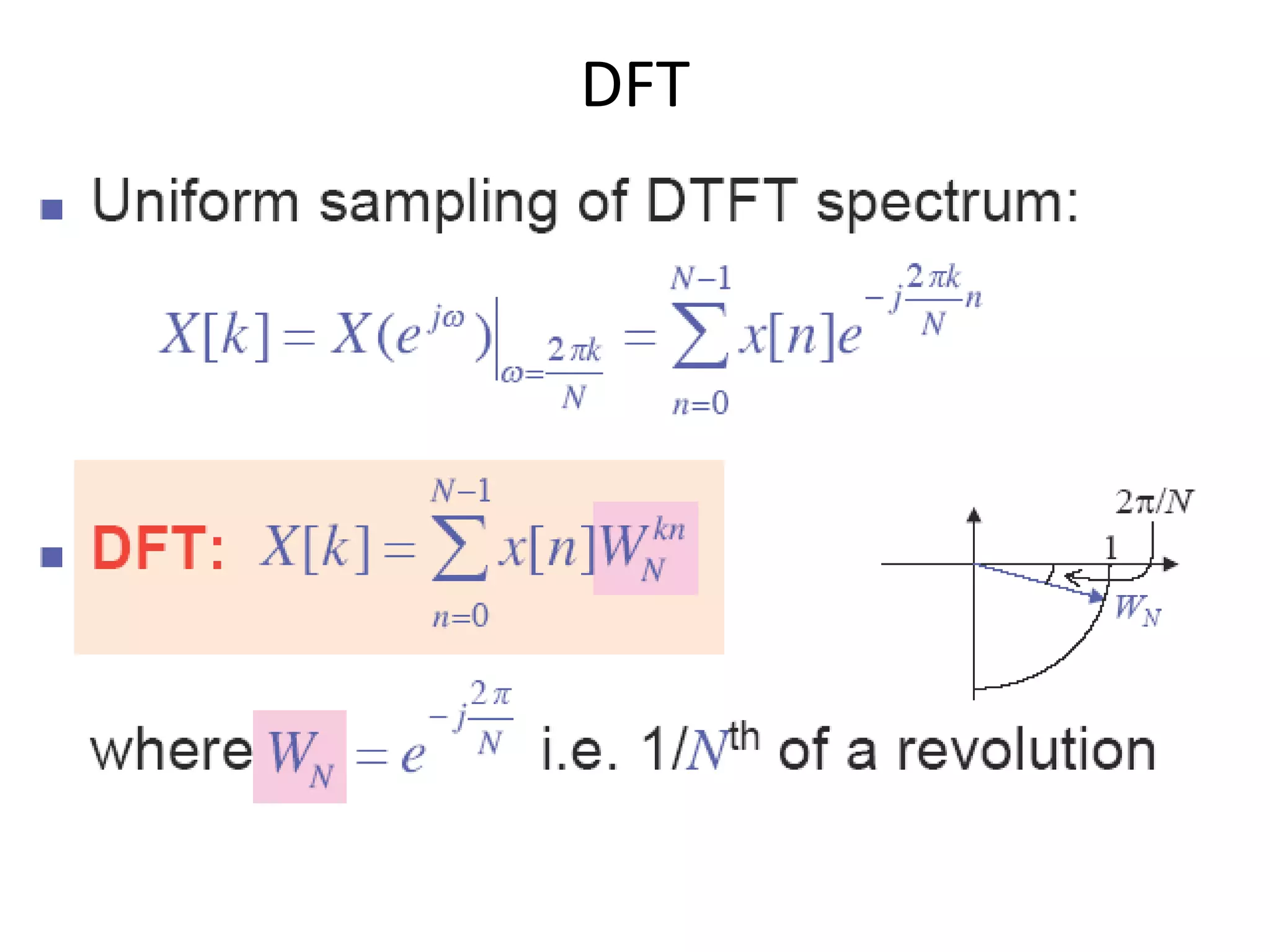
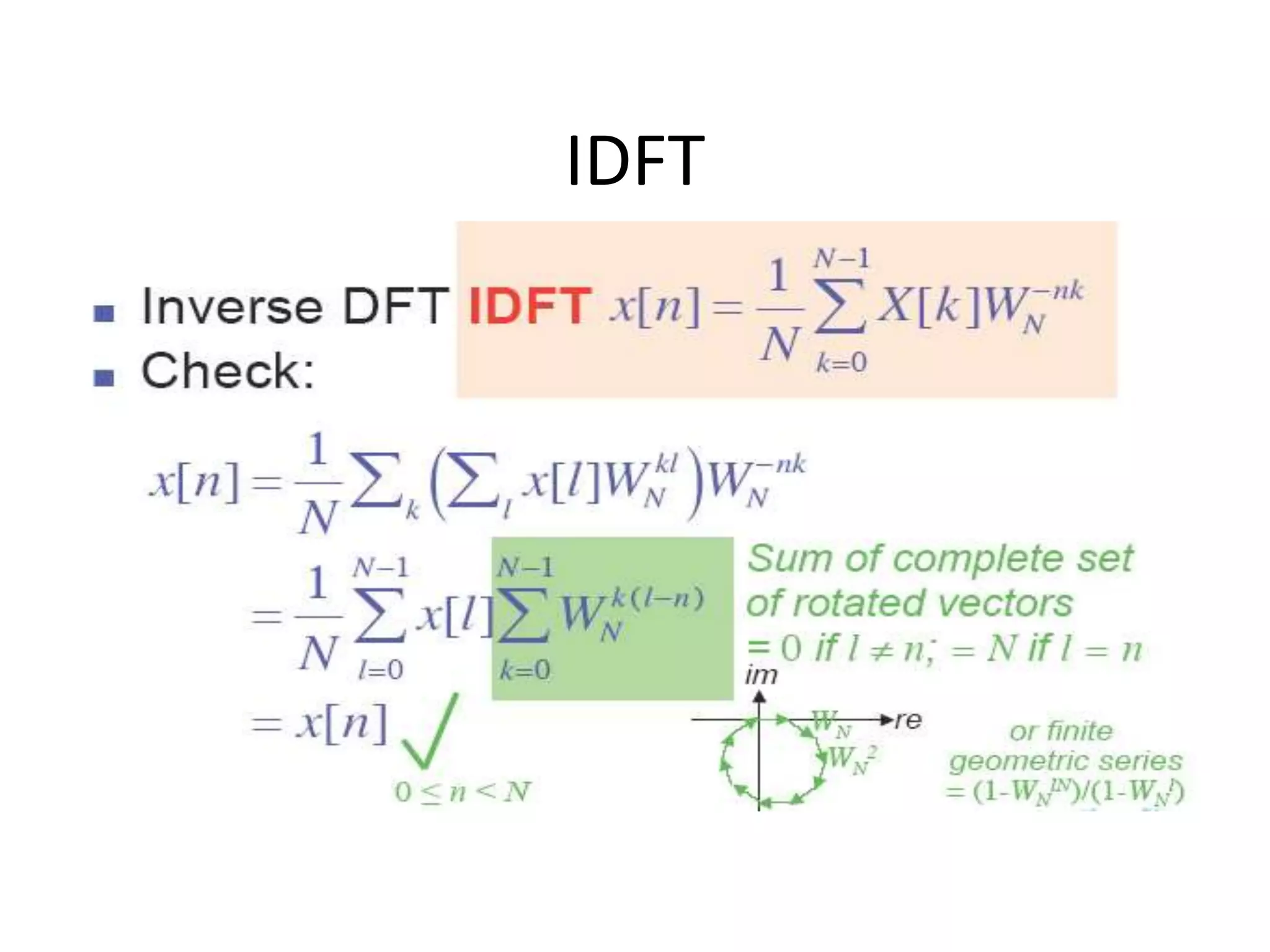
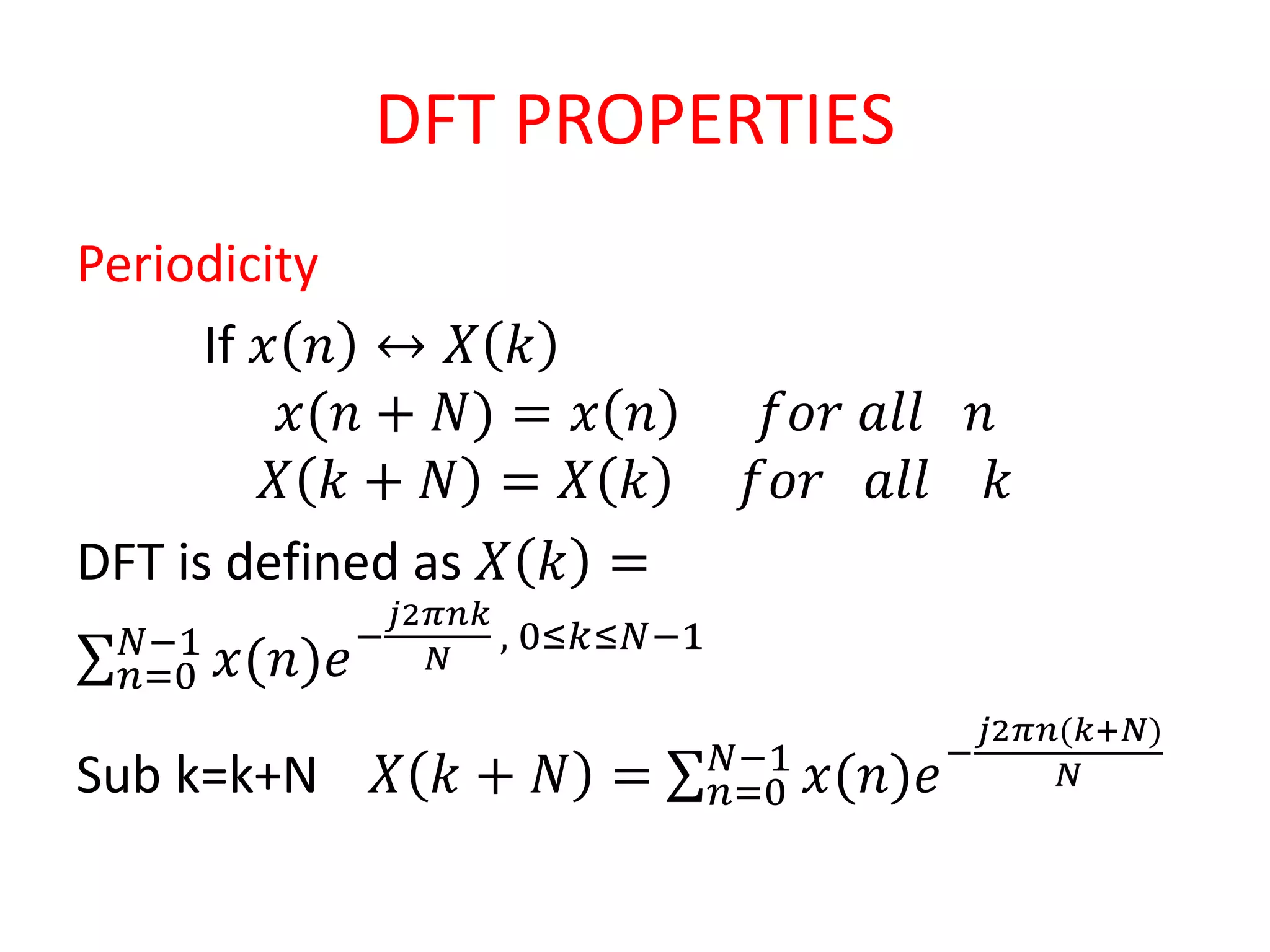
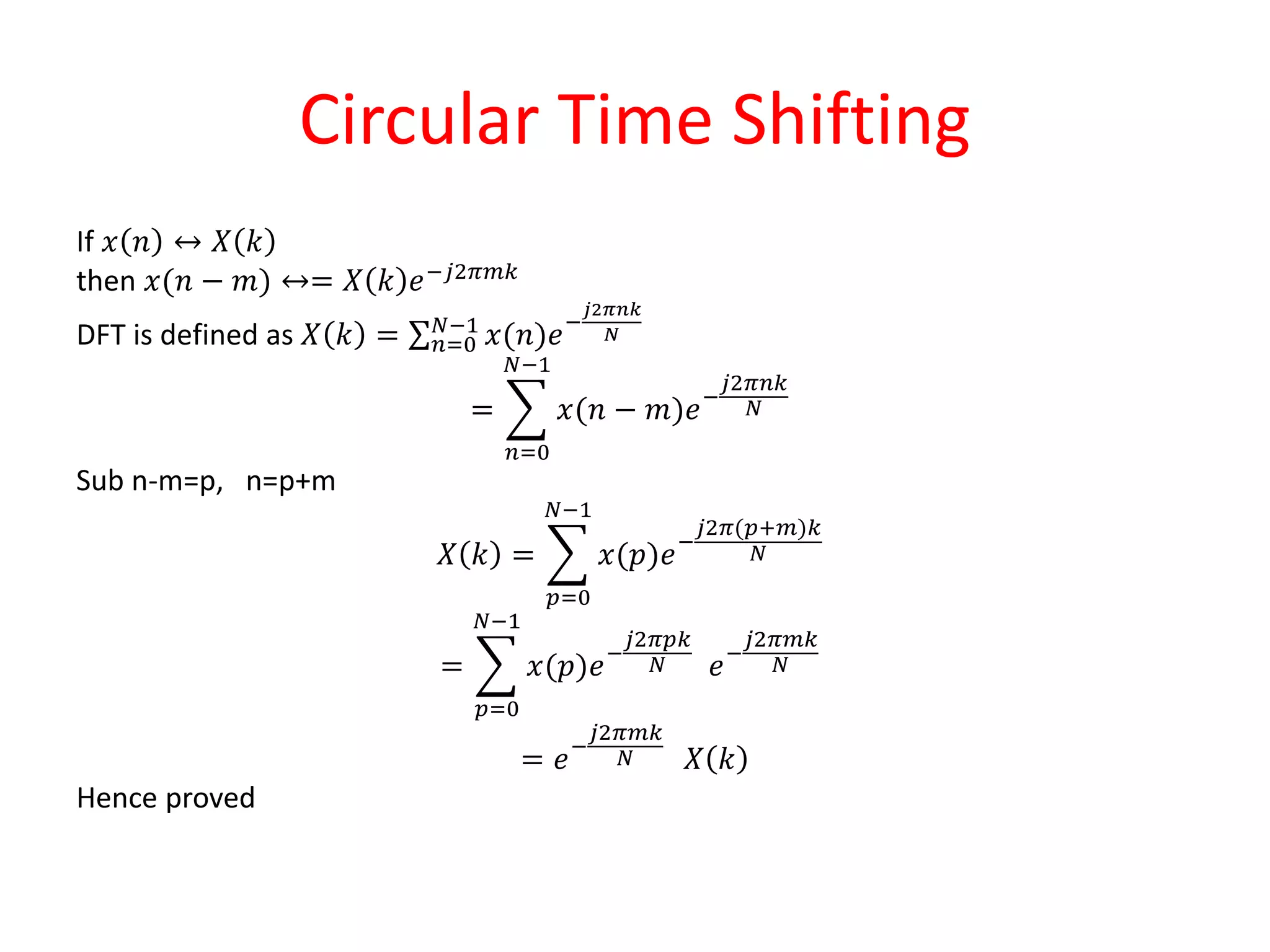
Transforms, such as the Fourier transform, make calculations involving signals easier by allowing analysis and computation to be done in either the time or frequency domain. The discrete Fourier transform (DFT) represents a signal as the sum of sinusoids at discrete frequencies. The DFT has several important properties including periodicity, linearity, time shifting, time reversal, and