Downloaded 27 times
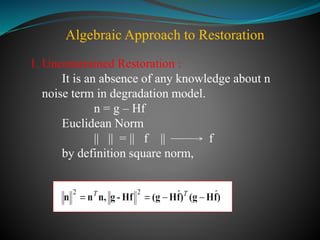
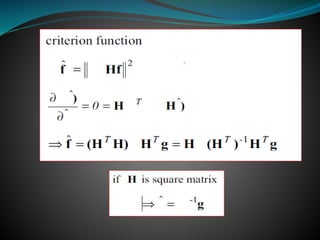
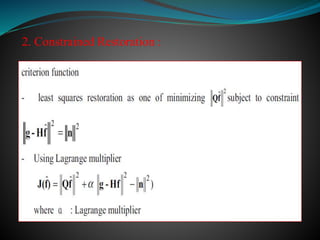
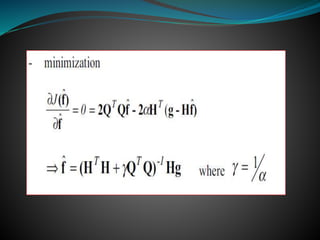
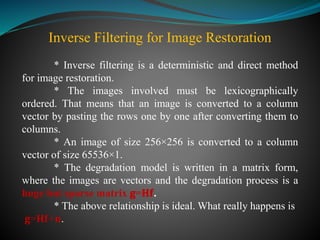
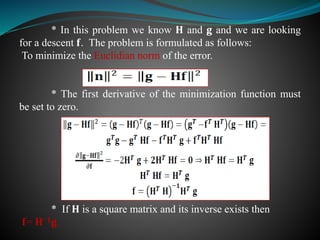
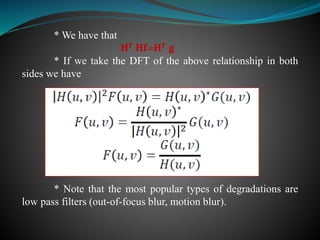
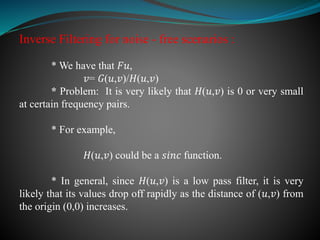

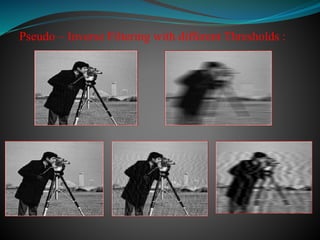
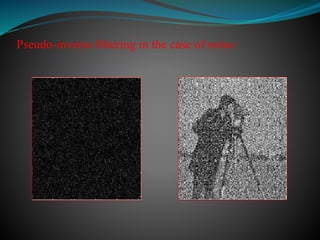
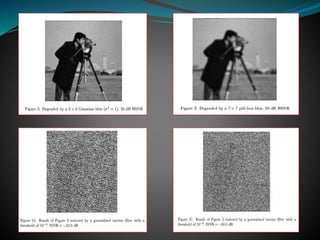
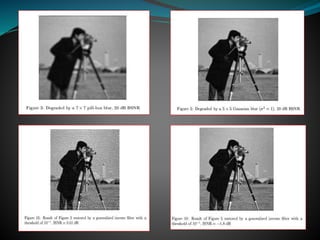

This document summarizes digital image processing techniques including algebraic approaches to image restoration and inverse filtering. It discusses: 1) Unconstrained and constrained restoration, with unconstrained having no knowledge of noise and constrained using knowledge of noise. 2) Inverse filtering which is a direct method that minimizes error between degraded and original images using matrix operations, but can be unstable due to noise or near-zero filter values. 3) Pseudo-inverse filtering which adds a threshold to the inverse filter to avoid instability, working better for noisy images by not amplifying high frequency noise.