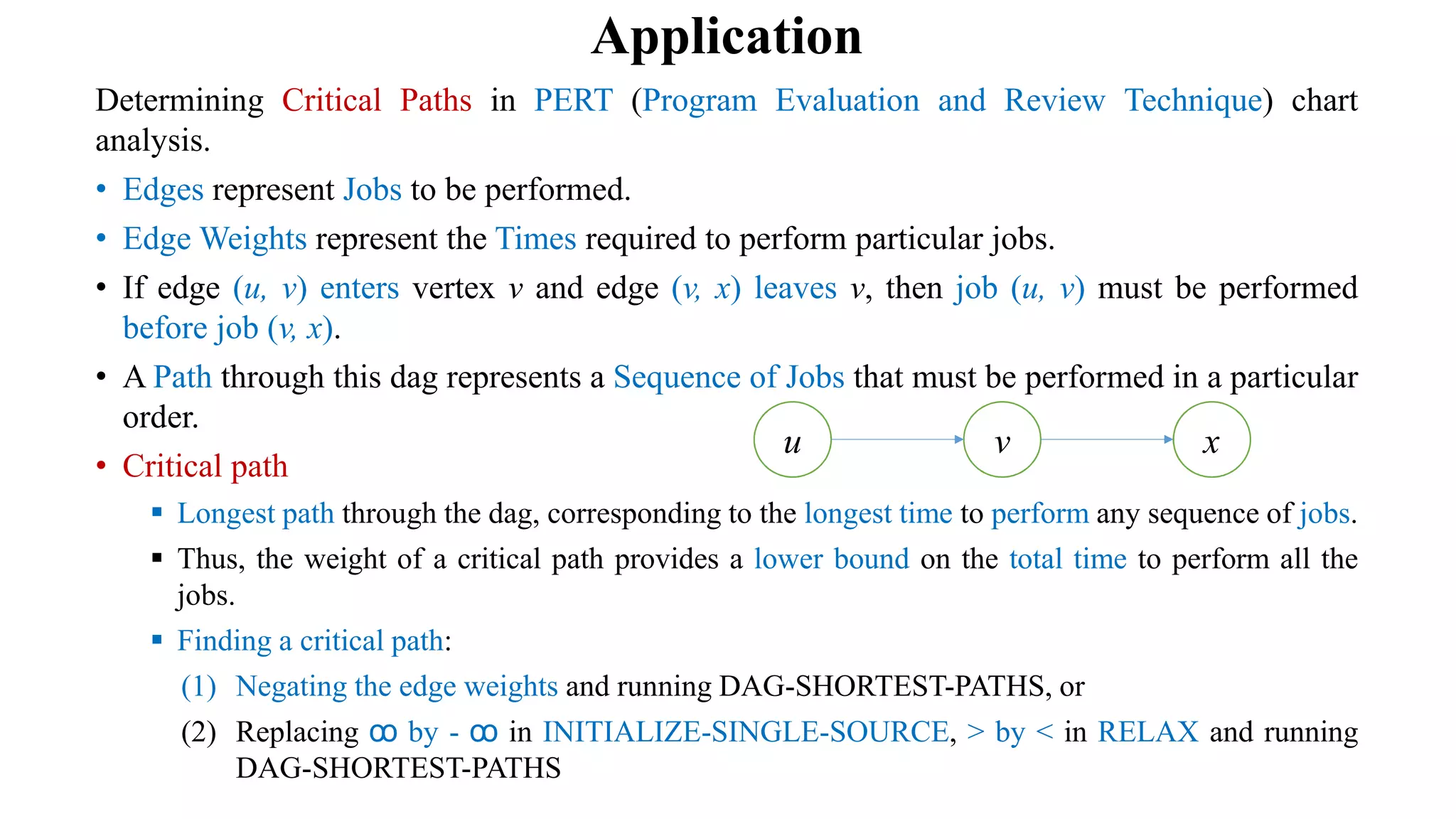
The document describes the single-source shortest paths algorithm for directed acyclic graphs (DAGs). It involves topologically sorting the vertices of the DAG, initializing distances from the source vertex s, and then relaxing edges in topologically sorted order. This guarantees that when a vertex u is relaxed, the shortest path distances from s to its neighbors will be accurate. The algorithm runs in O(V+E) time. It is used to find critical paths in PERT charts by finding the longest path after negating or reversing edge weights.
