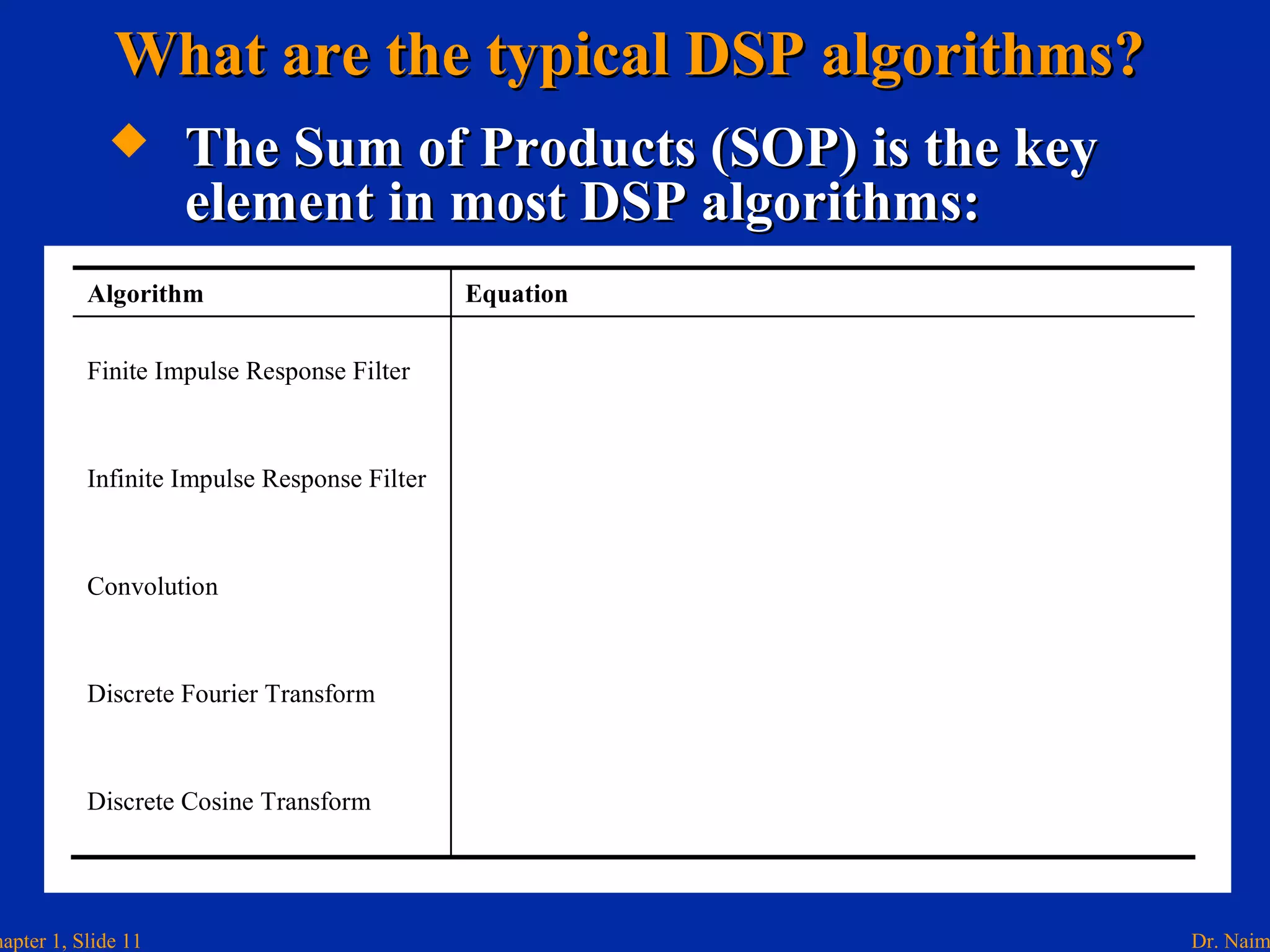
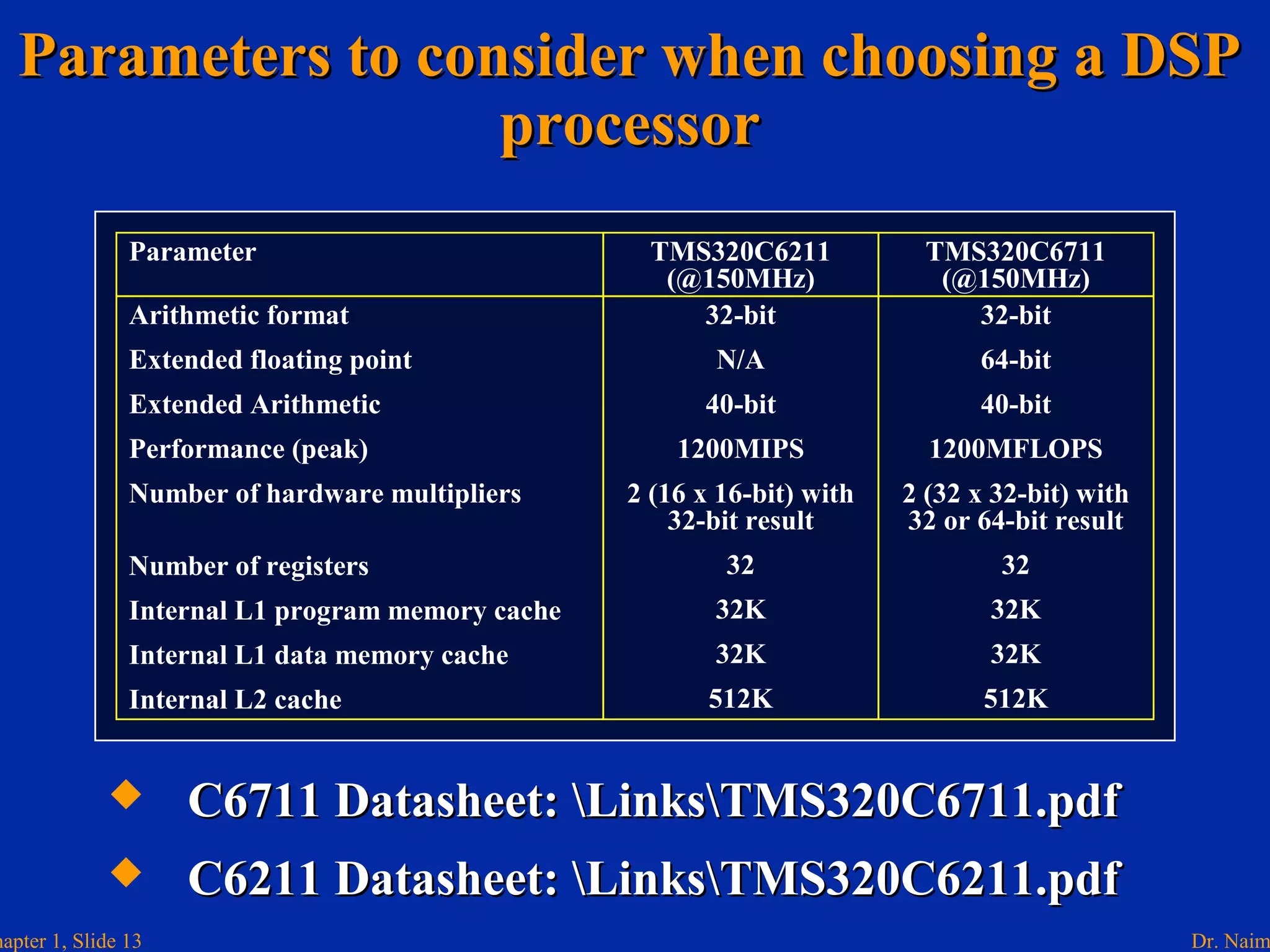
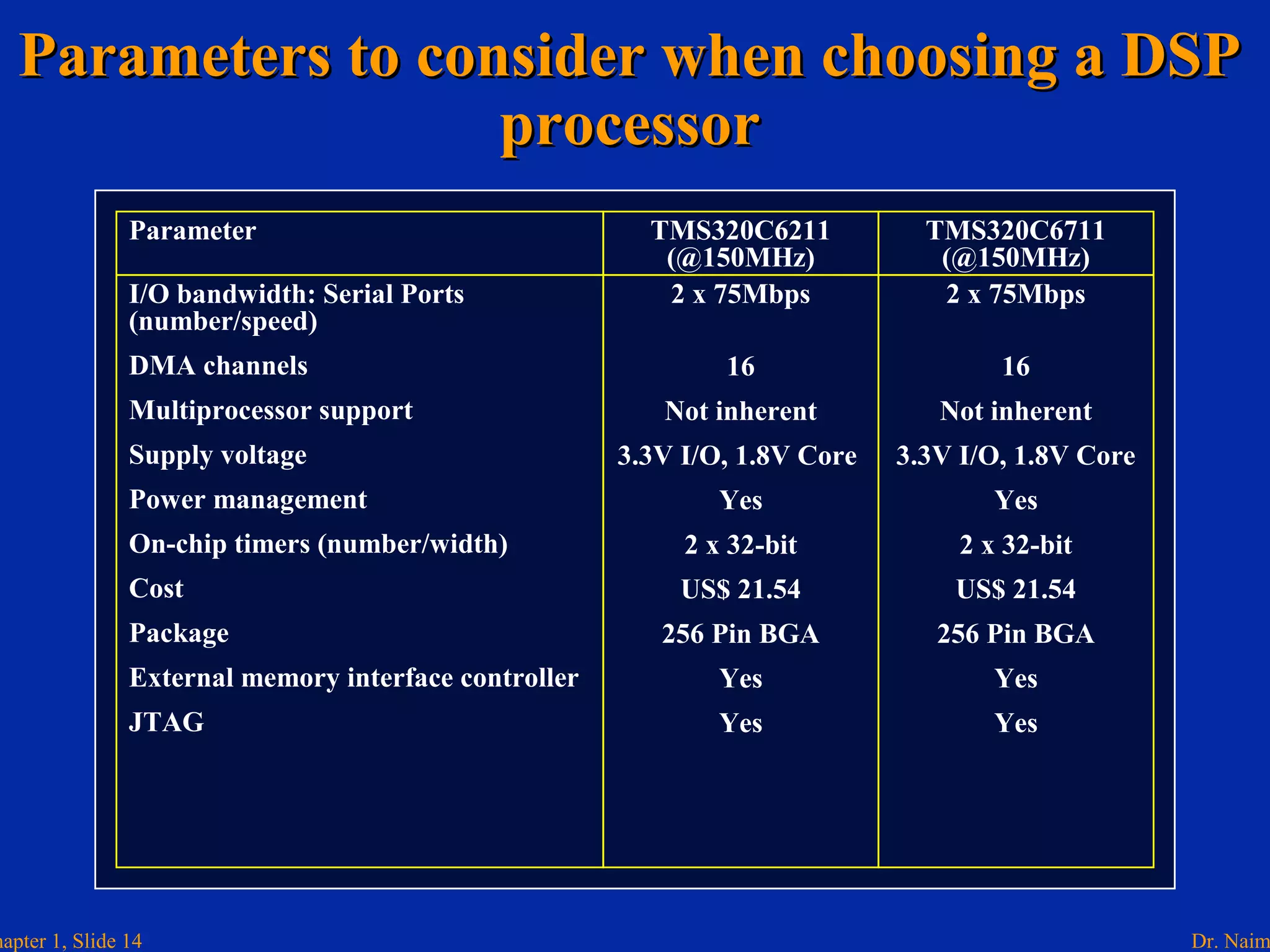