convolution. These properties allow signals to be analyzed and manipulated in the frequency domain.
![Discrete Time Fourier Transform Pair
n
n
n
j
j
e
n
x
e
X )
(
)
(
Analysis
d
e
e
X
n
x n
j
j
)
(
2
1
)
(
Synthesis Inverse Fourier Transform
(IFT)
Fourier Transform
(FT)
)]
(
[
)
( n
x
e
X j
F
)]
(
[
)
( 1
j
-
e
X
n
x F
)
(
)
(
j
e
X
n
x F](https://image.slidesharecdn.com/dsp-220106094116/75/DFT-and-its-properties-4-2048.jpg)
![Cond..
𝑋 𝑘 + 𝑁 =
𝑛=0
𝑁−1
𝑥(𝑛)𝑒−
𝑗2𝜋𝑛𝑘
𝑁 𝑒−
𝑗2𝜋𝑛𝑁
𝑁
𝑋 𝑘 + 𝑁 =
𝑛=0
𝑁−1
𝑥(𝑛)𝑒−
𝑗2𝜋𝑛𝑘
𝑁
[𝑒−𝑗2𝜋𝑛
= 1]
𝑋 𝑘 + 𝑁 = 𝑋 𝑘
Hence Proved.](https://image.slidesharecdn.com/dsp-220106094116/75/DFT-and-its-properties-9-2048.jpg)
![Linearity
• If 𝑥1 𝑛 ↔ 𝑋1 𝑘 𝑎𝑛𝑑 𝑥2 𝑛 ↔ 𝑋2 𝑘
Then ∝ 𝑥1 𝑛 + β𝑥2 𝑛 ↔ α𝑋1 𝑘 + β𝑋2 𝑘
DFT is defined as 𝑋 𝑘 = 𝑛=0
𝑁−1
𝑥(𝑛)𝑒−
𝑗2𝜋𝑛𝑘
𝑁
=
𝑛=0
𝑁−1
[∝ 𝑥1 𝑛 + β𝑥2 𝑛 ]𝑒−
𝑗2𝜋𝑛𝑘
𝑁
=
𝑛=0
𝑁−1
∝ 𝑥1 𝑛 𝑒−
𝑗2𝜋𝑛𝑘
𝑁 +
𝑛=0
𝑁−1
β𝑥2 𝑛 𝑒−
𝑗2𝜋𝑛𝑘
𝑁
=∝
𝑛=0
𝑁−1
𝑥1 𝑛 𝑒−
𝑗2𝜋𝑛𝑘
𝑁 + β
𝑛=0
𝑁−1
𝑥2 𝑛 𝑒−
𝑗2𝜋𝑛𝑘
𝑁
=α𝑋1 𝑘 + β𝑋2 𝑘
Hence proved](https://image.slidesharecdn.com/dsp-220106094116/75/DFT-and-its-properties-10-2048.jpg)
![Circular Convolution Property
If 𝑥1(𝑛) ↔ 𝑋𝑘 and 𝑥2 𝑛 ↔ 𝑋2 𝑘
