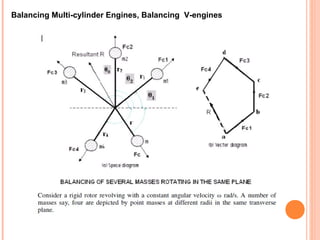







The document discusses balancing of rotating and reciprocating masses. It describes static and dynamic balancing, where static balancing ensures the center of gravity remains stationary during rotation and dynamic balancing ensures the resultant moments are equal to zero. Types of balancing discussed include balancing a single rotating mass with one or two masses in the same or different planes, as well as balancing multiple masses in the same or different planes. Examples provided calculate the magnitude and position of balancing masses given masses, radii of rotation, and angular positions of unbalanced masses.













































































