Download to read offline

![3D Rotations about Arbitrary Axis
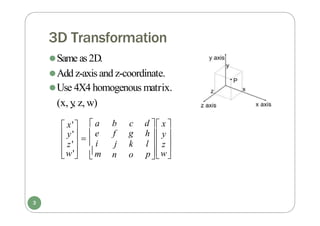
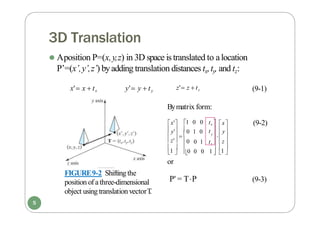
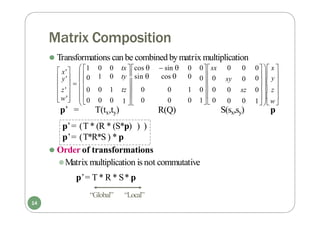
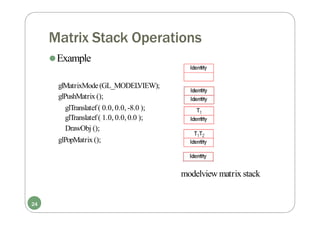
⚫Rotate about the arbitraryaxis through P1 and P2:
1. Translate P1 to origin.
2.Rotate so that the rotation axis is alignedwith one of the
principle coordinate axes.
3. Perform the desired rotation about coordinate axis.
4. Rotate axis back (inverse rotation of 2).
5. Translate axis back(inverse translation of 1).
P1
x
y
z
Arbitraryaxis
P2
9
[T]
[R1]
[R-axis]
[R1]-1
[T]-1](https://image.slidesharecdn.com/3dtransformationnew-240510111910-c9a879da/85/Computer-Graphics-Three-Dimensional-Geometric-Transformations-9-320.jpg)
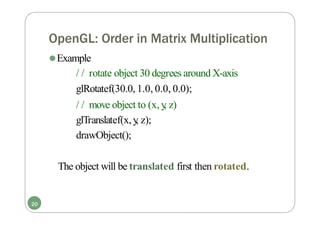
![OpenGL Geometric Transformation Functions
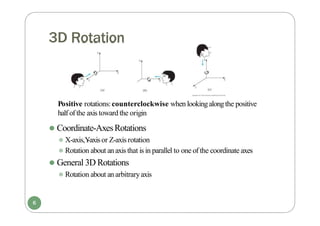
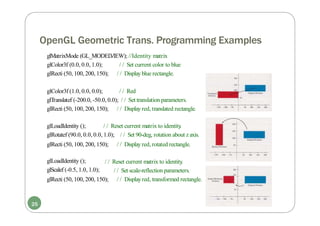
⚫Becareful of manipulating the matrix in OpenGL
⚫OpenGLuses 4X4 matrix for transformation.
⚫The 16 elements are stored as1D in column-majororder
OpenGLtransformmatrix
⚫C and C++ store matrices in row-majororder
⚫Ifyou declare amatrix to be used in OpenGLas
GLfloat M[4][4];to accessthe element in row i and column j, you
need to refer to it byM[j][i];or, as
GLfloat M[16];and then you need to convert it to conventional row-
majororder.
16](https://image.slidesharecdn.com/3dtransformationnew-240510111910-c9a879da/85/Computer-Graphics-Three-Dimensional-Geometric-Transformations-16-320.jpg)
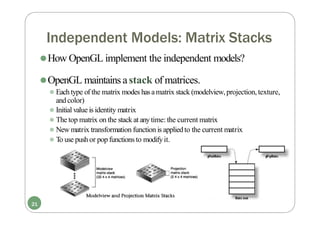
![OpenGL Geometric Transformation Functions
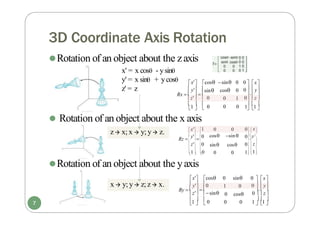
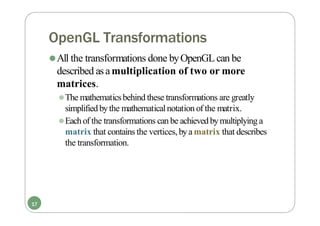
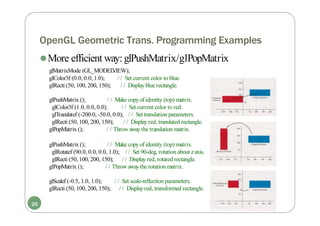
⚫ BasicOpenGLgeometrictransformations on the matrix:
glT
ranslate* (tx, ty
, tz);
[ glTranslatef(25.0,-10.0,10.0);
- Post-multiplies the current matrix byamatrix that moves the object bythe given x-,
y-, and z-values
glScale* (sx, sy
, sz);
[glScalef (2.0, -3.0, 1.0); ]
- Post-multiplies the current matrix byamatrix that scalesan object about the origin.
None of sx, syor sziszero.
glRotate* (theta,vx, vy
, vz);
[ glRotatef (90.0, 0.0, 0.0, 1.0); ]
- Post-multiplies the current matrix byamatrix that rotates the object in a
counterclockwise direction. vector v=(vx, vy,vz) defines the orientation for the
rotation axis that passesthrough the coordinate origin.( the rotation center is (0, 0, 0) )
18](https://image.slidesharecdn.com/3dtransformationnew-240510111910-c9a879da/85/Computer-Graphics-Three-Dimensional-Geometric-Transformations-18-320.jpg)


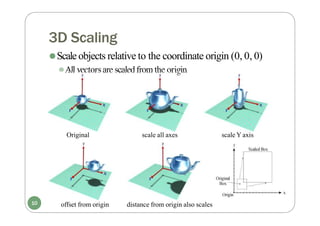
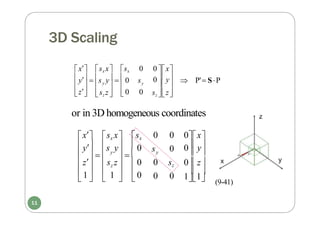
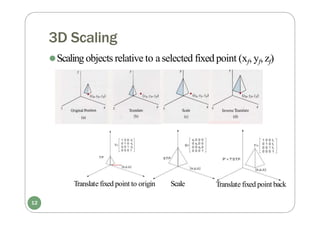
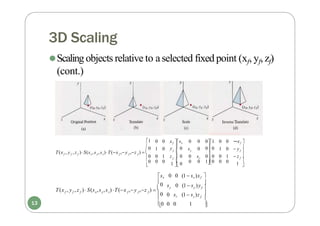
Chapter 5 discusses three-dimensional geometric transformations in computer graphics, covering key components such as 3D translation, rotation, scaling, and coordinate system transformations. It details various transformation methods using 4x4 homogeneous matrices and demonstrates the application of transformations through OpenGL functions. The chapter emphasizes matrix operations and their order in achieving desired transformations in a 3D space.















































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)
