then 𝑥1 𝑛 ∗ 𝑥2 𝑛 ↔ 𝑋1 𝑘 . 𝑋2 𝑘
DFT is defined as 𝑋 𝑘 = 𝑛=0
𝑁−1
𝑥(𝑛)𝑒−
𝑗2𝜋𝑛𝑘
𝑁
=
𝑛=0
𝑁−1
𝑥1 𝑛 ∗ 𝑥2 𝑛 ]𝑒−
𝑗2𝜋𝑛𝑘
𝑁
=
𝑛=0
𝑁−1
𝑚=0
𝑁−1
𝑥1 𝑚 𝑥2(𝑛 − 𝑚) 𝑒−
𝑗2𝜋𝑛𝑘
𝑁
[𝑥1 𝑛 ∗ 𝑥2 𝑛 = 𝑛=0
𝑁−1
𝑥1 𝑚 𝑥2 𝑛 − 𝑚 ]](https://image.slidesharecdn.com/dsp-220106094116/75/DFT-and-its-properties-13-2048.jpg)
![Cond..
=
𝑚=0
𝑁−1
𝑥1(𝑚)
𝑛=0
𝑁−1
𝑥2(𝑛 − 𝑚) 𝑒−𝑗2𝜋𝑛𝑘/𝑁
= 𝑋2(k) 𝑚=0
𝑁−1
𝑥1(𝑚) 𝑒−𝑗2𝜋𝑚𝑘/𝑁
[using
time shift]
= 𝑋2 𝐾 𝑋1(𝐾)
Hence proved](https://image.slidesharecdn.com/dsp-220106094116/75/DFT-and-its-properties-14-2048.jpg)
![Multiplication property