![Algorithm
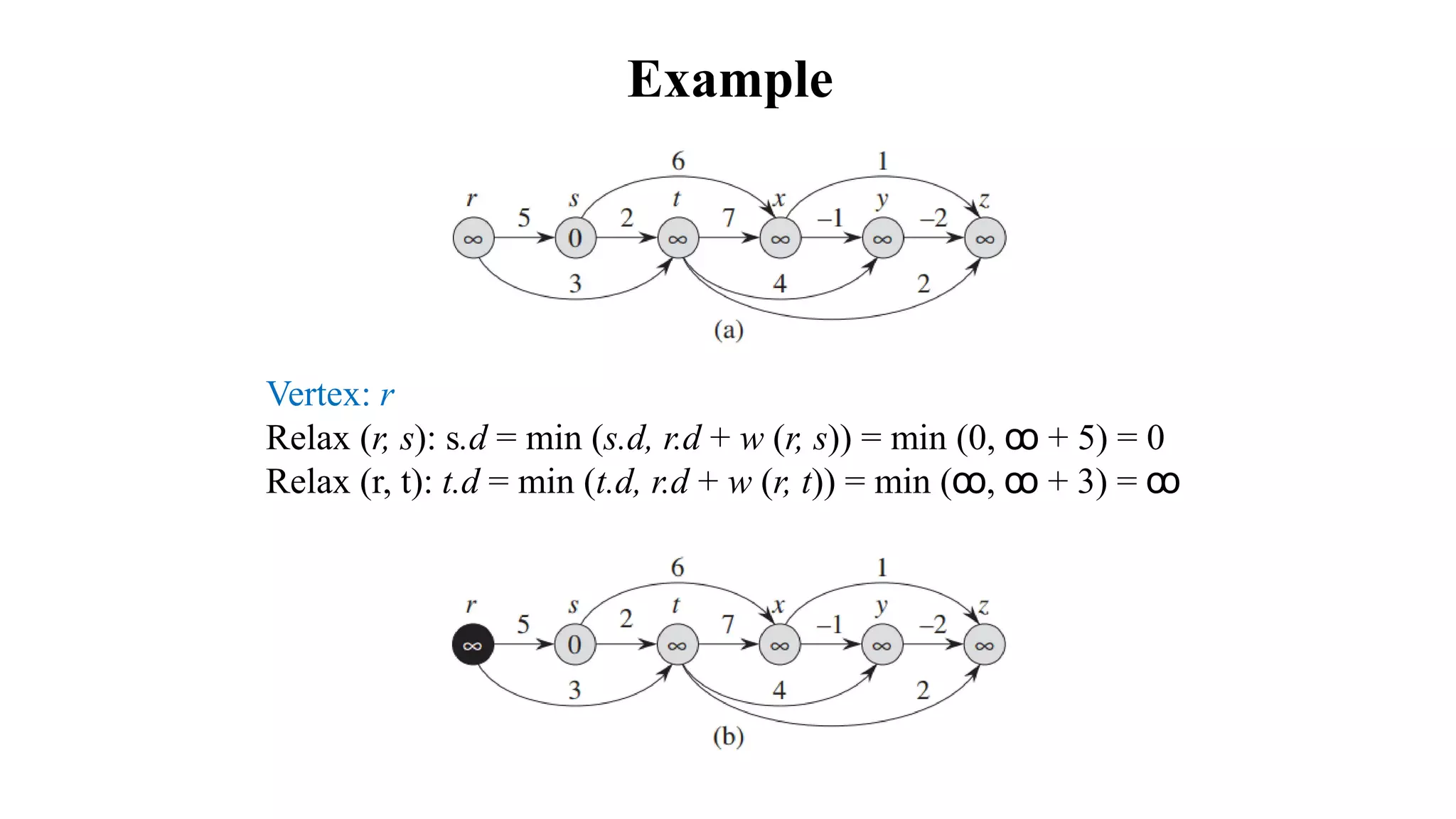
Given a Weighted, Directed Acyclic Graph (DAG) G = (V, E), the Shortest Paths
from a single source is computed by Relaxing the edges according to a Topological
Sort of its vertices.
TOPOLOGICAL-SORT (G)
Call DFS (G) to compute finishing times
v.f for each vertex v.
As each vertex is finished, insert it onto
the front of a linked list.
Return the linked list of vertices.