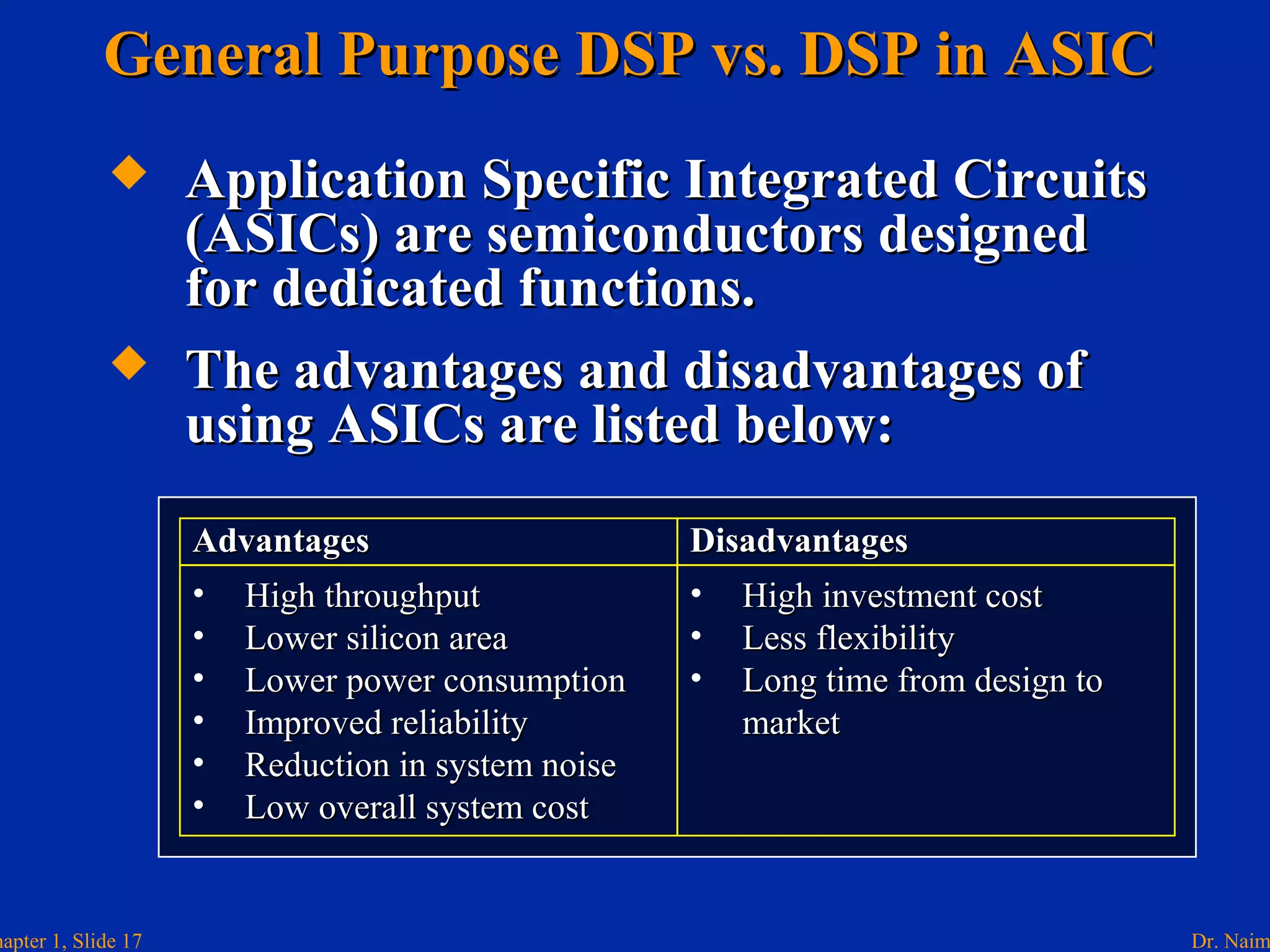
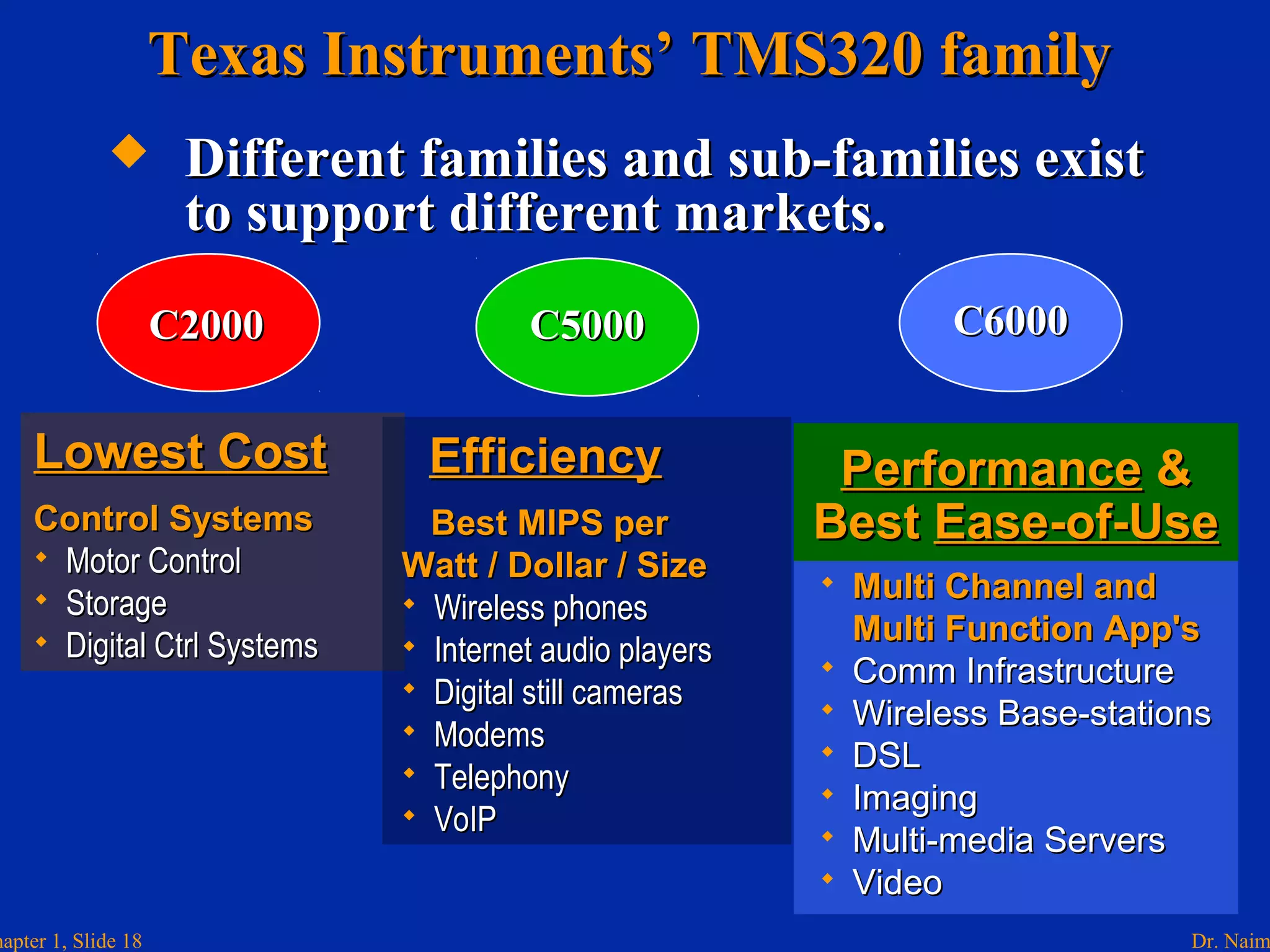
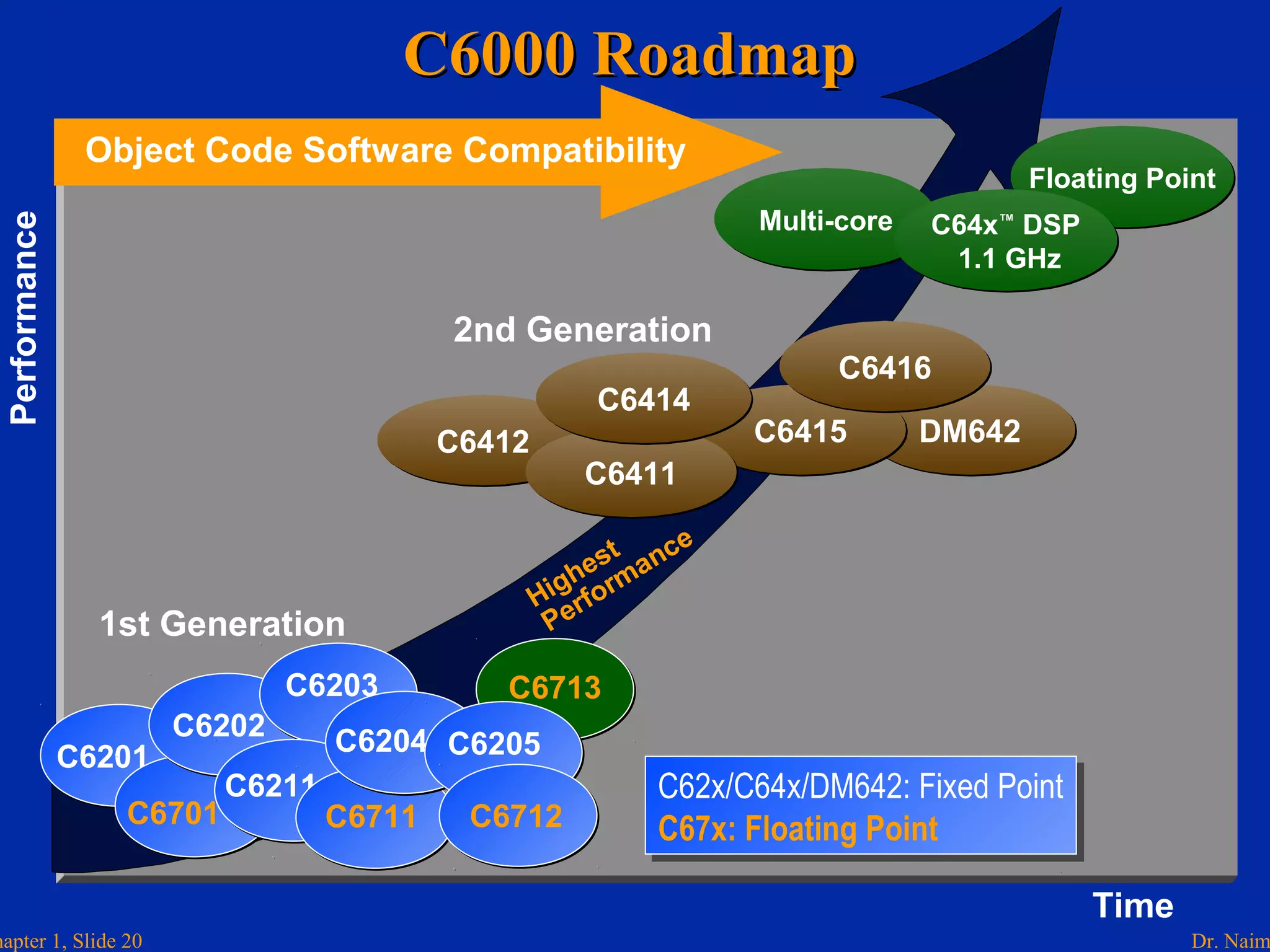
This document provides an introduction to digital signal processing and DSP processors. It discusses why signals are processed digitally, the definition of real-time applications, and typical DSP algorithms like FIR filters. Parameters for choosing a DSP processor include performance, memory, and I/O. Programmable DSPs provide flexibility while ASICs have higher throughput. Texas Instruments' TMS320 family includes fixed-point and floating-point processors. Programmable DSPs allow changing applications while ASICs have higher performance but less flexibility.