If 𝑥1(𝑛) ↔ 𝑋1(𝐾) and 𝑥2 𝑛 ↔ 𝑋2 𝑘
then 𝑥1 𝑛 𝑥2 𝑛 ↔ 1/𝑁[𝑋1 𝑘 ∗ 𝑋2 𝑘 ]
DFT is defined as 𝑋 𝑘 = 𝑛=0
𝑁−1
𝑥(𝑛)𝑒−
𝑗2𝜋𝑛𝑘
𝑁
=
𝑛=0
𝑁−1
𝑥1 𝑛 𝑥2 𝑛 𝑒−
𝑗2𝜋𝑛𝑘
𝑁
We know 𝑥1 𝑛 = 1/𝑁 𝑙=0
𝑁−1
𝑋1 𝑙 𝑒
𝑗2𝜋𝑛𝑙
𝑁
𝑋 𝑘 =
𝑛=0
𝑁−1
1/𝑁
𝑙=0
𝑁−1
𝑋1 𝑙 𝑒
𝑗2𝜋𝑛𝑙
𝑁 𝑥2 𝑛 𝑒−
𝑗2𝜋𝑛𝑘
𝑁](https://image.slidesharecdn.com/dsp-220106094116/75/DFT-and-its-properties-15-2048.jpg)
![Cond..
=
1
𝑁
𝑙=0
𝑁−1
𝑋1(𝑙)
𝑛=0
𝑁−1
𝑥2(𝑛)𝑒−𝑗2𝜋𝑛(𝑘−𝑙)/𝑁
=
1
𝑁
𝑙=0
𝑁−1
𝑋1(𝑙)𝑋2(𝑘 − 𝑙)
=
1
𝑁
[𝑋1 𝑙 ∗ 𝑋2 𝑙 ]
=
1
𝑁
[𝑋1 𝑘 ∗ 𝑋2 𝑘 ]
Hence Proved.](https://image.slidesharecdn.com/dsp-220106094116/75/DFT-and-its-properties-16-2048.jpg)