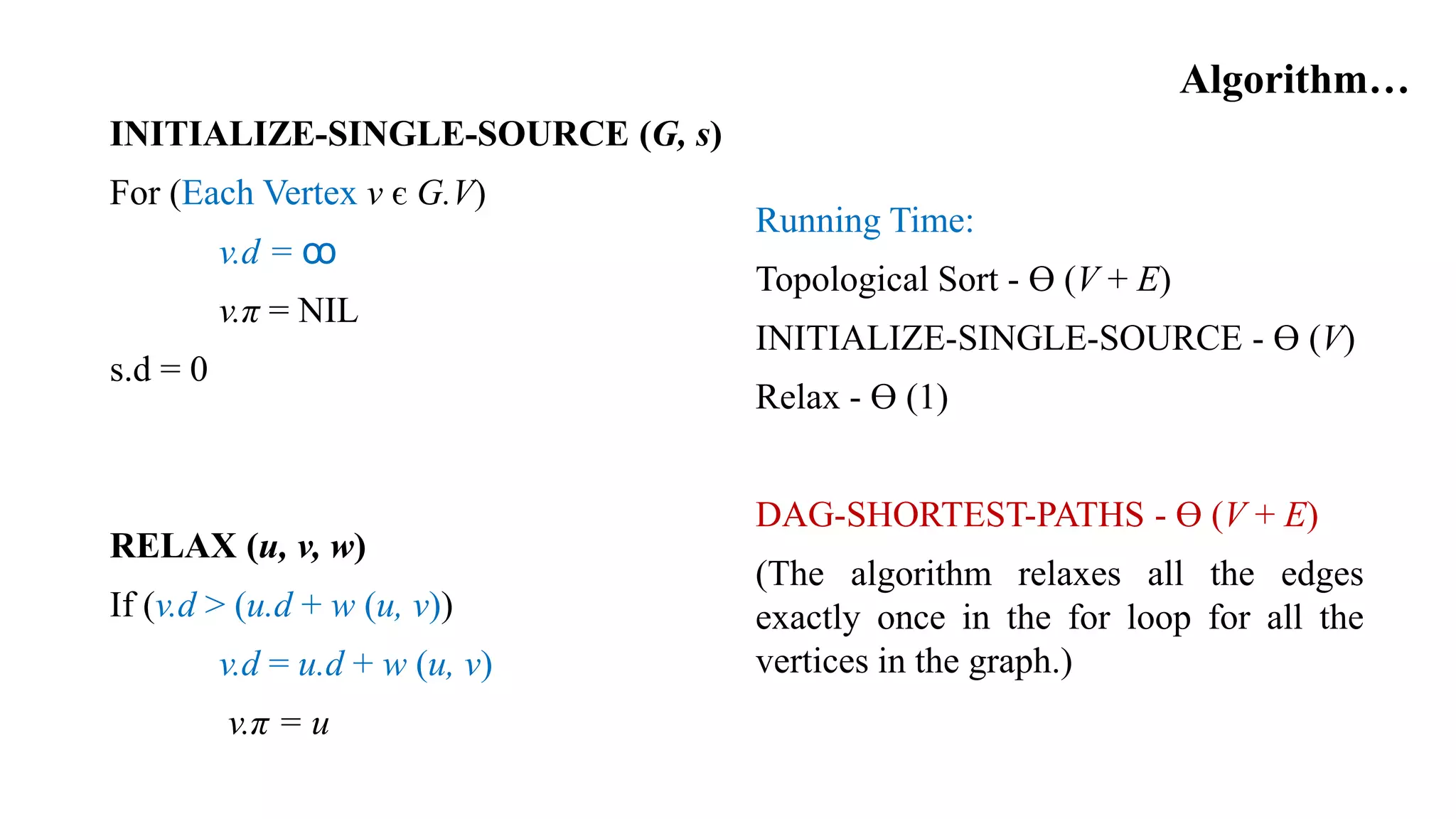
DAG-SHORTEST-PATHS (G, w, s)
Topologically Sort the vertices of G
INITIALIZE-SINGLE-SOURCE (G, s)
For each vertex u, taken in
Topologically Sorted order
For each vertex v є G.Adj [u]
RELAX (u, v, w)](https://image.slidesharecdn.com/singlesourceshortespathindag-200422172950/75/Single-source-shortes-path-in-dag-2-2048.jpg)